



- 收藏
- 加入书签

基于作战网格的陆战场空域需求自适应控制方法
 打开文本图片集
打开文本图片集
摘要:依据全球战场空间联合作战网格划设和编码,建立了以部队和空间网格为核心视角的监视模型;整理归类临机需求对陆战场空域正常使用的影响因素,根据空域、部队以及行动类型等优先级因素,对冲突的空间网格进行优先级计算,自适应处置临机需求带来的冲突;处置结果经上级审批后,自动分发给所属各部队同步更新,继续监视其空间网格使用情况。本文形成了“监视—处置—指挥”的闭环指控流程,能够有力支撑联合作战指挥控制,本文基于作战空间网格,能够简化处置算法,提高指挥系统的运行效能,提升作战指挥控制效率。
关键词:空间网格;冲突检测;冲突消解;自适应控制
空域需求自适应控制[1]主要是指在作战过程中,指挥机构依据空域使用筹划的结果,督促指导和约束限定各部队对空域的使用,使其在限定时间和空间范围内,按照时间次序遵循一定的规则与关系,相互配合,安全、有序、高效地使用空域,同时针对战场异常情况具备自适应调整和针对性处置的能力,推进作战进程实现既定作战目标。
目前我军在陆战场战术空域管控领域尚处于起步阶段,缺少有效的指挥控制手段,难以安全、高效、有序地按照筹划阶段规划结果使用空域;另一方面,原有空域使用需求通常采用二维区域(多边形、圆、扇形等)经纬度加高度层的方式表述,描述不直观,计算复杂。而对于现有空域冲突解脱方法大多数通过多面体的碰撞检测等算法实现,如目前比较常用的有基于扫描实体的算法[2]、应用闵可夫斯基和集与球面高斯映射相结合的方法[3]、保守前进算法及其改进算法以及线性连续碰撞检测算法[4]等,这些算法大多通过复杂的算术计算过程来判断空间的堆叠情况,虽然有较高的准确度,但是通常难以满足现阶段我军硬件资源的需求。
1 实现流程
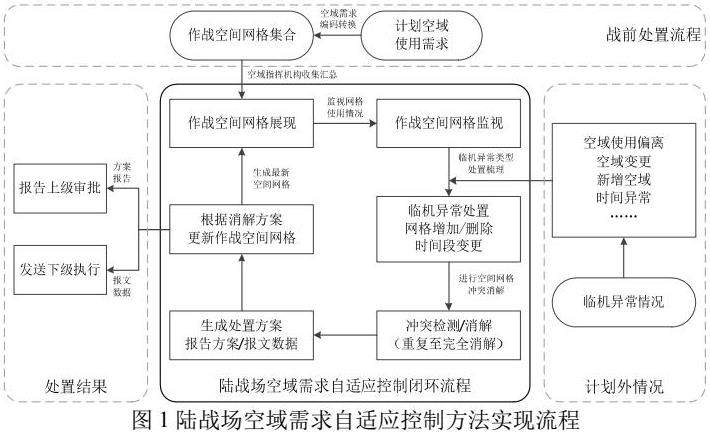
本文提供一种基于作战网格的陆战场空域需求自适应控制方法,形成监视—处置—指挥的闭环指控流程,主要包括以下步骤:
陆战场空域需求监视:依据全球战场空间联合作战网格划设和编码方法,各部队将陆战场空域使用需求转换为空间网格编码描述集合,空管指挥机构收集汇总并监视所属部队的空域使用需求。
临机需求快速处置:整理归类临机需求对陆战场空域正常使用的影响因素,主要包括空间网格的增加、删除以及时间段变更,当临机需求产生了空域冲突后,根据优先级因素对冲突的空间网格进行优先级计算,根据计算结果自适应处置临机需求带来的冲突。
控制方案生成发布:将最新的部队空域使用需求集合输出为控制方案与数据报文,经过上级空管指挥机构的审批同意后,自动将数据报文分发给所属各部队同步更新,继续监视其空间网格使用情况。
其处理流程图如下图1所示。
2 空域需求收集
依据全球战场空间联合作战网格划设和编码方法[5],将全球作战空间划分为带有唯一编号的基本单元[6],各部队将陆战场空域使用需求的经纬度、高程范围映射到空间网格上,将空域使用需求转换为的编码集合描述。空间网格具备位置属性,结合时间属性,即为空域使用需求编码集的最小单元,陆战场空域使用需求即可描述为该单元的集合。空管指挥机构收集汇总所属部队所有空域使用需求,即可得到作战空间网格占用特点时间序列的集合。
