



- 收藏
- 加入书签

基于PWM整流的高压大功率发电控制器应用研究
 打开文本图片集
打开文本图片集



摘要:无人机在商用和军用领域的作用日益凸显,高压大功率无人机发电系统的研究成为热点问题。本研究基于PWM整流拓扑,设计一款输出电压稳定在270V的大功率发电控制器,文中阐述控制器的硬件和软件设计,并采用联合仿真对控制器发电工况进行模拟,最后通过试验结果证明设计方案合理可行,系统能够稳定输出270V电压,试验功率达到11.73kW。
关键词:PWM整流;高压大功率;发电控制器
1引言
无人机作为高新技术的代表,在商用领域降低人力成本,提高工作效率,带来显著经济效益;在军用领域能够减少人员伤亡,为军事行动提供全方位的支持保障。应用场景的不断拓展促使无人机发电系统需要具备更长续航时间和更大负载能力,高压大功率的无人机供电系统逐渐成为研究重点[1-3]。发电控制器需要在较宽的转速范围内输出稳定、低纹波的电压,两者为发电控控制器的设计提出了极高的要求。
PWM(Pulse Width Modulation)脉冲宽度调制方法被大量使用在AC/DC变换装置中。该技术由德国学者A.Schonung和H.Stemmler于1964年提出,之后在运动控制[4]、交流电源[5,6]等领域得到广泛应用。本文基于PWM整流拓扑进行模拟仿真,通过嵌入式软件设计,对硬件参数进行合理选取,实现控制器在宽发电转速范围内的稳定电压输出,最终通过试验验证发电系统输出能力。
2 发电系统组成
发电系统由发电机、发电控制器和负载组成,发电机通过传动轴与发动机连接,发动机工作时带动发电机旋转,产生的三相电压传递之发电控制器后经整流滤波输出为稳定直流电,供负载使用。本文针对发电控制器进行研究设计,配套电机发电转速范围5000~12000rpm,线电压为67~160.8Vrms,发电机转速为5000rpm时,系统输出功率不低于3.1kW,转速7000rpm时,系统输出功率不低于5.6kW,转速为9000rpm~12000rpm时,系统输出功率不低于10.0kW。
3发电控制器设计
发电转速范围内线电压经自然整流后电压范围为94.7~227.4V,低于270V直流电压,故发电控制器采用PWM整流升压拓扑进行设计。
3.1 控制原理及仿真
3.3.1 控制原理
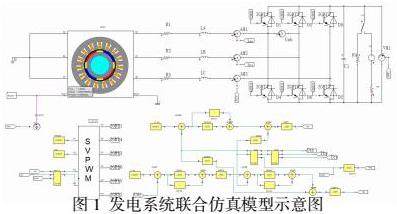
通过位置传感器解算电机转子位置和转速,用于控制坐标变换,采用输出电压Vdc为反馈量,参考电压Vref与Vdc经PI调节得到有功电流参考iq*;预置无功率电流控制参考id*=0。三相电流值经Clarke变换和Park变换得到有功电流iq和无功电流id,将参考电流与变换得到的电流经PI调节得到SVPWM控制信号ud和uq,再通过反Park变换得到uα和uβ,最后通过两相到三相的坐标变换,转换后的值通过六路PWM信号输入到三相桥中,实现对输出电压的控制。
3.3.2 模型仿真
系统联合仿真模型如下图所示:
根据发电工况要求,对各工况进行仿真,仿真结果如下:
仿真结果显示在各工况点发电系统的输出电压、电压纹波以及输出功率均满足要求,设计原理可行,控制方法合理。
3.2电路设计
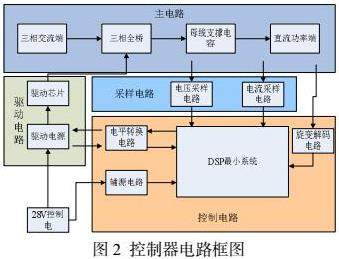
控制器电路设计框图如下,包含主电路、采样电路、控制电路和驱动电路。主电路包含三相全桥和母线电容;采样电路包含电压、电流采样电路;控制电路包含DSP最小系统、电平转换电路、辅源电路和旋变解码电路;驱动电路包含驱动芯片和驱动电源。
3.2.1 主电路
a)三相全桥
