



- 收藏
- 加入书签

基于机器视觉的工业机器人精准定位与抓取技术研究
 打开文本图片集
打开文本图片集
摘要:机器视觉技术是计算机视觉技术的一个重要分支,它利用计算机摄像头采集被摄物体的图像,再运用图像处理技术和模式识别技术来提取被摄物体的特征,进而根据这些特征对图像进行处理和分析,提取出物体的有关信息,最终实现对目标物体的识别、定位、跟踪和测量。而在工业机器人的工作过程中,也可以运用机器视觉来对工件进行定位和抓取。本文首先介绍了工业机器人系统组成以及其应用领域,然后重点探讨了基于机器视觉的工业机器人精准定位与抓取技术,最后介绍了该技术在工件定位及抓取中的实际应用,为工业机器人应用领域提供参考。
关键词:机器视觉;工业机器人;精准定位;抓取技术
1.工业机器人系统组成及其应用领域
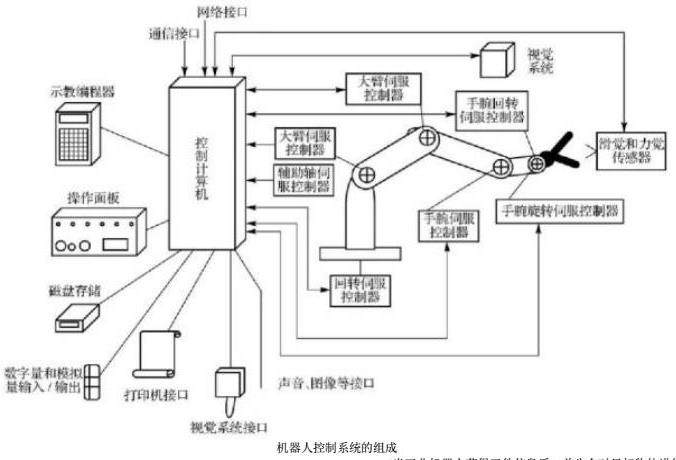
工业机器人的系统组成包括三个主要部分:控制系统、驱动系统和机器人本体,其中控制系统是工业机器人的核心组成部分,其作用是控制工业机器人的运行。驱动系统由电动机、减速器、执行机构和动力装置等部分组成,它是工业机器人的动力来源。而工业机器人本体则包括机械结构、电气结构和控制系统等部分,它是工业机器人的具体表现形式,它直接决定了工业机器人的工作性能和应用效果。
工业机器人在现代工业生产中具有广泛的应用,其主要应用领域有以下几个方面:一是在食品、医药、化妆品等领域,通过使用工业机器人来实现自动包装和分拣等作业;二是在冶金、采矿等领域,利用工业机器人来完成危险作业任务;三是在电子加工、纺织生产等领域,通过使用工业机器人来代替人工完成一些重复性较强的作业任务。此外,还有一些其他的应用领域,如汽车制造、冶金铸造等行业。总而言之,工业机器人在现代工业生产中扮演着越来越重要的角色,其应用领域也越来越广泛。
2.工业机器人视觉定位原理
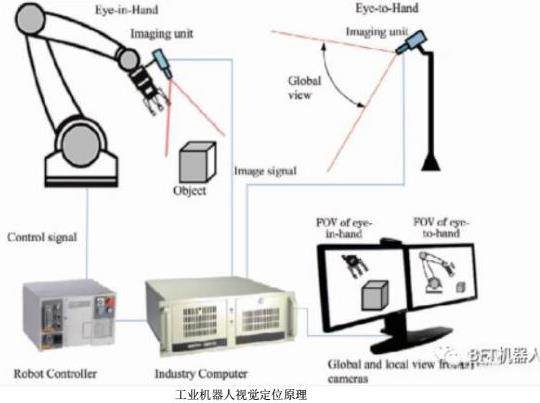
工业机器人视觉定位系统一般包括两部分,一是工业机器人,二是相机。其中,工业机器人主要用于工件的抓取和搬运,而相机则主要用于工件的识别与定位。其中,相机拍摄到的图像是通过计算机图像采集卡进行数据采集的,而计算机图像采集卡则是一种具有强大数据处理功能的多媒体卡。
当工业机器人获得工件信息后,首先会对目标物体进行定位,然后根据目标物体的几何特性、目标物体的颜色、形状等信息来确定工件在机器人坐标系中的位置;最后,机器人根据自己获得的工件信息和坐标系中工件的位置来对目标物体进行识别和定位。其中,在识别定位阶段中,需要进行图像预处理、目标物体特征提取、空间位置计算等步骤,这些步骤都是为了提取出工业机器人与目标物体之间的空间位置关系。
3.视觉定位系统软件开发
