



- 收藏
- 加入书签

船用电动锚绞机电气控制系统介绍
 打开文本图片集
打开文本图片集

摘 要:航海装备是我们国家的重要产业,与经济发展密切相关,对稳经济、稳就业、稳增长起着关键支撑作用。本文依据某品牌船用甲板机械电动锚绞机,经过大量的设计优化,以及详细追溯客户的使用情况后,总结归纳了常用的电气控制系统,旨在为船用电动锚绞机设计提供一些参考。
关键词:航海装备;甲板机械;电动锚绞机;电气控制系统
O 引言
国际及国内航运市场的繁荣为船舶工业发展提供了有力的保障。但设计能力落后、配套产业发展滞后、自足创新能力不强是制约我国船舶工业发展的主要因素。在全球一体化的快速推进过程中,把握机遇与挑战,提高船舶配套设备的快速优质发展是我们的首要问题。
作为船舶中必不可少的甲板机械,锚绞机控制技术也在不断地发展推进,拥有更精确控制且自动化程度更高的电动锚绞机开始广泛应用。本文从实际交付使用项目介绍电动锚绞机的电气控制系统,希望能给船舶配套产业的优质发展做出一点贡献。
一、驱动方式的选择
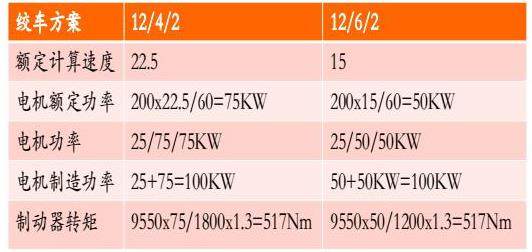
1.1变极方案选择
12/4/2 极电机,额定转速约为600/1800/3600 rpm/min
12/6/2 极电机,额定转速约为600/1200/3600 rpm/min
相关公式 T=9550P/r,r=60f/p
系泊绞车方案:对于额定15m/min,轻载30m/min 等1:2速比要求的绞车,12/4/2的方案无疑是最合适的。
如果额定15m/min,轻载45m/min,项目该选择哪种方案?
以实际项目举例,绞车额定拉力为200KN。
结论:成本差距不大,12/6/2功率小,电流小,因此断路器与接触器选型可偏小。
结论:相比之下12/6/2方案电机功率与制动器转矩更大,因此电机成本更高,低速速度也更高,但相对而言传动比要更小。
变极方案总结论:纯绞车或绞车功率较大与锚机功率的组合机中,2种方案几乎等同。而纯锚机或锚机功率较大的组合机(如9w吨船型)12/4/2的方案更优。因此12/6/2电机在现有锚绞机方案需求中相对12/4/2没有优势。
1.2变频方案选择
4极电机,额定转速约为1800 rpm/min
6极电机,额定转速约为1200 rpm/min
相关公式T=9550P/r,r=60f/p
系泊绞车方案:对于额定与轻载为1:2速比的绞车,两种方案都是60hz/120hz,同样举例额定15m/min,轻载30m/min,额定拉力200KN,计算方式同变极方案
极对数为4方案的优势为同功率机座号小,制动转矩小,缺点是传动比大,相反,6极方案机座号大,制动转矩大,但传动比小。目前比较4极成本更占优势
系泊绞车方案:对于额定与轻载为1:3速比的绞车,技术上有三种方案,分别是4极40/120hz,4极60/180hz和6极60/180hz。
同样举例额定15m/min,轻载45m/min,额定拉力200KN来比较,计算方式同变极方案
结论:方案2由于高速时电机转速达到5400转,物理部件受限方案被淘汰,剩下6极方案具备低传动比与低功率优点,可降低变频器容量。是大部分品牌主流设计思路。但缺点在于绞车制动时间长,个别项目上有所体现。
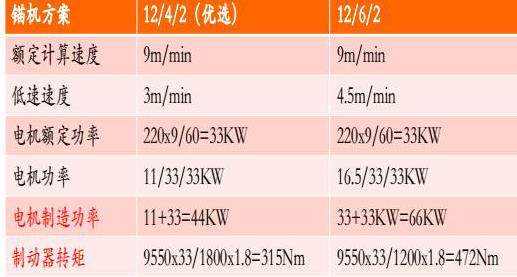
锚机方案:
由于锚机都是恒转矩控制,仅需考虑60hz的额定速度情况。因此与1比2速比的情况类似,4极方案的优势为同功率机座号小,制动转矩小,缺点是传动比大,相反,6极方案机座号大,制动转矩大,但传动比小。目前比较4极成本更占优势
因此,在纯锚机或锚机功率大的组合机中,4极电机方案占优,反之则6极方案占优。
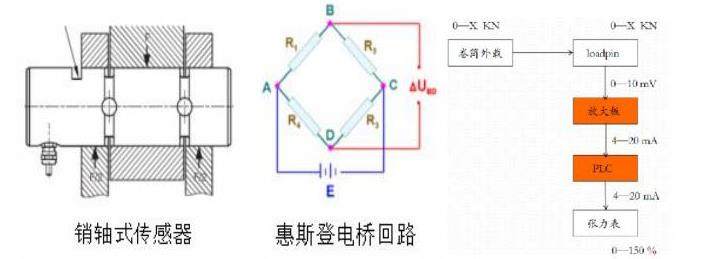
二、力传感器信号传输方式
常规设计原则:
1、采用固定量程load pin,常规为5KN,10KN,20KN
2、比例调整在放大板完成,PLC处理锚机/绞车的不同张力百分比换算
3、Load pin量程大于绞车1.2倍外载或锚机1.6倍外载
举例:绞车额定拉力150kn,经计算到load pin为6kn,锚机额定拉力220kn,经计算到load pin为5kn。
三、自动系泊控制逻辑
根据绞车工况需要,自动系泊张紧功能通常设置5个档位,20%,40%,60%,80%,100%。当缆绳张力超过20%以后,切换自动恒张力功能开关,选择任一档位,即启动恒张力模式。恒张力模式启动后,在停机状态下实际张力高于目标值12%时,绞车启动放缆,至大于目标值5%时停机。或者在停机状态下实际张力低于目标值12%时,绞车启动收揽,至小于目标3%时停机。
如此绞车处于自张紧模式下,实际张力会在预设值的上下一定合理范围内移动,既保持了张力的平稳安全,又保证电机不用频繁启动,提高能效。
四、锚绞机运行限制工况
锚绞机运行速度的特殊限制情况:
客户使用点动按钮控制,锚绞机控制电机仅以一速运行,点动按钮仅用于锚机、绞车离合器的打开与闭合;在自动张紧模式触发中,绞车电机仅以一速运行;在扭力传感器失效时,收缆方向电机仅能一速运行,放缆方向速度无限制;锚机模式下,收、放锚链方向均无三速运行,仅有一速、二速;锚机模式下,链长小于五米时只能以一速收链;绞车模式下,当外载大于25%时,电机不能在三速运行;电机在三速运行时,控制主令突然回零,电机依然遵循三速降至二速降至一速然后停机顺序运行;电机在二速运行时,控制主令突然回零,电机依然遵循二速降至一速然后停机顺序运行。
锚绞机运行转矩的特殊限制情况:
绞车运行在一速二速下负载张力限制为110%,负载低于98%解除限制
锚机链长大于5米时一速二速下负载张力限制为150%,负载低于132%解除限制
锚机链长小于5米时一速下负载张力限制为80%,负载低于70%解除限制
点动按钮负载张力限制为25%,负载低于22%解除限制
Override功能可以旁路链长5米内的限制,限制时间为单次30分钟
点动按钮控制连续运转16秒停机,自动张紧模式连续运转10秒停机
五、锚绞机报警点
六、人机界面(Human Machine Interface)
PLC控制器使用灵活,功能强大,加上安全可靠的显著特性已经广泛应用于船舶配套产业。HMI(人机界面)触摸屏的使用更受到客户的青睐,HMI通过工业以太网和PLC的通讯,数据传输稳定可靠,使用者可以从屏幕界面确认设备的状态,设备故障停机后,客户可以查询到故障信息文本以及发生故障的时间,对于排查故障和分析原因提供了有力支撑。
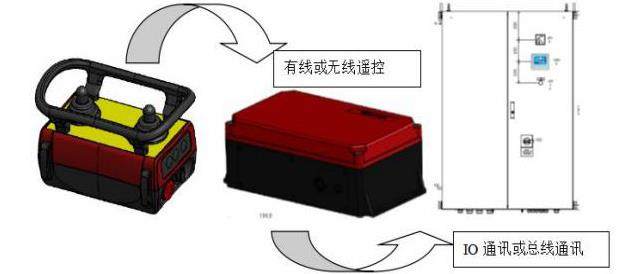
七、遥控控制
遥控控制通讯方式:
注意事项:
无线操作距离(发射器与接收器距离)标称为100米,即两设备之间无明显阻隔物,无线信号遇到不同阻隔物均会信号衰减,其中钢结构阻隔对其影响最大,几乎使信号反射,因此现场安装时接收器或其天线必须尽可能架高