系统额定输出功率10kW,输出电压270V,输出电流37A,采用三个IGBT半桥模块FF400R06KE3组成三相全桥。该半桥额定电压600V,过流能力为400A。
b)母线电容
发电状态下母线电容最小值为:
式中Pmax为输出最大功率,η为效率,fs是开关频率,Δu为纹波电压,kDC取值50%,通过计算可得电容 最小为190μF。采用采用12个35μF的薄膜电容并联,总容量为420μF,耐电压等级650V。
3.2.2 控制电路
a)DSP最小系统
控制器采用嵌入式系统,主控芯片为DSP28335,采用晶振频率为30MHz。
b)辅源电路
控制器工作时需要外部提供+28V控制电源,经滤波稳压后通过隔离电源模块转换为各芯片工作所需电压。
c)旋变解码电路
控制器通过旋转变压器获取转子位置和转速信息,旋变解码电路用以将旋变电压信号转换为能被DSP识别的数字信号。
d)电平转换电路
电平转换电路用于实现主控芯片信号与外部功能电路间的信号连接和电平转换。
3.2.3 采样电路
a)电流采样电路
控制器需要采样精确的相电流和母线电流信号,采用穿孔式霍尔传感器作为采样芯片,后级增加运放调整电压值并输出至主控芯片。
b)电压采样电路
电压信号经分压电路分压处理后进入隔离运放,之后输出至主控芯片。
3.2.4 驱动电路
每支半桥需两路隔离驱动信号控制上下管,共需6路驱动电路控制三相桥,每一路驱动都采用独立电源及参考地。
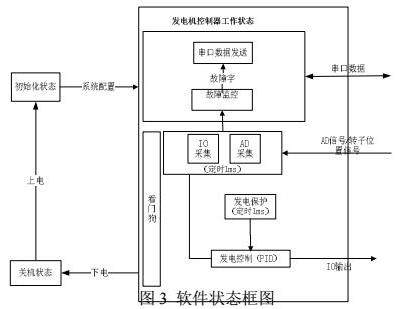
3.3 软件设计
软件运行程序如下,系统上电后进入初始化状态,同时允许中断。执行起动程序后系统对工作电流、电压进行实时采样,采样值经计算处理,通过控制算法调节PWM占空比以限制工作电流,若工作中发现其超出设定值,系统将会停机,保证整个系统的安全。
4 试验结果
按照系统发电工况要求,在发电机转速5000rpm、7000rpm、9000rpm、12000rpm时分别测量带载情况并记录输出电压和纹波,数据如下:
控制器在电机转速为5000rpm时输出电压为267.6V,电压纹波3.8V,输出功率3.28kW;转速7000rpm时输出电压267.9V,电压纹波4.3V,输出功率5.62kW;转速9000rpm时输出电压266.8V,电压纹波5.8V,输出功率10.34kW;转速12000rpm时输出电压266.7V,电压纹波5.6V,输出功率11.73kW,各工况点的输出值均满足要求。
5 结论
本文基于PWM整流电路拓扑,设计了一款输出电压为270V的大功率发电控制器,与发电机组成高压大功率发电系统。联合仿真结果显示模型在各工况点电压、电压纹波和功率输出都符合设计要求,对控制器的硬件电路和软件程序进行设计,之后与发电机进行联试,试验结果显示在各工况点系统的输出电压、电压纹波和功率都满足设计要求,控制器能够稳定输出270V电压,电压纹波小于6V,试验时最高功率达到11.73kW。
参考文献
[1]张占松,蔡宣三. 开关电源的原理与设计[M].北京:电子工业出版社, 2014.
[2]游剑文. 移相全桥开关电源的设计[D].成都:电子科技大学, 2021.
[3]刘振权. 软开关PWM整流器技术研究[D].北京:北京交通大学, 2011.
[4]刘凤君. 正弦波逆变器[M].北京:科学出版, 2014.
[5]李永东. 交流电机数字控制系统[M].北京:机械工业出版社, 2016.
[6]林新春,康勇,陈坚等. UPS逆变电源波形补偿分析技术研究[J].电气传动,2022,(6):21-24.

 京公网安备 11011302003690号
京公网安备 11011302003690号