为了便于机器人实现对工件的定位,在系统软件设计上要注意以下几点:编程语言采用C++。C++是目前国际上使用最广泛的程序设计语言之一,在程序设计上具有很高的效率和可靠性;采用模块化设计思想。为了便于软件的扩展,可将系统划分为若干个模块,每个模块又可划分为若干个子模块。子模块之间采用类内的继承关系,方便程序的维护和扩展。在系统软件开发中,要充分利用面向对象技术,在C++语言中实现视觉定位功能的界面化;软件的主要功能是根据图像处理程序获取到的信息,计算出工件的位置、尺寸等数据,并将这些数据发送给工业机器人控制器,使其根据这些数据采取相应的行动。由于工业机器人控制器和相机之间是通过串口通信来进行数据传输的,因此软件编程采用C++语言进行编写,并设计了相应的通信接口函数和通信协议。采用 LabVIEW软件进行开发。LabVIEW是美国 NI公司开发的一款面向对象编程工具,具有很好的灵活性和可扩展性。
4.图像预处理和坐标系转换
图像预处理就是指将图像转换为数字形式,或者将数字形式的图像转换为模拟形式,或者将模拟形式的图像转换为数字形式。图像预处理就是通过对采集到的原始图像进行各种数学变换,从而达到增强图像信息,提高图像质量的目的。常用的图像预处理方法包括:平滑滤波、中值滤波、开运算和闭运算等。
5.目标物体识别与定位
基于机器视觉的工业机器人精准定位与抓取技术是一种自动识别和定位工件的技术,在工件加工过程中,利用机器视觉技术对工件进行识别和定位,根据工件的位置信息和方向信息对工件位姿进行调整,从而实现对工件位姿的精确控制。
工业机器人在进行精准定位时,主要通过两个方面来实现:一是对被摄物体进行识别,二是对目标物体进行定位。其中,对于被摄物体的识别主要是通过机器视觉技术来实现的,在实际工作中,机器人通常都是在无人干预的情况下完成对工件的识别和定位。对于目标物体的定位,主要是通过机器视觉技术来实现的。所谓目标物体的识别与定位技术,就是在计算机中建立一个三维模型库,这个模型库包含有大量的图像信息和相关属性信息。当工业机器人获取到需要抓取的工件图像后,首先利用图像处理技术提取出目标物体在该工件图像中的相关特征信息,并将这些特征信息输入到计算机中建立起一个三维模型库。
6.结语
基于机器视觉的工业机器人精准定位与抓取技术具有诸多优点,它不仅可以替代人在危险环境下作业,还可以实现自动化生产。但是,基于机器视觉的工业机器人精准定位与抓取技术在实际应用中仍存在一些问题,主要表现为以下几个方面:首先,由于工业机器人体积大、重量重,这会导致其运动灵活度降低;其次,由于工业机器人在工作过程中的环境复杂多变,这就要求其具有良好的抗干扰能力和适应能力;再次,由于工业机器人工作过程中需要长时间处于相对封闭的工作环境中,这就要求其具有较强的适应能力;最后,由于工业机器人在工作过程中需要长时间保持高度紧张状态,因此其在作业过程中容易疲劳。
参考文献:
1.江舟.基于深度学习的工业机器人精准抓取算法研究[J].太原学院学报(自然科学版),2022,40(04):42-46.
2.谭建勋,极端恶劣工况下的工业机器人关键技术研究.黑龙江省,哈尔滨博实自动化股份有限公司,2023-06-29.
3.王少愚.基于多传感器的工业机器人故障信息采集平台研究[J].无线互联科技,2023,20(20):30-32+36.

 京公网安备 11011302003690号
京公网安备 11011302003690号


