



- 收藏
- 加入书签

基于视频处理芯片电流模式放大器的设计
 打开文本图片集
打开文本图片集

摘 要:嵌入式系统低功耗设计的目标是在满足用户对性能需求的前提下,尽可能降低系统的能耗,延长设备的待机时间,这是解决嵌入式设备小体积、高性能与有限的电池能量之间矛盾的有效手段。讨论了航拍无人机的电源模块低功耗设计的具体要求,提出了应用于成像系统视频处理芯片的低压低功耗CMOS电流反馈运算放大器的设计,并进行了CSMC 0.5μm CMOS工艺模型的HSPICE仿真。
关键词:航拍无人机;低压低功耗;电流运算放大器;电流模
中图分类号:TN432 ; TN722 文献标识码:A 文章编号:1009-5624(2025)04-0042-07
Abstract: The goal of low-power design for embedded systems is to minimize system energy consumption and extend device standby time while meeting user performance requirements. This is an effective way to solve the contradiction between small size, high performance, and limited battery energy of embedded devices. The paper firstly aims at the low power aerial photography UAV in the whole, and the low voltage/low power CMOS current-feedback operational amplifier applied for imaging system video processing chip has been designed for aerial photography UAV. In the end, the whole circuit is simulated based on CSMC 0.5μm CMOS process with HSPICE.
Keywords: Aerial photography UAV; Low voltage and low power; CFOA; Current-Model
0 引言
目前,我国大力发展低空经济产业,无人机作为一项前沿技术,正以惊人的速度改变着我们的生活方式和各行各业的发展格局。从航拍美景到农业喷洒,从应急救援到城市空中交通,其应用场景日益丰富[1-3]。航拍无人机通过搭载多类传感器,实现了影像实时传输和高危地区探测功能,且画质清晰,操控方便,是卫星遥感与传统航空遥感的有力补充[4-6]。然而,高清航拍、智能遥控、GPS定位、防飞失控、防跌落等复杂功能,又与产品重量、电池能量及待机时间之间产生冲突,要解决这个矛盾,主要是通过改变嵌入式系统供电方式及芯片内部结构来达到降低功耗的目的[7]。视频处理芯片是航拍无人机中不可缺少的一个组成部分,因此研究视频处理芯片中放大器对降低整个芯片的功耗具有重大意义[8]。
本文首先对航拍无人机的电源模块按照低压低功耗的要求进行设计,然后再设计了应用于成像系统视频处理芯片的低压低功耗CMOS电流反馈运算放大器。
1 航拍无人机电源模块设计
航拍无人机的电源模块包括电源充电模块、电压转换模块以及低功耗管理的外设控制器。为了从整体上减少功耗,进行二次开发时必须选定合适的芯片,而选择电源芯片一个最重要的因素就是要首先了解电路中各个模块的工作电压以及工作状态下的电流值,以防止把芯片烧坏[9]。
1.1 电源充电模块
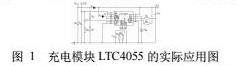
本设计选用的充电模块是LTC4055,该芯片是专为在便携式电池供电型应用中运作而设计的USB电源管理器和锂离子电池充电器,可对USB外设用于操作和电池充电的总电流进行管理和限制。根据电流选择引脚“HPWR”的状态,可以把总输入电流限制为100mA或500mA,从USB电源或电池至USB外设的电压降通常小于100mV&400mA和20mV&80mA,能有效控制输入功耗。
LTC4055性能概要:单集成电路USB电源管理器与电池充电器;确保符合USB输入电流要求;自动电池切换;温度调节防止过热;低压降和低功耗的集成二极管;USB和墙上适配器同时运行;独立充电器:终止、预充电、充电控制和再充电;采用微型4mm×4mm QFN 封装,高度为0.8mm;其它管理功能包括:当输入电源被拿掉时自动切换至电池、浪涌电流限制、反向电流隔离、欠压闭锁和热停机。
