



- 收藏
- 加入书签

小径管道测绘机器人微惯性组合定位技术分析
 打开文本图片集
打开文本图片集
摘要:在科学技术的支持下,我国地下管道建设数量越来越多,结构也更加复杂,对地下管道运行状态检测水平要求越来越高。利用小径管道测绘机器人可以实现地下管道的高效检测,获取管道空间数据及其实际位置。基于此,本文主要分析小径管道测绘机器人微惯性组合定位技术,以期为从业人员提供参考,不断增强定位技术的应用能力,提高地下小径管道测绘的精准性。
关键词:小径管道;定位技术;RTK技术;陀螺仪
引言
管道是人们生产生活所需的重要设备,常用于各类能源运输以及城市用水输送,其位置多处于地下、建筑物内部,因此在使用时应重视其状态的检测,并及时开展维修工作。当前我国地下管道布置十分密集,但常用的测绘与定位技术容易受到管道管径的影响,出现检测精度低的问题。针对这一情况,相关人员应重视组合定位技术的应用,确保定位精准。
1陀螺仪定位技术
1.1陀螺仪的使用领域与性能
陀螺仪本身在测量管道时没有特殊的要求,可用于开挖、非开挖方式敷设的轨迹测量,如电力、排水等管道,同时对管道材料也没有限制,高密度聚乙烯、金属材料均可。因此在管道敷设的竣工测量、定点管道位置确定、管网新建与改造、地下管道信息化管理中的应用较为广泛。下图1为常见的陀螺仪传感器。为切实有效填补国内地下管线探测在新型仪器研发和管理系统构建方面的短缺,本项目的主要研发方向确定为新型国产陀螺仪及其管理系统,项目研究主要内容涵盖陀螺仪、RTK等相关技术,总体投入资金为300万元,参与人数8人,项目周期大约为7个月。
同时,在测绘系统中,重视陀螺仪的模块化设计与诊断模块的设计,能为设备的后期维护与管理提供便利,可以确保测绘工程精确、可持续。利用陀螺仪实现小径管道测绘,可以借助专用设备在管道信息系统中导入管道测量信息,该系统还支持EXCLE、TXT、CAD等各种数据格式输出,在实际应用时具有操作简单、维护便利的特点,应用前景广阔。
就项目具体研发情况而言,其所研发的陀螺仪器结构较为复杂,其主要包括用于测量管道方向角度的惯性陀螺仪导航系统、用于采集和储存数据的储存系统和集成电路板。就外部情况而言,其使用了轮组支架作为主要支撑仪器设备,并部署了用于测量管道实际长度的外置里程记录装置。设备使用独立计算机系统及其相应配套软件进行解算操作。
1.2 RTK陀螺仪定位
RTK是一种实时动态测量技术,该技术以载波相位为依据,能实现数据的动态测量,并提供检测站点在指定坐标中的三维定位信息[1]。将其与陀螺仪结合,可以解决单一陀螺仪测量的局限性,实现管道三维数据的具体化。
从RTK技术和陀螺仪本身特点出发,该定位技术的使用范围较广,且在布置测量控制点后,也能增强陀螺仪的实用性。在智能型地下管道惯导测绘系统管理与应用研发项目中,项目人员利用RTK技术能在高层建筑较少上方遮蔽物较少等条件良好的地方完成测量的特点完成管道测量,同时在条件较好的地点布置测量控制点供陀螺仪使用,进一步减少误差,提高了测量效率与精度。项目研发充分利用了陀螺仪与RTK相互配合的基本原理,利用RTK在高层建筑上方遮蔽物较少等条件良好的地方进行测量的特点,将高层建筑密集区域部分点位作为主要的测量控制点,以供陀螺仪进行使用。通过此方法不但能够有效解决陀螺仪难以借助管道两端实现控制的问题,而且可大幅度提升RTK的测量控制点精度,消除误差积累。
1.3 MEMS陀螺仪定位