无线发射器通常为IP65,接收器可以达到IP66或IP67
单发射器对单接收器对单锚绞机控制:发射器与接收器一对一连接,系统简单明了,任何一台锚绞机可单独运行互不干涉。
单发射器对单接收器对多锚绞机切换控制:首个电气柜通过接收器收到发射器上唯一的一套控制信号,通过发射器上选择开关辨别出该套控制信号究竟作用在哪台绞车上。
该方案成本较低,但同一时间仅有一台绞车可遥控操作,此外为使通讯维持,与接收器相连的电气柜必须通电。受限于profinet通讯硬件距离。多台电气柜距离不能远,必须同时在船头或船尾。
单发射器对多接收器控制:此方案接收器与绞车单对单连接,发射器通过其面部上的选择开关选择与哪个接收器对码对应。此方案可应用于同一个发射器器既可操作船艏亦可操作船尾的情况,或一个发射器切换操作多台绞车的情况。
八、制动电阻
经济型变频器采用二极管整流模式,即三相交流基频电源通过二极管整流成直流电,然后通过可控逆变器将直流电再逆变为可调频率的交流电。
当电动机处于制动状态时(停车制动,带载主动放缆(锚)或被动放缆),电动机处于发电状态,电动机产生交流电通过逆变器反馈到直流母牌,但直流母牌无法再通过不可控二极管反馈到电网,此时直流母牌囤积能量,电压升高,必须通过制动电阻消耗能量,制动电阻即起到将电能转为为热能消耗能量的作用。
相对的,高端变频器采用可控IGBT整流,电机能量反馈可至电网,因此可节省制动电阻,但该变频器本身成本很高,一般用于高附加值设备。
九、谐波
由于变频器逆变电路的开关特性,对于其供电电源形成了一个典型的非线性负载,变频器输出侧电压、电流、非正弦或非完全正弦波含有丰富的谐波。由于变频器中要进行大功率二极管整流、大功率晶体管逆变,结果是在输入输出回路产生电流高次谐波,干扰供电系统、负载及其它邻近电气设备。因此船上有时会对设备有谐波控制要求。
海工类设备由于锚绞机变频器功率达到数千瓦,在船舶电网中占比较大,因此本身需要控制谐波,通常采用十二脉冲整流或IGBT整流(该类变频器谐波非常低且可能量反馈电网)。但我们的船舶绞车功率仅数十千瓦,且通常不会多台同时运行,因此谐波对电网影响有限。通常船舶会对电网总负载提一个电压总谐波要求。我们标准变频器电流谐波为30%-50%,如果要限制单台变频器谐波需要增加滤波器,成本较高。仅变频器电流谐波参数无法决定该因素是否会使整个电网的谐波超标。因此通常做法是谐波控制一般由配电板厂家考虑,根据发电机容量,内阻等参数结合船上所有设备计算谐波是否在要求范围内,如果不满足要求会在配电板侧统一处理降低谐波。
十、结束语
2023年上半年我国造船业几项主要指标继续维持全球第一,中高端船型占比持续提升,LNG等能源运输船和汽车运输船等特种船型的需求较好,也说明我国造船业由大开始变强。作为船舶配套产业则更需要顺应国际航运需求,积极推出低碳、节能、高效、绿色环保型船舶配套产品。锚绞机作为船舶配套产业的重要成员,也面临着重要转型阶段,绿色、安全、可靠、无污染的电驱动方式会越来越受到船东的青睐,电动锚绞机的市场占比一定会越来越高。以上篇幅通过具体交付项目为基础,详细介绍了电动锚绞机的电气控制系统与设计时需要注意的问题,旨在为船舶配套产业的进步作出应有的努力。
作者简介:于冬冬(1987.11-),男,硕士研究生,中级工程师,研究方向为滚装通道系统和甲板机械

 京公网安备 11011302003690号
京公网安备 11011302003690号


