



- 收藏
- 加入书签

基于图像的城市轨道交通列车车钩对中检测系统设计
 打开文本图片集
打开文本图片集



摘要:本研究针对城市轨道交通列车车钩连挂对中检测问题,设计一种基于图像处理的车钩对中实时在线检测系统。使用车钩摄像机提取车钩高清图像,对图像进行预处理和边缘检测,基于Harris角点检测实现车钩定位,最后计算车钩偏角输出对中检测结果。实验表明,采集了1200张图像,在允许连挂场景中,检测准确率达到98.33%,而在禁止连挂场景中实现了100%的识别率,能够实现对车钩连挂状态的有效快速自动识别。
关键词: 城市轨道交通;车钩对中检测;图像处理
中图分类号: U279.2
Abstract: This study focuses on the problem of detecting the coupling alignment of urban rail transit train couplers, and designs a real-time online detection system for coupler alignment based on image processing. Using a coupler camera to extract high-definition images of the coupler, preprocessing and edge detection of the images, implementing coupler positioning based on Harris corner detection, and finally calculating the coupler deflection angle to output the centering detection result. The experiment showed that 1200 images were collected, and the detection accuracy reached 98.33% in the allowed coupling scene, while a 100% recognition rate was achieved in the prohibited coupling scene, which can effectively and quickly automatically recognize the coupling status of the coupler.
Key words: urban rail transport; coupling alignment detecting; image detection
0.引言
在城市轨道交通的运营中,车钩对中检测是列车连挂前的必要操作,其主要任务是确保相邻车钩在水平与垂直方向上的准确对中,以便顺利、安全地完成列车的自动或手动连接[1,2]。车钩对中检测的准确性不仅直接关系到列车对接的成功率,还影响列车运行过程中的安全性和稳定性。因此,精准的车钩对中检测是保障列车高效调度和安全运营的关键一环[3]。
目前,城市轨道交通系统中大部分的车钩对中检测依赖于人工操作,主要通过目测确认车钩对中状态。然而,这种传统的人工检测方式存在诸多局限性。人工检测高度依赖操作人员的经验水平,且容易受到操作环境(如光线、天气等)以及人员状态(如疲劳度等)的影响,导致检测结果不稳定[4]。此外,人工检测还可能带来一定的安全隐患,尤其是在列车对接频繁、时间要求严格的场景下,人工检测的局限性更加明显。
为提升车钩对中检测的准确性和安全性,越来越多的研究工作开始关注基于图像的在线检测方法[5,6]。该方法通过安装在车钩附近的摄像头实时采集图像,再结合图像处理或深度学习算法,自动分析车钩是否对中。相较于传统人工检测,基于图像的在线检测系统在复杂环境下表现稳定,能够提供更高的检测精度和效率[7,8]。