MEMS主要指惯性导航单元,其主要性能由内部的陀螺仪决定。MEMS陀螺仪误差包括标度因素、安装误差等内容,可以通过建立目标函数并利用优化算法求解。具体而言,在定位过程中,陀螺仪的标度因数、安装误差以及偏值可以利用正反角度率法确定,其中正转与反转的角速率点选择应在11个点以上。数据采集时,小于100°/s的角速率点采集数据应在30个以上,大于100°/s的角速率点采集数据应在5个以上。MEMS陀螺仪定位计算时可以去除地球自转分量,通过初始的静态陀螺数据平均近似获得。在传感器旋转过程中,陀螺仪的原始数据也无法像加速度计一样取值,因此应提前进行原始数据的预处理,降低噪声。常见的噪声处理方法以小波分析法为主,该方法可以有效处理微惯性传感器输出信号,将有用信号保留,去除较小噪声,降噪效果较好。
本项目所研发的陀螺仪适用于包括电力、排水、自来水、天然气、电信通讯及其他类型的管线铺设。管线并无严格材料要求,金属、PVC、PE和HDPE等材料均可适用。陀螺仪因其具有的诊断模块和模块化设计等基本原理,其设备管理和维护相对较为方便,测绘操作的可持续性和精确性因而能够得到有效保证。
2 MEMS加速度计定位技术
通常情况下,单一的MEMS陀螺仪检测性能较加速度计差,在陀螺仪感应惯性-载体系角速度的影响下,还会出现速度误差,因此应合理利用加速度计定位法,减少数据误差。
目前,加速度计的定位位置不一,有6位置定位、8位置定位以及24位置定位,其中6位置定位主要用于转台定位,定位路径不同加速度的输入激励不同,但基本能激励所有误差参数,确保定位结果位置[2]。在实际应用过程中,当加速度计敏感轴角度为45°时,定位系统的可观测性较强,采集技术应用流程如下:
首先应将传感器一面朝下水平放置,并完成初始化,初始化的长度由陀螺仪的Allan方差决定。其次,围绕底面一个轴转动,旋转角度控制在45°左右,静置半分钟后收集相应数据,随后将其恢复至初始状态。最后,再绕另一轴重复上述动作,直到六个面的数据全部采集完成。结合该技术,可实现管道测绘前的误差参数的提前测定,在没有转台基准的情况下,可以利用所获的激励误差构建目标函数,选择合适的优化算法求取误差参数。
3里程计误差定位技术
3.1误差定位
通常情况下,里程计误差方程内不包含里程计误差,因此里程计误差需单独定位,其定位方法如下:
首先,定位里程计刻度系数误差值。在小径管道测绘机器人定位系统运行过程中,可以利用一段已知长度的直管道长度定位里程计刻度系数误差。当选定好管道长度后,拉动小径管道测绘机器人测量里程数据并计算平均数据即可,刻度系数误差表示如下:
其中δKD为刻度系数误差;ΔS为平均拉动距离;ΔS’为管道长度。
其次,推算里程计航位时,可以根据轨迹相似原理,结合方位失准角、里程计方位安装误差角确定。
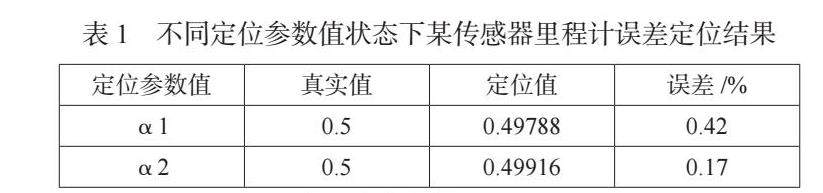
最后,依据上述内容,确定小径管道测绘机器人定位传感器误差定位流程。简单而言,即在传感器定位数据采集后,结合静态加表数据、动态陀螺数据,确定陀螺仪误差参数,随后通过动态试验,利用陀螺数据与里程计数据,推算里程计误差参数。下表1为不同定位参数状态下某传感器里程计误差定位结果。
3.2 MINS/里程计组合定位算法
MINS即MEMS惯性导航系统,将其与里程计系统组合,可以利用航位状态误差参数以及里程计误差参数,并借助误差估计反馈校正技术校正MEMS惯性导航解算累积误差,以此提高管道定位的精确度。因此在系统误差模型的设计上,应以MINS误差方程、航位推算误差方程为基础,获取MINS捷联解算位置误差方程即可。该组合系统的滤波算法则包括系统状态方程以及量测方程两部分。在实际进行组合定位系统导航时,应选择合适的滤波算法,如卡尔曼波算法。想要进一步提升管道定位的精确度,需采用管道定位误差抑制方法,以平滑算法为例,该算法能离线处理数据,可以提升数据处理的精度,一般情况下,在非线性系统的优化平滑估计中,常使用RTSS平滑器,能取得较好的应用效果[3]。在小径管道测绘机器人组合定位系统中,利用RTSS平滑算法能实现系统的平滑处理,提高定位精准性。设备通过里程计量对高度、精度、稳定性和惯性等的测量,具有明显的高数据更新率和短期稳定性,在计算机系统的加持下,能够满足包括CAD、TXT和EXCLE等多种数据格式的输出需求,不但操作较为迅速便捷、维护较为简便,且具有周期短、效益较高等显著特点。
