



- 收藏
- 加入书签

架空线路新型放线滑车作业过程监测与验证
 打开文本图片集
打开文本图片集

摘 要:在大转角放线情况下导线的偏角较大,易导致滑车偏移角度较大,与塔身距离较近同时导线与滑轮存在一定偏角,放线过程中易造成磨损,增大了投运后线路运行时的电晕损失,通过地面牵张机的调整无法完全消除此偏差。本文提出可调整新型放线滑车,放线滑车采用与塔身多点的连接,可实时监视放线滑车的运行状态与导线贴合的状态,可远程调整滑轮与导线的偏角,增加导线展放工作的安全可靠性,避免导线磨损。本文对新型滑车进行了验证,通过滑车的整体受力监测、滑车调整姿态与空间角度等参数进行了分析研究,验证了新型滑车设计角度偏差补偿与受力情况的合理性与准确性。本文提出的新型放线滑车为导线展放施工的安全性提供了技术保障,可为架空线路展放线工作提供一定的参考。
关键词:放线滑车;视频监控;受力分析;导线磨损;空间角度
中图分类号:TM752
Abstract: In the case of large corners, the angle of the wires is large, which can easily lead to a large shift angle of the car. There is a certain corner of the wire and the pulley from the tower body. The electromotive loss during the runtime of the post -transportation line cannot completely eliminate this deviation through the adjustment of the ground tensor. This article proposes to adjust the new type of carbal, and use the connection to the tower body with multiple points, which can monitor the running status of the running of the line in real time. The safety and reliability of the work to avoid wear from the wire. This article has verified the new type of boat, analyzed and studied parameters such as the overall stress monitoring of the boat, the adjusted posture and spatial angle of the boat, and verified the rationality and accuracy of the new car design