



- 收藏
- 加入书签

数字孪生技术在智能网联仿真平台的设计与实现
 打开文本图片集
打开文本图片集


摘要:随着第五次工业革命的兴起,智能网联已成为全球研究的焦点之一。在这一背景下,数字孪生作为一种融合信息空间与物理空间的新技术扮演着至关重要的角色。本文以"信息物理融合"为设计思路,在数字孪生的理论基础上,构建了一个原型系统。计划通过详细阐述动态和静态两个方面,致力于打造一个能够高度映射真实物理行为的虚拟仿真环境。同时,将从物理空间、虚拟空间和云端这三个角度进行量化分析,深入剖析智能网联平台的机理架构,为智能网联数字孪生平台的研发提供有益参考。
关键字:智能网联;数字孪生;物理空间;虚拟空间
1.引言
随着人工智能、云计算、物联网等新一代信息技术的快速发展,全球各国正纷纷推出制造战略,如“工业4.0”、“中国制造2025”,旨在适应第五次工业革命的到来。尽管这些战略是在不同的背景下提出的,但它们的共同目标都是推动智能制造,以满足社会化、个性化、服务化、智能化和绿色化的需求。智能网联产业拥有庞大的市场规模、强大的带动效应和高度的国际化,吸引了大量资金、技术和人才的投入。在这种趋势的推动下,智能网联必将成为新一轮科技革命和各国竞相发展的重要目标。
在2023年举办的第二十二届中国互联网大会上,由中国互联网协会主办,腾讯数字孪生产品部/自动驾驶业务总经理苏奎峰曾强调智能网联的构建与虚实结合的数字孪生具有诸多相似之处错误!未找到引用源。。数字孪生技术作为实体世界和虚拟世界之间的桥梁,已在学术界和产业界广受关注。与此同时,物联网技术的进步也使得数字孪生在智能交通和自动驾驶领域展现出了广泛的应用潜力。
目前,国内外学者在智能网联数字孪生领域已经取得了一系列显著成就,其研究重点主要集中在各类自动驾驶测试领域。例如,Wang等错误!未找到引用源。人提出了一种通用互联车辆数字孪生系统框架,该框架首次将数字孪生技术引入自动驾驶测试领域。张宇琳等错误!未找到引用源。验证了数字孪生技术在异质交通流中监测不同突发事件和交通情况的稳定性。此外,Liao等错误!未找到引用源。利用V2C数字孪生方法成功开发了一种合作式匝道并线系统,并通过现场实验验证了系统在速度、污染物排放和燃料效率方面的有效性。而YANG等错误!未找到引用源。则提出了一种新方法,利用数字孪生技术结合物理车辆和虚拟车辆进行多车实验,以解决可用车辆不足的问题。这些研究不仅拓展了数字孪生技术的应用范围,同时为智能交通和自动驾驶系统的进一步优化提供了有益的思路和实践经验。
因此,本文基于数字孪生技术开发了一个原型系统,旨在展示数字孪生在建立智能网联平台方面的全流程。首先,详细描述了建立基于智能网联测试场所的数字孪生仿真平台的设计方案,以还原实际场景。其次,深入介绍了在数字孪生特性下,平台的设计要求以及系统的组成和功能。最后,对整个过程进行了总结。
2.基于数字孪生的智能网联平台设计思路
为了更好地模拟实际智能网联测试场景,本项目秉承“信息物理融合”理念,致力于打造数字孪生智能网联平台,实现对实体的全方位数字化、实时监控和智能化管理。考虑到资金与安全等重要因素,设计方案将从动态和静态两个方面进行入手。在动态方面,通过收集来自不同来源的数据,并融合动态数据驱动的仿真技术,使数字孪生模型能够准确模拟并反映实际系统的实时动态行为。而在静态方面,将运用3Ds Max软件和几何数据建模技术来构建平台,以确保系统的稳定性和可靠性。
2.1基于3Ds Max的几何数据建模技术
作为一款强大的三维建模和渲染软件,3Ds Max广泛应用于多个领域,具备灵活的场景编辑功能,能够通过材质、纹理、光照和渲染等特性,打造出与真实场景相媲美的虚拟环境。总体而言,3Ds Max的建模方法主要包括特征建模、实体建模和体积建模。在特征建模中,重点在于通过定义和编辑模型的关键特征和几何元素来构建模型;实体建模则着重于在三维空间中创建具有实体属性的物体;而体积建模则将模型表示为三维像素阵列,通过设定参数可直接进行编辑和调整。因此,本文利用3Ds Max的多样化建模方法,使其能够更有效地塑造出精美细致的虚拟世界。