LTC4055的实际应用如图1所示,USB电源线信号接在端口1与4,外加适配器通过二极管D2和D1连接到端口14,外部适配器插入后发光二极管就会发光,由端口9设置能承受的最大电流,电流ICL=(VCLPROG/RCLPROG)·49000=49000V/R14,R14不小于105KΩ。其中VCLPROG是芯片CLPROG引脚电压,RCLPROG则是从CLPRO引脚到地的总电阻,假如需要490mA电流限制,则计算RCLPROG=(1V/490mA)·49000=100KΩ。端口11用来设置锂电池的充电电流,ICHG=(VPROG/RPROG)·48500=48500V/R13,R13设置为56KΩ。
LTC4055具有一个内部200mΩ的电源开关,从其输入端至输出端,当USB存在时,该开关可将USB电源连接至负载,结果是负载在USB电压下运行,而不是电池的较低电压。LTC4055内有两个电池充电器路径:第一个是从输入到电池的输入充电器,用于USB充电;另一个电池充电器路径是从输出到电池的输出充电器,用于在检测到外部适配器时为电池充电。该芯片具有一种独特的电流控制方案,即“PowerPath”控制逻辑,可在变化负载条件下为电池充电时保持USB电流限制。这种电流控制方案意味着随着负载电流的降低,更多的电流可用于电池充电,增加可用的充电电流,并缩短充电时间。
1.2 电压转换模块
充电模块产生的电压将近5V,而本设计中需要的电压分别为3.3V、1.8V、1.2V,因此为了给各芯片提供需要的电压,必须进行DC to DC的转换[9]。根据低压低功耗的设计原理,本设计选用芯片LTC3405。
LTC3405是一款高效率、单片式、同步降压型稳压器,该器件采用了一种恒定频率、电流模式架构,操作期间的电源电流仅为20μA,并在停机模式中降至小于1μA。2.5V至5.5V 的输入电压范围使得LTC3405非常适合由单节锂离子电池供电的应用。该器件结构紧凑、易于使用,可在三种不同的输入电源之间无缝转换:单节锂离子电池、USB端口和5V墙上适配器。LTC3405有两种工作模式,可适用于不同的负载条件,实际电路应用如图2所示。
2 电流反馈运算放大器的设计
运放是有源RC电路中最基本的有源器件,这种器件由于具有优良的特性及使用方便的特点而得到了极其广泛的应用[9]。传统的基于电压模式的运算放大器(VFOA)有两个弊端:1)闭环增益和闭环带宽的乘积是常数;2)差动输入级对电流的限幅作用,导致它的输出电压转换速率(SR)很低[10-11]。而电流模式的运算放大器(CFOA)抛弃了传统差动输入级的拓扑结构,采用Smith和Sedra在1970年提出的第二代电流传输器结构作为输入级,获得了理论上无限制的SR和与闭环增益设置无关的近似恒定的带宽[12],并以其在工作速度、精度、带宽和线性度等方面优越的性能广泛应用在高速通信系统和多媒体等领域。
2.1 基本模型及原理分析
CFOA的电路概念出现在数十年之前,当初为了充分发挥这种架构的优势,采用高速互补双极型工艺,因为在双极型晶体管电路中,在所有其它条件相同的情况下,电流的切换速度快于电压,这构成了非饱和发射极耦合逻辑(ECL)和电流输出数模转换器(DAC)等器件的基础[13]。在电流开关节点维持低阻抗有助于降低杂散电容的影响,这是高速运行状态下最大的危害因素之一,而电流镜很好的解决了在低延迟下实现电流开关作用,CFOA的拓扑结构就是基本电流导引原理的应用。
图3给出了简化的电流反馈运算放大器的基本拓扑结构,同相输入端为高阻抗,通过互补射极跟随器Q1和Q2直接缓冲至反相输入端,这种电路结构的反相输出阻抗极低,理想情况下为零,实际一般只有10~100Ω,这是由低发射极电阻造成,也是电流模式与电压模式运算放大器之间的基本差异,同时也使CFOA具有了某些特有的优势[14]。Q1和Q2的集电极输出驱动电流镜,而电流镜则将反相输入电流映射到高阻抗节点,分别表示为RT和CP。高阻抗节点由一个互补单位增益射极跟随器缓冲,从输出到反相输入的反馈电路发生作用,强制反相输入电流归零,电流反馈概念即由此而来。
5 CFOA高频响应波特图
在理想状况下,对于零反相输入阻抗,该节点处不能存在小信号电压,只能存在小信号电流。如果对图3所示CFOA的同相输入端施加一个正向阶跃电压,Q1会立即形成一个成比例的电流送入外部反馈电阻,从而得到一个误差电流,Q3则会将该误差电流映射到高阻抗节点,在高阻抗节点处形成的电压等于该电流与等效阻抗之积。另外,不同于常规VFOA,传递至高阻抗节点的误差电流不受输入级尾电流的限制,电流镜从电源按需提供电流,也就不存在压摆率的限制。在此基础上,负反馈环路强制使输出电压达到某个值,从而将反相输出误差电流归零。
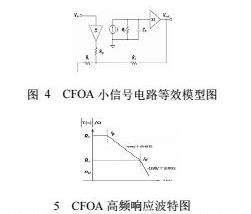