本文结合城市轨道交通列车车钩对中检测的具体需求,设计了一种基于图像的列车车钩实时对中在线检测检测系统,通过图像处理方法提取车钩边缘特征,计算车钩偏转角度,确定连挂车钩相对位置,以实现车钩对中的实时在线检测,并为列车安全对接提供技术支持。
1.车钩对中检测系统设计
1.1系统架构
车钩对中检测系统由车载主机、车钩摄像机、三维激光雷达构成。其中车钩摄像机和三维激光雷达组成车钩对中检测系统的感知单元,车载主机集成系统的边缘计算单元,感知单元将感知到的车钩信息通过传输单元传输给车载主机,在线计算一组连挂-解编车钩的相对位置,当计算结果满足车钩连挂的安全限制条件时,发送连挂安全指令,实现列车车钩在线自动对中检测并连挂,相较于人工检测,既提升了检测精度,又提升了检测效率,节约了时间和人力成本。
1.2 系统组成
1.2.1 车载主机
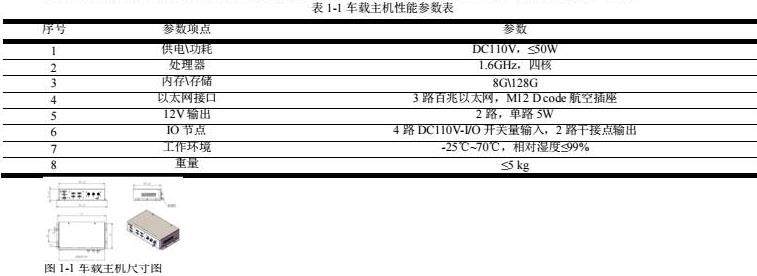
车载主机负责检测车钩和控制IO输入输出,完成和列车网络的数据通信,如图1-1所示,其性能参数如下表1-1。
1.2.2车钩摄像机
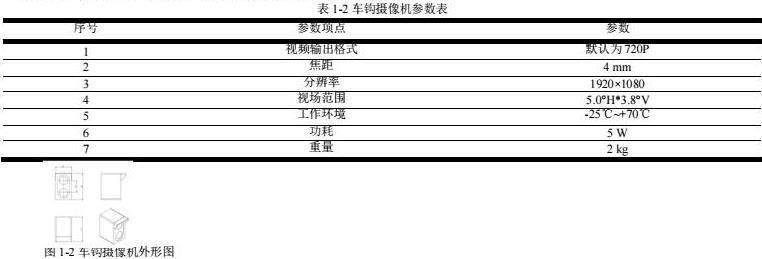
车钩摄像机采用金属CNC加工外壳,坚固耐用,做特殊加强和缓冲处理。电路设有多种保护功能,包括极性反接保护、过热保护、浪涌保护等,充分适应地铁车辆的严酷应用场景。摄像机负责0~8米区域检测。
2.基于图像的车钩对中检测
2.1图像采集与预处理
首先通过安装在列车车头的高分辨率车钩摄像机进行图像采集。摄像头应根据车钩的实际位置进行合理布置,以确保捕捉到车钩的清晰图像。可能安装的位置如图2-1所示。图像采集过程中,需考虑光照条件和环境因素对图像质量的影响,因此在不同的光照条件下,需动态调整摄像头的曝光时间和增益参数。
在采集到的原始图像上,进行预处理以提高后续处理的效率和准确性。预处理包括图像去噪、增强对比度、灰度化以及透视矫正等步骤。使用高斯滤波去除图像中的随机噪声。通过对比度增强以突出车钩的特征,使其在后续的定位和分析中更加明显。透视矫正旨在消除因摄像头与车钩之间视角变化引起的透视畸变。由于车钩的形状为矩形,透视畸变可能导致车钩在图像中看起来变形,影响后续的定位准确性。通过对原始图像进行透视变换,将车钩区域矫正为标准的矩形,可以确保特征提取和定位算法的有效性,从而提升检测精度。最终,经过预处理的图像将为车钩定位提供更清晰的视觉信息。
2.2车钩定位
在图像预处理完成后,基于图像处理对车钩进行定位。由于车钩在图像中呈现为明显的矩形特征,因此可以利用特征点检测算法进行精准定位。此过程主要包括边缘检测和轮廓提取。
首先,通过Canny边缘检测提取图像中的边缘信息,随后应用霍夫变换等方法识别图像中的直线特征,以获取车钩的边缘轮廓。接着,基于Harris角点检测[9]的方法来提取车钩的关键特征点。Harris角点检测是一种经典的特征点检测算法,能够有效识别图像中的角点特征。通过计算图像中每个像素的自相关矩阵,Harris角点检测可以识别出具有显著强度变化的区域,这些区域通常对应于车钩的边缘和角点。在提取出车钩的角点后,利用这些特征点进行矩形拟合,从而确定车钩的中心位置和长宽比例。基于Harris角点检测的定位方法相比传统的特征匹配技术具有更高的准确性和鲁棒性,能够有效应对不同的环境条件。
2.3偏角计算
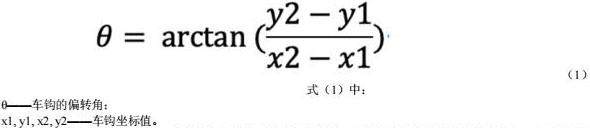
根据车钩的几何模型和成像原理,建立车钩在图像中的位置与其实际偏角之间的映射关系。通过解析几何或标定得到的映射函数,将车钩在图像中的像素坐标转换为实际的偏角值。一种简易的计算方法为,假设车钩理想对中位置为坐标 (x0, y0),通过车钩定位步骤得到的实际位置为长方形的两个对角点 (x1, y1) 和 (x2, y2),则可以通过以下公式计算偏转角:
式(1)中:
θ——车钩的偏转角;
x1, y1, x2, y2——车钩坐标值。
该计算方法利用矩形几何特征,使偏转角的计算更加准确且高效,不仅提供了车钩的对中状态信息,还可用于进一步的控制和调整,以确保列车车钩的顺利连挂。