angle deviation compensation and the reason for the stress situation. The new type of launch on this article provides technical guarantee for the safety of the construction of the wire show, which can provide a certain reference for the launch work of the overhead line exhibition.
Keywords: Putting on line; Video surveillance; Force analysis; Wire wear; Space angle
0 []引言
输电线路工程施工过程中,架空导线放线工作主要采用张力放线[1-3],具有占地面积小、经济性高、放线速度块、机械化施工率高等优点。放线滑车是架空导线展放线过程中的重要组成部分,连接于杆塔横担上,承接牵引绳与导线,进而实现导线展放作业。现状导地线展放施工过程中,需安排工作人员现场观察放线滑车与导线的状态,根据所观察状态与实际施工经验将调整信息实时传递给牵张机操作人员[4-6],针对各个工况进行相应的调整。现场观察不够精确,同时地面设备的调整[7-9]不能从根本上解决。
放线滑车的受力及运动偏角是施工过程中影响安全的重要因素,因此国内外学者针对此方向展开了多方向研究。秦剑等在基于悬链线法的张力放线连续过程计算方法及工程试验[17]中提出了导线张力放线计算方法,其建立了放线计算方程组,其中主要包括节点高差方程与滑车前后的张力平衡方程等,提出了放线作业过程中各种物理量的多次迭代计算方法,对其运动过程进行系统分析,可综合计算出放线牵引张力、滑车偏角与滑车荷载等参数。
本文提出一种新型放线滑车,可实现远距离实时监视放线滑车的运行状态[10-14],可远程控制调整放线滑车水平偏角,减小与导线受力方向的偏角,减小导线磨损率。对滑车的整体受力监测[18-20]、滑车调整姿态与空间角度等参数收集分析,验证了滑车各个工况下设计角度偏差补偿与受力情况的合理性与准确性。
1 新型放线滑车的设计
1.1整体设计
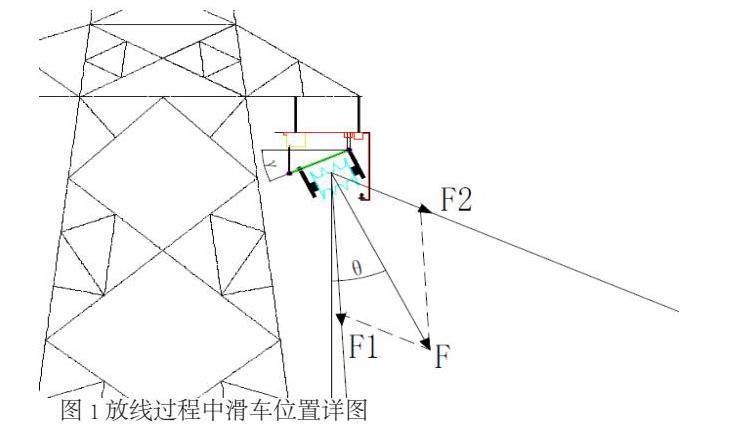
本文设计提出了一种新型可视频监测调整补偿偏角的放线滑车,本装置主要组成模块为滑轮模块、整体框架、运动模块、监控模块。根据图1可知,本装置主要包含:摄像头、滑轮、支撑连接钢材、可遥控运动装置、蓄电池、开关电源、置物板等组成。
设备整体框架:置物板固定于钢材上,将可遥控运动装置、蓄电池、开关电源固定于置物板,滑轮通过钢材放于置物板下,通过圆钢与钢材与可遥控运动装置连接,摄像头位于最下方角落。
滑轮模块:滑轮的侧边采用平滑曲线形式,在放线过程中当导线受力更加均匀,不易损坏滑轮本体,同时平滑的曲线保护了导线本体。