4.小径管道测绘机器人定位技术前景分析
目前,在地下管道测绘中以惯导陀螺仪为主要的检测仪器,支撑管道定位与数据分析工作。因此从定位技术的实际应用情况出发,惯导陀螺仪设备仍有较大的发展空间,未来将呈现出更大的自主性、抗干扰性,以及更高的自动化程度,实现测量结果的可视化分析,提高数据的真实性与准确性。
第一,持续发展管道三维姿态测量技术。现有的管网检测技术主要包括地面测量与地下测量两个方面,但在实际测量过程中,存在误差大、人员操作水平要求高等情况,应用的测量技术无法获取地下管网的精确定位数据。因此,应合理利用管道三维位置测量仪技术,获取管道的精准信息,合理开发地下空间。但该技术对测量环境的稳定性要求较大。该技术的实现依据自身运动轨迹,通过精准测量其轨迹获取所测管道中心坐标序列,因而不会受到内置惯性传感器的影响,因此应重视探索保持测量管道的稳定的方法。
第二,开发管道探测惯性导航系统。管道实际分布位置相对复杂,容易受到地形、海水等因素影响信息收集的准确性。因此,相关人员应尝试开发管道探测惯性导航系统。在导航系统的设计上,应将加速度计与陀螺仪作为惯性导航系统的硬件,在解算算法中引入互补信号滤波与卡尔曼滤波,增强管道测量的精准性。该系统上位机应具备数据解算功能,下位机应能实现数据采集、保存与传输等操作,实现加速度计、陀螺仪数据的精准收集。从整体上而言,整个惯性导航系统需具备独立性强、探测精准度高的特点,为持续开展管道测绘工作提供支撑。此外,相关人员应重视国产陀螺仪与管理系统的研发。
第三,持续研制惯导测绘自动化机器人。不同管道的作业条件不同,对测量技术的要求也不同。想要增强测量精度,还应在自动化技术的支持下,不断探索测绘自动化机器人的开发与研制。在测绘过程中,机器人只需搭载管道数据检测模块,利用收线装置控制机器人位置即可测量管道的三维信息。在缺少GPS信息的情况下,也能精准测量地下管道数据,形成三维管道图。在管道数据测量模块中,应设计自动判断与处理功能,增强系统的灵活性,提高检测效率。
结论
总而言之,我国的地下管道结构日益复杂,需重视管道测绘技术的应用与开发,借助先进的定位技术,掌握地下管道的详细信息。本文主要分析了陀螺仪定位技术、MEMS加速度计定位技术以及里程计误差定位技术,其中以RTK技术为支撑的陀螺仪定位技术在实际应用时取得了良好的效果。在未来,相关人员仍需持续探索地下管道定位技术,进一步提高测绘定位的精准度。
参考文献
[1]张梦轩,苏治宝,索旭东.移动机器人定位方法研究综述[J].车辆与动力技术,2023,(04):56-62.
[2]涂远泯,刘飞飞,曾波华,等.基于多传感器融合技术的移动机器人位姿估计方法研究[J].制造业自动化,2023,45(11):137-141.
[3]杨杰,安文斗,管练武,等.小径管道测绘机器人过弯道特性研究[J].自动化与仪器仪表,2021,(06):165-169.
作者简介:吴志强,男,1989年12月15日,汉,籍贯:江苏盐城大丰,本科,中级,研究方向:测绘测量。

 京公网安备 11011302003690号
京公网安备 11011302003690号


