



- 收藏
- 加入书签

无人机技术在市级基础测绘中的应用研究
 打开文本图片集
打开文本图片集
摘要:本文以市级基础测绘工作作为研究工作目标,提出无人机技术在市级基础测绘中的应用优势,并且对无人机测绘系统设计要点和控制测量工作内容进行探索,结合实际工作情况,对城市实景三维模型的1:500地形图数据生产工作进行探索,实践证明,无人机技术在市级基础测绘中的应用效果非常明显,提高了测绘工作的精度和效率,具有非常好的使用发展前景,希望可以为相关人员提供参考。
关键词:城市规划;基础测绘;无人机;应用
在新时代的发展背景下,我国基础测绘工作也获得了长足发展,基础测绘工作是一项复杂而又繁琐的工作,需要进行长期、大量的数据采集,并且还需要对数据进行分析,从而为相关部门提供决策支持。无人机技术具有操作简单、机动性强、获取信息速度快等优点,在实际应用过程中能够对多种类型的地形进行测绘。因此在实际工作中需要将无人机技术作为基础,通过应用无人机技术来开展市级基础测绘工作。在市级基础测绘工作中应用无人机技术,可以提高工作效率,并对数据信息进行收集和分析,为相关部门提供决策支持,从而推动基础测绘工作的发展。
1无人机技术的优势
第一,机动性强。无人机技术能够根据实际情况,对测量数据进行采集,在进行数据采集过程中,能够实现自动化、智能化控制。无人机在飞行过程中,能够实现对飞行路线的优化,并通过对地形的测量和分析,实现对测绘范围的合理确定。无人机技术还能够实现自动飞行、自动返航和自动降落等功能,可以通过图像识别技术和人工控制,实现数据采集的自动化。
第二,操作简单。无人机技术具有较强的灵活性,可以对各种地形进行测绘,并且在测绘过程中不需要设置专门的测绘人员,只需要选择合适的地形进行测绘就可以,同时无人机技术的操作较为简单,还能够通过对飞行数据进行记录和分析来确保数据采集的准确性和可靠性[1]。
第三,获取信息速度快。无人机技术在基础测绘中具有较强的机动性和灵活性,可以随时到达测绘区域进行测绘。并且在无人机技术中还应用了高科技设备和技术来进行数据采集工作,从而提高了数据采集工作的效率,同时无人机技术还可以实现快速充电和快速更换电池等功能,能够有效提高数据采集速度。
第四,质量高、精度高。无人机技术在基础测绘中具有较强的灵活性和机动性,并且具有较高的精度和质量。无人机技术能够对拍摄到的数据进行分析和处理,通过对原始数据进行处理后能够获得更加准确的成果信息。无人机在实际测量过程中能够获得比地面测量更高的精度、更高的速度和更远的距离等优势。
2无人机技术在市级基础测绘中的应用策略分析
2.1无人机系统设计
无人机系统设计是对无人机在测绘中的具体应用进行设计,需要对无人机的性能、数据获取系统以及通信系统等进行设计。同时还需要对无人机的控制系统和飞行平台进行设计,保证其能够满足实际的使用需求。其中无人机的控制系统包括飞行平台、无线电通讯以及飞行管理等,可以通过对飞行控制系统的具体操作对飞行速度进行调整,同时还可以对飞行高度和高度进行调整。可以采用无线电通讯技术将其与指挥中心进行连接,从而实现对无人机的指挥控制。无人机的飞行平台主要包括起飞平台、返航平台以及起降平台等[2]。在无人机系统的设计中需要对通信系统进行设计,实现与指挥中心之间的信息传输。在实际应用过程中可以选择北斗卫星导航系统作为通信方式,同时还可以选择基于 GPS卫星导航系统来实现对无人机的数据传输。需要对机载通信设备进行设计,通过对机载通信设备和指挥中心之间的通信接口进行设计,能够实现对指挥中心和无人机之间的信息传输,可以选择一种具有较强抗干扰能力的数字编码方式。
2.2控制测量
无人机控制测量工作在实际开展过程中,需要遵循一定的原则和要求,在进行无人机控制测量过程中,需要明确具体的实施方案,同时结合控制点的分布情况和实际地形情况,确定无人机控制测量的具体实施范围和实施方案。在实际布设过程中,需要保证控制点数量充足,同时保证点位布设的合理性和科学性,在选择像控点时,需要结合实际情况进行选择,同时需要对像控点精度进行明确。在无人机控制测量工作实施过程中,需要注意以下几点:第一,按照相关规定来开展实施工作,在实际开展工作过程中,需要按照相关标准来进行实施;第二,根据实际情况来制定具体的实施方案。例如:当所选区域存在高差较大时,可以选择地形较为平缓的区域作为无人机飞行的安全区域;第三,选择合理的测量方法。例如:当控制点分布较为稀疏时,可以采用三维激光扫描技术进行控制测量;当控制点分布较为密集时,可以采用传统摄影测量方法进行实施。