2.4检测指标与误差计算
本文所设计的车钩对中在线检系统可实现如下检测指标。
(1)测量范围:相机视角中轴线-45°~+45°;
(2)角度测量精度:0.5°;
(3)角度测量分辨率:0.1°;
(4)角度测量频率:10Hz。
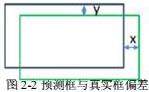
假设在目标检测中,车钩检测框尺寸与真实框尺寸一致,检测框与预测框在水平和竖直方向上的像素偏差分别为x和y,对检测结果的精度进行估算:
现场实际测量可知,目标像素尺寸约为380*190,IoU值需满足IoU = 交集面积 / 并集面积 > 0.8,才认为检测结果可信。解得:当x = 0时,不等式变为:-380y > -8022.22,解得y < 21.11;当y = 0时,不等式变为:-190x > -8022.22,解得x < 42.22;因此,可以估计当预测框和真实框的水平偏差小于42像素,竖直偏差小于21像素时,在预测框和真实框尺寸一致的情况下,IoU值可以高于0.8。
可得角度计算误差:。
考虑mIoU值偏低和图像质量问题等实际情况,左右偏转角检测精度可达0.5°。
2.5检测指标与误差计算
使用车钩摄像机安装在车头拍摄视频,拍摄场景分为允许连挂状态和禁止连挂状态,如图2-3所示,分别提取960张和240张共1200张图像,输入车钩对中实时在线检测系统,检测结果如表2-1所示。
从表2-1可以看出,在允许连挂的场景中,系统正确识别了944张图像,产生了16张误识别,准确率达到98.33%。在禁止连挂的场景中,系统完美识别了所有240张图像,没有产生误识别,准确率达到100%.实验结果表明检测系统在车钩两种状态下均具有较高的可靠性,能够有效防止车钩错误对接。图像检测平均速度达35.8帧每秒,能够满足系统实时性要求。
3.结语
本研究设计了一种基于图像的城市轨道交通列车车钩对中在线检测系统。使用基于图像处理方法,提取车钩高清图像,对图像进行预处理和边缘检测,基于Harris角点检测实现车钩定位,最后计算车钩偏角并根据判断阈值输出连挂可行性。通过实验验证,系统在车钩对接的两种状态下表现出色。在允许连挂场景中,系统的准确率达98.33%,在禁止连挂场景中实现100%的识别率。实验结果表明,所提出的检测方法具有良好的可行性、高精度和在线检测能力,能够有效支持列车安全连挂。
参考文献
[1] 纪玉清,欧冬秀,常鸣,等. 列车虚拟编组应用需求及关键技术研究 [J]. 城市轨道交通研究, 2022, 25 (11): 57-61.
[2] 付翔,王岳,王小中,等.复兴号高速动车组便携式智能化车钩检测装置[J].铁道车辆,2022,60(01):112-115.
[3] 马青春,郭燕辉,李雪飞,等. 基于灵活编组无人驾驶车辆车钩连挂技术概述 [J]. 智慧轨道交通, 2022, 59 (04): 67-69+81.
[4] 郭忠峰,张渊博,王赫莹,等.深度学习目标检测算法在货运列车车钩识别中的应用[J].铁道科学与工程学报,2020,17(10):2479-2484.
[5] Zhao W, Yao X, Wang B, et al. A Visual Detection Method for Train Couplers Based on YOLOv8 Model[C]//International Conference on Advances in Construction Machinery and Vehicle Engineering. Singapore: Springer Nature Singapore, 2023: 561-573.
[6] 沈拓,谢远翔,盛峰,等.基于视频的轨道车辆自主定位方法研究[J].同济大学学报(自然科学版),2024,52(02):174-183.

 京公网安备 11011302003690号
京公网安备 11011302003690号