图3对应的小信号电路等效模型及相应的波特图分别如图4和图5所示,假设输入缓冲器的有限输出阻抗为RO,输入误差电流为i,通过选取合适电阻R1和R2,使其满足条件:RO<<R1,RO<<R2,据此根据运放负反馈原理,可以推出运放3dB闭环带宽频率fd的表达式为:fd=1/2πCPR2,考察fd的表达式,可以得出这样的结论:CFOA的闭环带宽取决于内部的主极点电容CP和外部反馈电阻R2,并且独立于增益设置电阻R1。独立于增益而维持带宽恒定的这种能力使得CFOA成为带宽可编程增益放大器的理想选择。由于闭环带宽与外部反馈电阻R2成反比,因此CFOA可以针对特定R2做优化,从最佳值开始增加R2的值,结果会降低带宽,而降低该值则可能导致振荡和不稳定,这是高频寄生极点所致。在实际应用中,即使在增益为10时,CFOA闭环带宽仍然大于100MHz,但在增益为1时的频率响应曲线可能会出现尖峰现象,其主要原因是反相输入端存在杂散电容,不过可以通过牺牲带宽来减少这种尖峰现象,具体方法是使用一个略大的反馈电阻。
2.2 系统电路设计
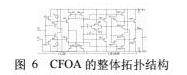
本文在文献[13]、[14]基础上设计的CMOS电流反馈运算放大器由两部分组成,其整体电路图如图6所示。第一级是由M1-M8组成CCⅡ+。Z端是高增益节点,M5-M8构成比例镜像电流源,将流进或流出Vn端的电流等量传输至Z端,利用Z端的内部高阻抗将传送到的不平衡电流转换为高电压输出。第二级采用两级运放结构,电路各级均采用互补对称结构。电容Cc与反馈电阻Rf共同决定CFOA在闭环工作时的频带宽度。从Vn端到Z端,中间线性传输的物理量是电流,而且电流变化的幅值在理论上没有限制,这正是CFOA获得超高速特性的根本原因[12]。
CFOA有可调带宽和可调整的稳定度,反馈环路设定了闭环动态范围,并且会同步影响带宽和相位裕度。电流反馈的一个主要优点就是有很好的大信号带宽,基于反馈电阻的应用具有很高的压摆率和响应速度,使器件的大信号带宽非常接近小信号带宽。同时,由于固有的线性度,在处理高频大信号时也可以获得低的失真。图6所示的电流反馈运算放大器,完全采用CMOS架构,因为CMOS是电压控制性元件,输入回路中没有电流,因此输入阻抗几乎无穷大,可以看作输入开路,这使得CFOA在处理高阻抗信号时具有优势,特别是在高速视频信号调理方面性能卓越;另外,在静态条件下,CMOS电路由于PN结的反向偏置,几乎没有漏电流,因此在待机模式下几乎不消耗电力,非常适合电池供电的便携式场景应用。
在电路图6中,由M3和M4组成的源极跟随器作为CFOA的反向输入端,源于电流反馈效应,其电流噪声比较高,大约为20~30pA/√Hz,但是与超低噪声和超低温漂的VFOA相比较,CFOA的输入电压噪声非常低,一般小于2nV/√Hz,而且其反馈电阻也很小,基于多晶硅的扩散工艺,通常小于1kΩ。在单位增益时,CFOA的主要噪声源是流过反馈环路的反向输入端的噪声电流。20pA/√Hz的输入噪声电流和750Ω的反馈电阻在输出端产生约15nV/√Hz的电压噪声成为主要噪声源。当增益增加时,由输入电流噪声产生的输出电压噪声不会增加,此时,运放的输入电压噪声成为主要噪声源,输入噪声电流在输出端产生的噪声电压通过平方和的平方根形式折合到输入端使总的输入噪声电压极大降低。
3 仿真结果与讨论
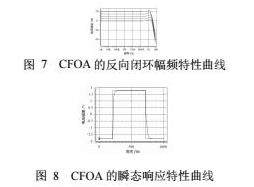
本文设计的CMOS电流运放,利用CSMC 0.5μm CMOS工艺模型参数进行了HSPICE仿真,图7是该运放的反向闭环特性,此时的电源电压是±1.8V, 偏置电流Ib为1μA,负载电容CL与频率补偿电容Cc均为1pF。当固定Rf =1KΩ,R1分别取100Ω、177.8Ω、316.2Ω、562.3Ω和1KΩ时,反相闭环增益分别为20dB、15dB、10dB、5dB和0dB,而带宽近似恒定,同相闭环增益与此类似,说明电路设计合理,体现了CFOA与增益设置关系不大的带宽特点[12]。CFOA的瞬态特性决定其SR,如图8是当放大器接成跟随器形式,并在同相端加±1.8V的阶跃信号,即跟踪电源电压时的响应波形图,由图可知,本文CFOA的SR为167.8V/μs,建立时间为87ns。根据偏置点分析,本文CFOA静态功耗仅为2.14mW。CFOA特有的高频率及大信号处理能力,使其适用于大信号、低失真的高性能视频系统及高速通信系统,也可以在高速数据放大器、快速D/A转换器、传输线驱动器及缓冲器中应用[12]。
4 结束语
本文的主要工作是从电源模块上对航拍无人机进行了低功耗的设计,使整个系统处于最佳的功率耗散状态,然后再分析了视频处理芯片内部的运放对高频信号增益带宽及功耗的影响,设计了LV/LP CMOS电流反馈运算放大器,并进行了HSPICE仿真。本文的创新点是在成像系统视频处理芯片中抛弃了传统的电压模式放大器结构,而采用电流模式的放大器结构,中间传输和处理的信号是电流,很好的解决了频带对增益的限制问题,提高了信号的处理速度,具有重要的实际意义。
参考文献:
[1]Vinuesa R, Azizpour H, Leite I, et al. The role of artificial intelligence in achieving the Sustainable Development Goals[J]. Nature communications, 2020, 11(1): 233.
[2]晏磊, 廖小罕, 周成虎, 等. 中国无人机遥感技术突破与产业发展综述[J]. 地球信息科学学报, 2019, 21(04): 476-495.
[3]Park J Y, Kim S T, Lee J K, et al. Method of operating a GIS‐based autopilot drone to inspect ultrahigh voltage power lines and its field tests[J]. Journal of Field Robotics, 2020, 37(3): 345-361.
[4]Glock K, Meyer A. Mission planning for emergency rapid mapping with drones[J]. Transportation science, 2020, 54(2): 534-560.
[5]Gu Q, Fan T, Pan F, et al. A vehicle-UAV operation scheme for instant delivery[J]. Computers Industrial Engineering, 2020, 149: 106809.
[6]Huang S-H, Huang Y-H, Blazquez C A, et al. Solving the vehicle routing problem with drone for delivery services using an ant colony optimization algorithm[J]. Advanced Engineering Informatics, 2022, 51: 101536.
[7]Hassanalian M, Abdelkefi A. Classifications, applications, and design challenges of drones: A review[J]. Progress in Aerospace Sciences, 2017, 91: 99-131.
[8]Yang J, Ding Z, Wang L. The programming model of air-ground cooperative patrol between multi-uav and police car[J]. IEEE Access, 2021, 9: 134503-134517.
[9]段晓峰. Mp4音视频芯片中低压低功耗电流反馈运算放大器的设计[D]. 成都:西南交通大学, 2006: 16-34.
[10]Giustolisi G, Palmisano G, Segreto T. A 1.2-V CMOS op-amp with a dynamically biased output stage [J]. IEEE J Sol Sta Circ, 2000, 35(4) : 632-636.
[11]丰豪, 王雅洁, 赵柏树. 基于CFA的运算电路设计与仿真[J]. 电子技术应用, 2017, 43(06): 56-59.
[12]彭建华. 低压低功耗电流反馈运算放大器的研究与设计[D]. 成都:西南交通大学, 2008: 31-40.
[13]Pennisi S. High-performance CMOS Current Feedback Operational Amplifier[A]. IEEE Int Symp Circ and Syst [C]. Kobe, Japan. 2005, 1573 - 1576.
[14]石慧杰, 王卫东. 低压高驱动能力的CMOS电流反馈运算放大器[J]. 微电子学, 2011, 41(03): 323-326.
作者简介:彭建华,男,汉族,1981年生,湖北省荆州市人,西南交通大学微电子学与固体电子学专业硕士研究生毕业,中共党员,中国电子学会会员,电子元器件及材料专业高级工程师,汤逊湖科技创新智库专家,武汉市科创局科技评审专家库成员,武汉市江夏区高层次人才(D类市级领军人才),享受武汉市政府专项津贴专家,武汉英才计划(先进制造领域)入选者,科技期刊《智能制造》第一届青年编委,现担任武汉楚能新能源有限公司PACK研究院储能一院院长,主要从事新能源电动汽车电控系统及储能集装箱电池系统的研发设计与技术管理工作。

 京公网安备 11011302003690号
京公网安备 11011302003690号