监控系统:将球形摄像头固定于设备的下方角落,监控范围辐射整个设备,通过蓄电池为摄像头供电,摄像头与显示屏路由一体机通过无线通信,可在显示屏实时显示监控画面。
运动模块:可远程控制运动装置上升与下降的长度调节滑轮运动的角度。调整到导线与滑轮垂直。
如图1所示,放线过程中放线滑车通过钢材固定在杆塔横担下方,此种固定方式下滑轮上方主体部分不易发生偏移,始终处于较稳定的工作状态,可保障滑车整体原理杆塔塔身避免碰撞与摩擦。图中导线所受拉力的合成力F与垂直方向的偏角为θ,对应滑车的补偿偏角应为θ。因此需对滑车荷载、偏移角与导线偏移程度进行监测。
1.2受力监测模块
本文中受力监测采用高精度、低功耗特点的无线拉力传感器,无线拉力传感器,它具有弹性主体,弹性主体内具有的空腔内壁上贴附有应变片,在运行时应变片将受到力的量转化为电的模拟量,经计算转换后将荷载的大小转化为模拟量的大小,经过数模转化后将数字量电信号通过通信模块传输给远程测控终端,根据返回的数据即可得到各状态下滑车所承受的荷载力。
为保障受力监测模块可长时间工作,放线滑车通过大容量蓄电池为其提供电能供给。放线工作过程中,其放置于放线滑车于杆塔横担连接钢材之间,实时监测此处的受力状态。
1.3调整补偿角度采集
本文中放线滑车的角度调整可综合视频监控画面与计算所得角进行调整,需将滑轮调整至与导线垂直,即导线牵引合力垂直于滑轮,同时可根据视频监控实时监视的画面手动进行调整,将滑轮调整至于导线方向垂直后停止。减少导线磨损程度,加快放线速度,提升放线效率与放线作业安全性。
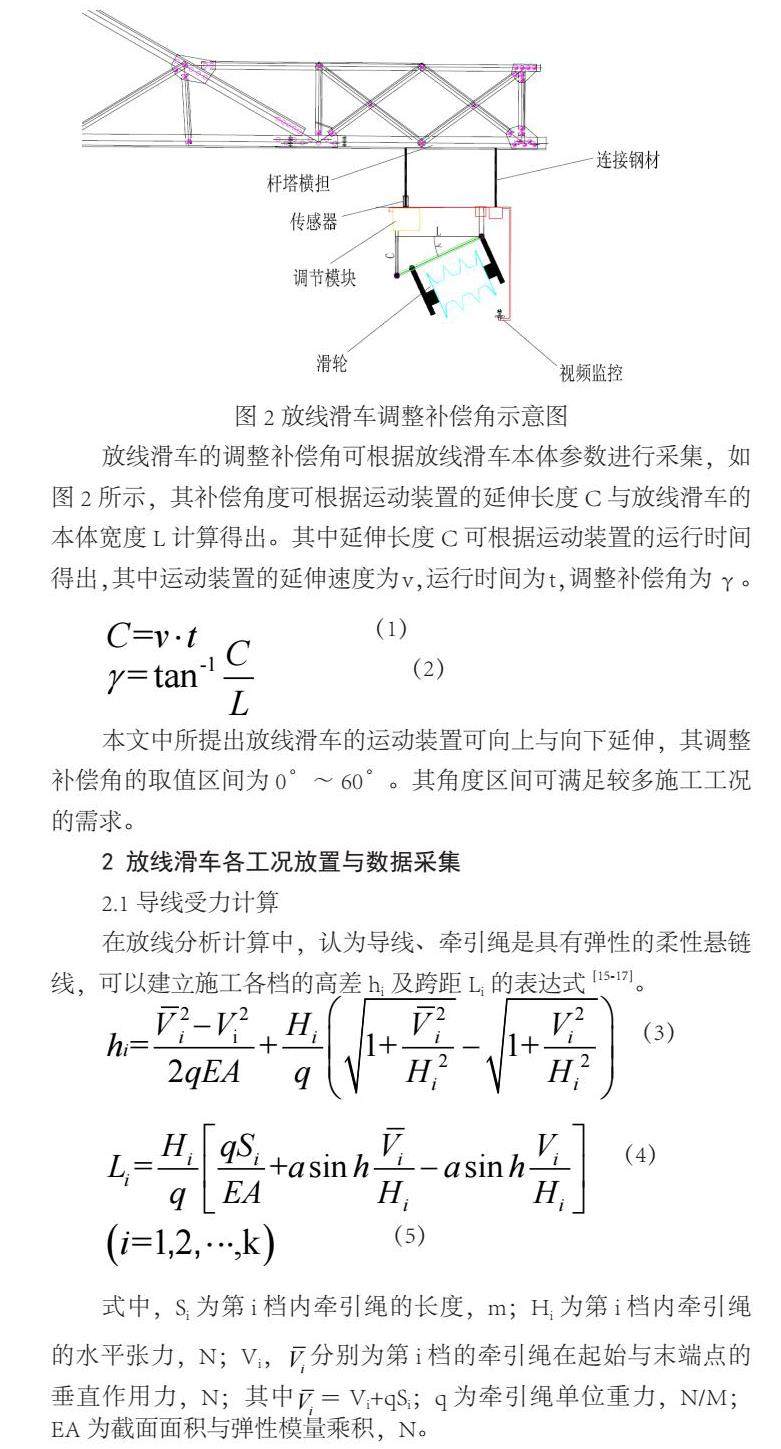
放线滑车的调整补偿角可根据放线滑车本体参数进行采集,如图2所示,其补偿角度可根据运动装置的延伸长度C与放线滑车的本体宽度L计算得出。其中延伸长度C可根据运动装置的运行时间得出,其中运动装置的延伸速度为v,运行时间为t,调整补偿角为γ。
本文中所提出放线滑车的运动装置可向上与向下延伸,其调整补偿角的取值区间为0°~60°。其角度区间可满足较多施工工况的需求。
2 放线滑车各工况放置与数据采集
2.1导线受力计算
在放线分析计算中,认为导线、牵引绳是具有弹性的柔性悬链线,可以建立施工各档的高差hi及跨距Li的表达式[15-17]。
式中,Si为第i档内牵引绳的长度,m;Hi为第i档内牵引绳的水平张力,N;Vi,分别为第i档的牵引绳在起始与末端点的垂直作用力,N;其中=Vi+qSi;q为牵引绳单位重力,N/M;EA为截面面积与弹性模量乘积,N。
根据连续张力放线计算方法[18],结合图3可进行如下定义,以放线滑车为原点O建立三维坐标系xyz,其中x轴表示张力水平方向,z轴表示垂直方向,其中张力F1所处平面为M1(oxz),牵引力F2所处平面为M2,其中M2为平面M1逆时针方向旋转(180-ω)°,则可得各方向上的力的表达式如下:
2.2导线力偏角计算
由2.1可得,F与z轴的夹角θ即为放线滑车相对垂直方向k的偏斜角,则可得出对应偏斜角的计算公式为:
本文中放线滑车本体不会产生偏移,偏移补偿的主体部分为滑轮,其中滑轮质量较小,因此其偏移的重力分量可忽略不计,不考虑放线滑车本体重力影响。因此可得其导线力偏角的值即为θ。
2.3滑车受力计算与采集
放线滑车运行前将无线拉力传感器数值置0,因此放线过程中计算所受作用时可忽略放线滑车本体重力,因此垂直方向所受拉力可等效于放线过程中的牵引绳与导线合作用力的垂直分量。
根据图5所示,垂直分量力的计算公式如下:
式中,FC为放线滑车连接钢材所受拉力,F为导线力的模。结合前公式,可推导出放线滑车补偿角与FC的关系式为:
3 数据分析与验证
3.1偏角调整后荷载对比验证
根据文中提供方法进行了计算与现场试验,采集了5组放线滑车的参数,采用两种方式进行了荷载的计算处理,并针对计算所得数据进行了分析对比。
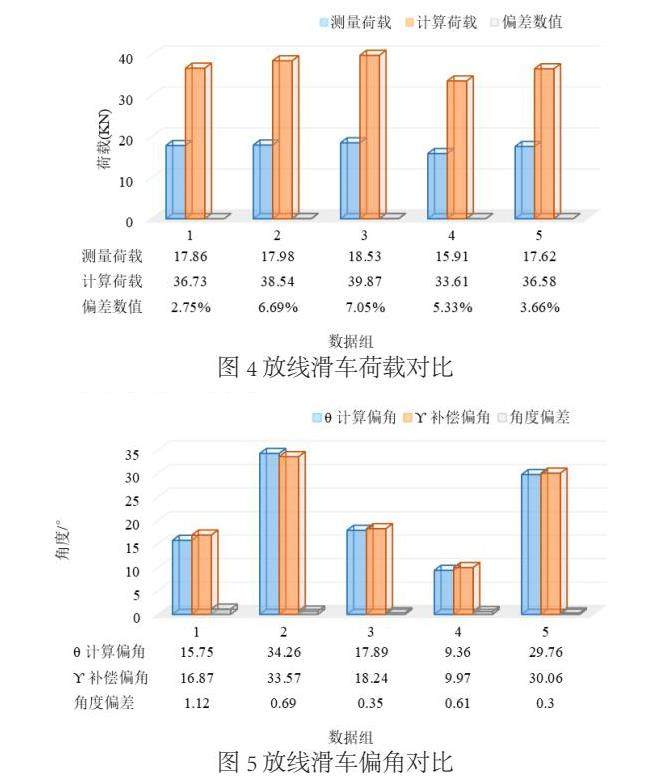
如图4所示,5组数据中,测量所得荷载FC的双倍与计算荷载Fsinθ的数值较为接近,相对偏差均小于8%,且其平均值约为5.1%,同时放线施工作业过程中,考虑导线风偏受力、温度变化等因素的影响,其误差值在合理范围内,二者综合考虑取均值的数据测量精度较高。数据较为合理,也侧面反映此种新型放线滑车的调整方式较为便捷合理且安全。
3.2.偏角补偿对比验证
根据文中方法进行了计算与现场试验,试验中采集了5组放线滑车的参数,采用两种方式进行了偏角的计算处理,对计算所得数据进行分析对比。
如图5所示,5组数据中,根据所收集的基本参数计算所得偏角θ与实际计算的补偿偏角γ的数值相似度较高,数据较接近且角度偏差均小于1.5°,角度偏差的均值约0.6°,侧面验证了两种偏角计算与调整方式较可靠,现场通过视频观察调整方式更加便捷与方便操作,因此本文提供的新型放线滑车调整角度方式较合理,可使滑轮更好地与导线处于垂直方向,导线磨损率更低,放线速度更快,施工安全性较高。
综上,本文提出的放线滑车较为合理,补偿角调整方式便捷且精确,可远程调整滑轮与导线的偏角,对其偏角进行补偿,使得导线与滑轮的角度最为合理,最大程度上避免了导线在展放线过程中的磨损,降低投运后导线的电晕损耗,提高导线展放线速度,增加导线展放工作的安全可靠性。
4 结论
本文提出了新型放线滑车的思路并并其进行验证后,得出以下结论:
a)放线滑车荷载可由连接钢材上的拉力传感器实时采集,也可根据连续张力放线计算方法计算得出,荷载的大小均与偏角有关且二者之间偏差较小,侧面反映了新型放线滑车调整偏角方式的可靠与可行性。放线滑车的补偿角γ可通过调整时间t计算与视频监控实时调整得出,滑车偏角θ也可根据连续张力放线计算方法得出,校验后二者接近,偏差值小于1.5°,验证了放线滑车补偿角调整方式的合理性。
b)通过运动装置调整滑轮补偿角,可较精确地使得滑轮与导线处于垂直状态,最大程度上减小了展放线施工过程的磨损,减小了投运后的电晕损耗,提高了放线速度与施工效率,增加了施工的安全性与经济性。
参 考 文 献
[1] 季鑫.超高压输电线路张力放线施工[J].机械管理开发,2008,(05):59-61.