各部队将陆战场空域使用需求的经纬度、高程范围映射到空间网格上,将空域使用需求转换为的编码集合描述。空间网格具备位置属性,结合时间属性,即为空域使用需求编码集的最小单元,表示为E:
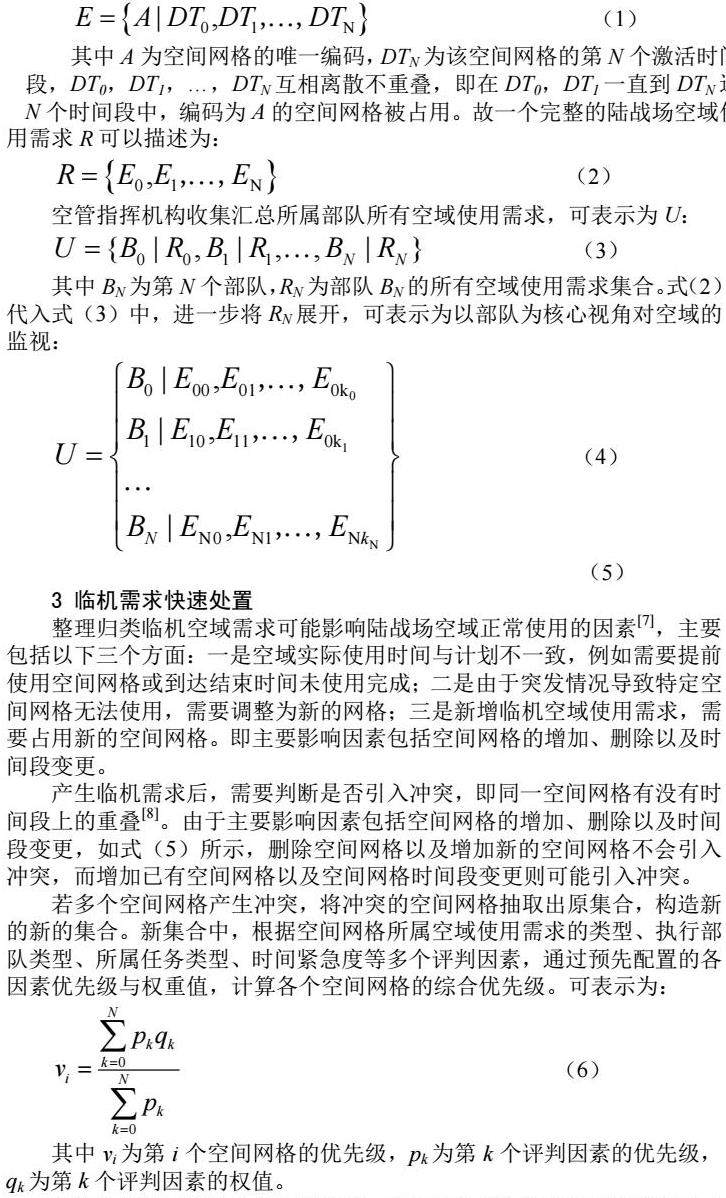
其中A为空间网格的唯一编码,DTN为该空间网格的第N个激活时间段,DT0,DT1,…,DTN互相离散不重叠,即在DT0,DT1一直到DTN这N个时间段中,编码为A的空间网格被占用。故一个完整的陆战场空域使用需求R可以描述为:
空管指挥机构收集汇总所属部队所有空域使用需求,可表示为U:
其中BN为第N个部队,RN为部队BN的所有空域使用需求集合。式(2)代入式(3)中,进一步将RN展开,可表示为以部队为核心视角对空域的监视:
3 临机需求快速处置
整理归类临机空域需求可能影响陆战场空域正常使用的因素[7],主要包括以下三个方面:一是空域实际使用时间与计划不一致,例如需要提前使用空间网格或到达结束时间未使用完成;二是由于突发情况导致特定空间网格无法使用,需要调整为新的网格;三是新增临机空域使用需求,需要占用新的空间网格。即主要影响因素包括空间网格的增加、删除以及时间段变更。
产生临机需求后,需要判断是否引入冲突,即同一空间网格有没有时间段上的重叠[8]。由于主要影响因素包括空间网格的增加、删除以及时间段变更,如式(5)所示,删除空间网格以及增加新的空间网格不会引入冲突,而增加已有空间网格以及空间网格时间段变更则可能引入冲突。
若多个空间网格产生冲突,将冲突的空间网格抽取出原集合,构造新的新的集合。新集合中,根据空间网格所属空域使用需求的类型、执行部队类型、所属任务类型、时间紧急度等多个评判因素,通过预先配置的各因素优先级与权重值,计算各个空间网格的综合优先级。可表示为:
其中vi为第i个空间网格的优先级,pk为第k个评判因素的优先级,qk为第k个评判因素的权值。
将各个空间网格按照优先级排序,取出最高优先级空间网格推迟或提前时间,使其在时间尺度上与原集合空间网格离散不重叠,若该网格经变更后时间段小于预先设置的阈值,则删除该时间段,否则抽出加入回原集合。重复该步骤,直至新集合为空。
结论
本文提出的一种基于作战网格的陆战场空域需求自适应控制方法,研究了网格体系下的空域冲突检测,以及如何将存在的空域冲突进行迭代消解的工作,能够有力支撑现阶段我军部队联合作战指挥控制需求,相较于传统的算法,基于作战空间网格划分能够简化处置算法,提高指挥系统的运行效能,提升作战指挥控制效率。
参考文献:
[1]金欣.指挥控制智能化现状与发展[J].指挥信息系统与技术,2017,8(4):10-18.
[2]王季,翟正军,蔡小斌. 分布式虚拟环境中基于扫描体的碰撞检测研究[J].计算机工程,2007(15):55−57.
[3]徐芝琦,陈志杨,叶修梓,等.基于扫描跟踪元的快速碰撞检测[J].计算机辅助设计与图形学学报,2008(11):1417−1424.
[4]张应中,范超,罗晓芳.凸多面体连续碰撞检测的运动轨迹分离轴算法[J].计算机辅助设计与图形学学报,2013,25(1):7−14.

 京公网安备 11011302003690号
京公网安备 11011302003690号