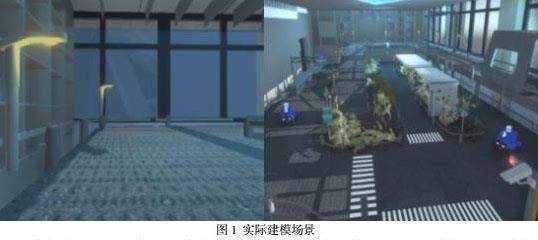
根据图1展示,在智能网联场景建模过程中,主要以特征建模和实体建模为主要方法。利用面向计算机图形学和数学模型的几何数据建模技术,通过曲线、直线、曲面、多边形和三角形等几何数据,根据相应规则进行组合,从而构建出虚拟场景的几何轮廓。这种方法能够有效地呈现出智能网联场景中的各种特征和实体,为建立逼真的虚拟环境提供了重要的基础。
智能网联场景建模具体步骤如下:
1)提取关键点:根据实际场景信息,提取关键点,包括三维坐标和场地的地形信息等。将获取的真实场景信息按比例缩放,以确保虚拟场景的比例和尺寸与真实场景一致。
2)设置模型元素:对道路、智能网联微型车、基础设施等元素进行设置,包括添加适当的材质、纹理、照明等效果,以使它们在虚拟环境中更加真实、贴近实际场景。
3)添加物理属性:设定碰撞、反射和阴影等属性结构,以在虚拟自然环境场景中模拟真实的物理现象,如公路行驶、颠簸和高速行驶等情景。
2.2 基于多源异构数据孪生驱动仿真
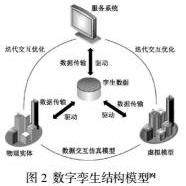
作为一种整合多物理场景、多尺度和多概率仿真模型的技术,数字孪生能够充分利用物理模型、传感器数据以及历史数据等资源,以精准地反映实体的功能、实时状态和发展趋势。Tao等结合物联网、大数据等领域的研究成果,将数字孪生技术建立成以孪生数据为核心、物理实体、虚拟模型和服务系统相互迭代、交互优化的五维模型错误!未找到引用源。。陶飞等错误!未找到引用源。进一步扩展了这一模型,形成了六个数字孪生驱动的应用基本准则。
基于数字孪生技术的应用基本准则,本文专注于数字孪生智能网联平台动态数据的优化和采集。在实际智能网联微型车上安装各种传感器,利用仿真技术对动态数据进行整合,将来自不同传感器的多源异构数据集成到一起,并整合车辆与基础设施的几何、物理、行为和规则信息。通过数据清理、数据集成、数据统合和物理与虚拟双向镜像处理,建立融合后的多元异构孪生模型,以提取关键特征和模式。同时,将所建立的模型应用于实时监测物理实体的状态,以全面了解和控制智能网联场景中的动态信息。
在运行过程中,通过持续采集新的数据并更新模型,确保模型能够准确反映实体的当前状态,并实现数据之间的时空同步和准确对齐。在实际场景中,微型智能网联车接收虚拟空间的执行指令和信号,经过分析和判断后执行相应的控制动作,并将车辆运动信息反馈回虚拟空间中。使得车辆的决策能力和控制能力能够实时动态地驱动全方位模拟和监测,从而实现对智能网联车辆行为的实时跟踪与管理。
经过上述设计思路,数字孪生智能网联平台在动态和静态两个方面实现了对实体的全面模拟、监测和管理,为智能网联场景的研究和测试提供了有力支持。通过结合动态和静态两个方面的设计,实现了更接近实际场景的数字化、智能化模拟,为智能网联场景的研究和测试提供了充分的支持和便利。
3.基于数字孪生驱动的智能网联平台机理框架
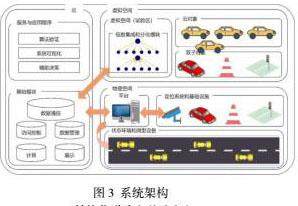
如图3所示,数字孪生作为一种参考模型,在本文中被狭义地定义为物理空间和虚拟空间两个组成部分,并通过辅助机制的云作为信息集成中心来联系这两个组成部分。通过强调物理空间和虚拟空间的差异,以及利用云作为信息集成中心,旨在消除干扰和不确定性,实现对偶优化。
1)物理空间:系统的布局呈微型交通场景形式,包含结构化道路和基础交通设施,如图2所示。在微型车的选择过程中,考虑了智能网联的特殊性质和资金因素,以及为了实现更精细的控制,微型车整合了机器人操作系统(ROS),从而具备自主进行环境感知、路径规划和信息共享等功能。为了确保对微型车的全面控制,系统需要满足以下要求:保证每辆车能够传输刹车状态和路段信息,以实现全车控制;确保控制频率高于5 Hz,以及时发现和纠正任何异常行为或潜在损害;车辆装备各种传感器和计算单元,具备自动驾驶系统的全栈功能,涵盖感知、决策和执行能力,如图4所示。