2.3航空摄影测量技术
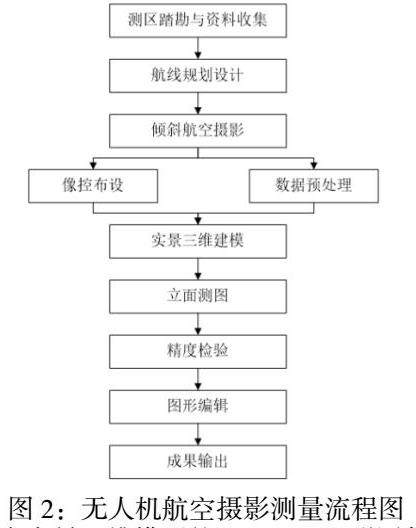
在市级基础测绘中,无人机航空摄影技术应用已经成为了一种常见的技术手段,主要工作流程如图2,在实际应用过程中具有以下几个方面功能:1)高精度测量:无人机航空摄影可以实现高精度的地面测量,通过搭载高精度GPS、惯性导航等传感器,可以获得较为准确的三维坐标数据,从而实现地形、道路、建筑物等的高精度测量;2)大范围覆盖:无人机可以在较短时间内覆盖大面积区域,从而实现区域内的测绘工作快速完成。此外,无人机可以搭载多个相机,实现多角度、多视角的测绘数据采集;3)数据精度高:无人机航测技术采用数字高程模型进行数据处理,可以实现高精度的地形测量和地物建模,从而保证数据的准确性和精度;4)数据获取效率高:无人机航测技术可以实现快速的数据获取,相比传统测绘手段可以节省大量的时间和人力成本,提高测绘效率;5)数据更新及时:无人机航测技术可以实现快速的数据更新,可以及时获取到地形变化等信息,保证测绘数据的实时性和准确性;6)数据应用广泛:无人机航测技术可以应用于城市规划、土地利用、交通规划、水利工程等多个领域,为城市建设和管理提供数据支持。因此,无人机航空摄影技术在市级基础测绘中具有重要的应用价值,可以提高测绘效率和数据精度,为城市建设和管理提供重要的数据支持。
3基于城市实景三维模型的 1:500 地形图数据生产
依据1∶500地形图,进行城市实景三维模型建立,将城市地形图和实景三维模型进行融合,实现城市地形图和实景三维模型的无缝对接,从而为智慧城市建设提供基础地理信息数据。基于无人机的实景三维模型重建技术是以三维建模软件为平台,利用无人机搭载立体像对进行摄影测量和遥感信息的获取,将获取的影像、点云等数据输入计算机进行处理,得到高精度、高精度的城市实景三维模型。该方法具有较强的自动化、智能化、高精度、高效率等的特点。
3.1数字高程模型(DEM)建库
利用实景三维模型采集地面高程数据,建立 DEM数据库,将城市地形图和实景三维模型进行融合,实现城市地形图和实景三维模型的无缝对接。DEM数据库中的高程数据是通过立体模型上点的位置和高程值来确定的,并且根据实际情况进行不同精度的点云数据采集。在实际生产中,考虑到地物的特殊性,DEM数据库需要满足以下要求:1)数据采集应该完整。点云中的点应该是实地测量时没有遗漏或重复的地方,而且点云要尽量均匀地分布在模型中;2)点云要有一定的精度。点云数据采集时需要选择一个合适的高程值作为标准,这样可以保证采集到的 DEM数据精度与标准一致;3)点云要有一定数量。城市地形图中一般包括道路、建筑物、水体、绿地等地物,在建立 DEM数据库时要保证每个地物有一定数量的点云数据作为数据源。建立 DEM数据库时,首先利用 GIS软件进行 DEM数据库采集,对采集到的点云数据进行点密度检测,选择符合要求的点进行点云提取;然后将点云数据进行分类整理,并对已有模型进行平差、修补等预处理;最后对处理后的点云数据进行拼接、剔除等操作。
3.2空三加密
基于实景三维模型的大比例尺地形图数据生产中,像控点布置是空三加密的重点,像控点布设直接影响到空三加密精度,根据项目实际情况,航摄控制点布设采用 GPS测量点和像控点相结合的方式。由于实景三维模型数据量较大,为了节省时间和提高效率,将像控点的布设分为两部分进行,一部分布置在实景三维模型区域中心,另一部分布置在实景三维模型外围,像控点布设完成后进行空三加密实验。空三加密主要包括正射影像制作、空中三角测量、特征点匹配等步骤,正射影像制作过程中主要以像控点法进行空三加密,利用空中三角测量方法进行空三加密,采用像控点法进行空三加密的原理是利用控制点获取像片的空间位置和姿态信息,然后采用 POS辅助空中三角测量方法计算同名像点的坐标,将其连接成完整的立体模型[4]。根据项目实际情况,设计了两种加密方案:一是利用像控点法进行空三加密;二是利用 POS辅助空中三角测量进行空三加密,对内业采集的像控点进行整理,将不符合要求的点位进行剔除,并在已有的控制点上进行新点位的补测,补测完成后,将补测点坐标输入到测区的空三加密软件中,形成整个测区的空三加密成果。根据空三加密要求,选择合适的量测精度及匹配算法,利用三维建模软件提取建筑物轮廓、天空背景等信息,形成实景三维模型,并对模型进行贴图、旋转等操作,得到最终的实景三维模型。将提取出的像控点坐标输入到空三加密软件中,进行空三加密,通过以上方法进行空三加密均能满足规范要求,但在实际应用中考虑到效率和精度的综合因素,采用像控点法进行空三加密。经过多次实验表明,采用像控点法进行空三加密的精度达到了规范要求,其中控制点精度在厘米级,像片上同名点精度达到了厘米级,满足1∶500地形图的生产需求,但该方法对像点数量有一定要求,否则会影响空三加密的精度。