[2] 林光龙.张力架线时滑车失压或上扬分析及预防措施[J].广东电力,2001,(04):31-32+83..
[3] 鞠彦忠,郭 圣.基于Adams平台的张力架线动力学仿真分析[J].水电能源科学,2014,32(9):186-202.
[4] ZI B,DUAN B Y,DU J L.Dynamic modeling and active control of a suspended parallel roboe[J].Energy and Buildings,2018,18(1):1-12.
[5] JehA RYU,HO-SOO KIM,HONG JAE YIM.a=An efficient and accurate dynamic stress computation by flexible multibody dynamic system simulation and reanalysis[J].KSME International Journal,2017,11(4):386-396.
[6] 高 亮,徐瑞芃,张晓飞,等.基于张力调整弧垂的输电线路架线施工研究[J].通信电源技术,2017,34(1):118-120.
[7] 祝丰年.张力或低张力放线在220kV线路施工中的应用[J].华中电力,1991,(S1):87-89.
[8] 王永恩,特高压输电路张力架线用小挠度组合式多轮放线滑车.河南省,温县永恩电力机具有限公司,2010-09-05.
[9] 孙 淼,张必余,汪以文.新型2ד一牵三”张力架线施工工艺[J].电力建设,2012,33(08):113-115.
[10] 李君章.输电线路张力架线实用技术与计算[M].北京:中国电力出版社,2017.
[11] 张继平,刘直芳.视频中运动目标的实时检测和跟踪[J].计算机测量与控制,2004,(11):1036-1039+1051.
[12] 范伟平,娄 超,宋春虎等.输电线路导线舞动在线监测系统设计[J].自动化应用,2013,(01):34-36.
[13] 黄洪,陈瑚.500kV紧凑型输电线路施工特点及技术措施探讨[J].江西电力职业技术学院学报,2013,26(04):15-17.
[14] 黎向前.高压架空输电线路的张力放线施工技术[J].集成电路应用,2020,37(07):124-125.
[15] 秦 剑,万建成,贾宁等.导线接续管钢套对放线滑车的冲击计算方法及接触过程分析 [J].中国安全生产科学技术,2021,17(03):130-136.
[16] 江 明,郝玉靖,孙国磊等.输电线路放线滑车施工过程监测系统设计与实现[J]计算机测量与控制,2022,30(07):110-115+165.
[17] 秦 剑,刘 晨,齐志强,等.基于悬链线法的张力放线连续过程计算方法及工程试验[J].南方电网技术,2021,15(6):36-42.
[18] 秦 剑,夏拥军,基于分段悬链线理论的悬索分析矩阵迭代法[J].工程设计学报,2013,20(5):404-408.
资助项目:深圳供电局科技项目(090000KN23020006);
作者简介:白岩石(1989-),男(汉),广东省深圳市,大学本科,研究方向:电气工程,邮箱地址;1215669886@qq.com,通讯作者:白岩石(1989-),男(汉),大学本科,邮箱地址:1215669886@qq.com。

 京公网安备 11011302003690号
京公网安备 11011302003690号