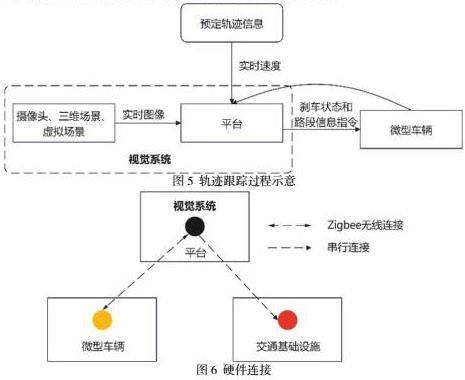
轨迹规划是微型车中最常用的控制方式之一。在相对稳定的测试环境中,系统预先设定了多种轨迹规划路径,包括公交、颠簸和高速等不同路况。为了实现精确的定位和方位测量,系统利用微型车内置的ROS中的传感器驱动程序以及摄像头、三维场景和虚拟场景等组件来构建强大的视觉系统。轨迹跟踪过程的示意图如图5所示,硬件连接结构如图6所示。
2)网络空间:在构建系统的网络空间之前,需要考虑几个方面。首先,网络空间应能够准确反映测试场所的运行状态。其次,网络空间应提供身临其境的人机界面体验。由于3Ds Max具有强大的功能和资源,因此本研究选择使用3Ds Max软件进行场景的三维建模和渲染,如图1所示。在网络空间中,建立映射车辆,主要用于反映微型车辆的运行状态。为此,映射车辆的坐标、速度和航向等参数需要根据来自物理空间的实时信息进行更新,以确保网络空间与实际场景保持同步。
3)云:该系统的主要目标之一是提供一个平台,用于评估各种算法或方法,而无需深入关注内部实施细节。设计云的初衷是满足对访问和计算的高要求。如图7所示,云通过收集物理空间和网络空间的数据,外部控制器或程序可以通过与云建立连接来访问系统的数据。云技术的应用使得系统具备高效的数据访问和处理能力,进一步促进了系统的智能化和灵活性,为各种算法或方法的应用提供了便利和支持。
4.总结
随着智能化、数字化和网络化的迅速发展,数字孪生在智能制造行业中的重要性日益凸显。通过数字孪生技术,可以有效解决智能网联在资金和安全等关键因素下所面临的挑战,实现全价值链的闭环反馈和持续改进。本文充分发挥了数字孪生的特性,通过在物理世界和虚拟世界上进行设计,详细探讨了实现数字孪生的关键技术和流程。在平台机理框架上,从物理空间、虚拟空间和云的角度阐述了对平台的要求。通过在云端建立连接物理世界和虚拟世界的多元数据和数字空间通道,以及反向控制优化通道,为实现“以虚控实”的目标奠定了基础。
参考文献:
[1]苏奎峰. 实时数字孪生,助力智能网联创新发展[J]. 互联网天地, 2023, (08): 57-59.苏奎峰在《互联网天地》杂志2023年第08期的文章中提出了实时数字孪生对智能网联创新发展的助力。
[2]赵祥模教授领导的“国家重点研发计划项目”(2021YFB2501200)团队在《交通运输工程学报》中发表了题为《自动驾驶测试与评价技术研究进展》的文章。
[3]张宇琳、尚可、张飞舟撰写了题为《基于数字孪生技术的异质交通流安全性研究》的文章,发表在《北京大学学报(自然科学版)》2022年第58卷第05期888-896页。
[4]LIAO X, WANG Z, ZHAO X, HAN K, TIWARI P, BARTH M J, WU G等人在《IEEE智能交通系统交易》杂志上发表了题为《基于车辆到云通信的数字孪生方法的合作匝道合并设计与现场实施》的文章,发表于2021年,第23卷第5期,页码为4490-4500。
[5]YANG C, DONG J, XU Q, CAI M, QIN H, WANG J, Ll K等人在2022年IEEE/SlCE国际系统集成研讨会上发表了题为《多车辆实验平台:一种数字孪生实现方法》的论文,文章发表于纽约IEEE,页码为705-711。
[6]张宇琳、尚可、张飞舟等合著的《基于数字孪生技术的异质交通流安全性研究》一文刊登在《北京大学学报(自然科学版)》2022年第58卷第05期,页码为888-896。
[7]陶飞、刘蔚然、刘检华、刘晓军、刘强、屈挺、胡天亮、张执南、向峰、徐文君、王军强、张映锋、刘振宇、李浩、程江峰、戚庆林、张萌、张贺、隋芳媛、何立荣、易旺民、程辉等人在《计算机集成制造系统》杂志上发表了题为《数字孪生及其应用探索》的文章,发表于2018年,第24卷第01期,页码为1-18。
论文基金项目:重庆市科学技术局技术创新与应用发展项目 cstc2021ycjh-bgzxm0254

 京公网安备 11011302003690号
京公网安备 11011302003690号