3.3数字正射影像制作
实景三维模型数据可以作为数字正射影像的原始数据源,可以直接用于数字正射影像的制作,也可以进行后期处理,对实景三维模型数据进行数字正射影像制作,既可以减少外业工作量又能提高生产效率。在数字正射影像制作中选择合适的像控点对实景三维模型进行控制,并对像控点进行加密处理,当有控制点时可以利用这些控制点来生成像控点。由于像控点数量较少,可以采用直接空中三角测量法来生成像控点文件,并利用 RPC对其进行加密处理。将地面控制点通过连接件连接在实景三维模型上,将经过处理后的像控点文件导入到生产软件中,通过空三加密来生成数字正射影像。在空中三角测量生成的像控点文件中,需要将像控点坐标、重叠度等参数添加到相应的模型上,并用线框的形式表示出来,形成数字正射影像。制作过程中需要注意以下几点:1)控制点和点云数据最好使用同一平台上的软件来生成,减少匹配量;2)对于需要拼接的区域需要对模型进行拼接处理;3)数字正射影像应尽量避免遮挡现象;4)在使用空三加密软件时,应将生成的像对作为原始数据源来使用,若需要采用空中三角测量方法生成数字正射影像时,需将生成的像对作为原始数据源来使用,避免产生空三加密失败的现象。
3.4数字线划图生产
利用数字正射影像和实景三维模型生产数字线划图时,影像中每个像元都包含了地物点和道路信息,而传统的地形图生产只采集了像元内的地物点。因此,需要进行地面控制点的布设和测量。利用全站仪在外业进行控制测量时,主要采用定向测量方法。根据1∶500数字线划图的精度要求,需布设一定数量的控制点。由于控制点大多在道路两侧,因此可以在道路两侧布设一定数量的控制点。在外业观测时,由于影像上地物点有遮挡现象,因此需要采用激光测量技术对影像上的地物点进行定位[5]。根据控制点量取控制点坐标并建立控制网,然后将控制网与参考平面进行闭合连接。控制网的布设要保证控制点分布均匀、密度适中,并与已有道路网充分融合。由于激光测量技术具有效率高、精度高、成本低等优点,因此可将其应用到地形测量中,提高地形测量的效率和精度,在使用激光测量技术时,首先需要根据控制网布设方案确定出激光测距系统的位置和方位角信息,然后采集待测区域内所有点云数据并对其进行预处理,处理后的点云数据作为激光测距系统的控制信息,保证激光测距系统能正常工作。
3.5图幅拼接
数字地形图是根据1:500地形图的图幅和比例尺绘制而成,因此在实际生产中,一般采用1∶500的比例尺绘制地图,在测绘过程中为了使所绘制的地形图具有较好的连续性,一般采用图幅拼接的方式来进行。在测绘过程中可以将相邻图幅连接起来,或者将两个不同比例尺的地图拼接起来,即从两幅图的中间开始计算,顺时针旋转一定角度后再从另一幅图的边缘开始计算,直到两幅图拼接完成。根据本文所述方法生产1∶500地形图数据,以1:500比例尺地形图为例。
4结语
综上所述,无人机技术具有作业成本低、效率高、灵活度高等优点,可快速实现对大比例尺地形图数据的采集,与传统测量技术相比具有较大的优势。本文以城市为例,在对其基础测绘数据生产过程中利用无人机技术进行了分析,并对其生产流程和工作方法进行了详细的阐述。通过对两种方法生产的数据进行精度对比,得出了无人机技术在市级基础测绘中具有良好的应用前景。
参考文献
[1]冯冲,韩健,温旭昶.二三维一体化新型基础测绘实施探索[J].城市勘测,2022(04):127-131.
[2]刘娣,何仁德.无人机倾斜摄影测量在1:500地形图中的应用[J].科技创新与应用,2022,12(24):181-184.
[3]王友,赵彦栋.无人机航摄在基础测绘1∶10000 DOM与DEM局部更新中的应用[J].江苏科技信息,2022,39(22):54-56+61.
[4]崔飞飞.无人机遥感技术在房产测绘中的应用[J].黑龙江科学,2022,13(14):123-125.
[5]蒋汪洋,李洋,郭长春.中航时固定翼无人机在应急测绘中的应用探讨[J].测绘与空间地理信息,2022,45(S1):224-227.

 京公网安备 11011302003690号
京公网安备 11011302003690号


