



- 收藏
- 加入书签

基于磁链观测的同步磁阻电机无位置传感器控制研究
 打开文本图片集
打开文本图片集
摘要:同步磁阻电机作为一种新型电机,具有制造简单、成本低、效率高等优势,近年来获得关注,在高效传动、电动汽车等领域具有广泛的应用前景。同时,无速度传感器在降低系统成本,减少传感器体积等方面已成为学术热点。
本文提出了一种基于磁链观测器的同步磁阻电机无位置传感器直接转矩控制策略,将改进的闭环磁链观测器应用于直接转矩控制和无位置传感器控制方法中。闭环磁链观测器采用查表法计算各电流下的电感参数,以减小同步磁阻电机磁路饱和及交叉耦合现象的影响,从而减小同步磁阻电机在铁芯饱和下对转子位置和速度的估算误差,以此来提高无位置传感器控制性能。
最后,在Matlab/Simulink中搭建基于磁链观测的同步磁阻电机转子位置估算仿真模型,验证所提方案的可行性。并将其应用于现有的无位置传感器控制策略中,分析改进磁链观测技术所带来的影响。仿真和实验结果表明,基于磁链观测器的同步磁阻电机无位置传感器控制策略可以很好的跟踪电机转速,并具有良好的动态响应性能
关键词:同步磁阻电机;无位置传感器控制;磁链观测;直接转矩控制;磁路饱和
一、介绍
永磁同步电机依靠转子永磁体提供励磁,具有运行效率高、转矩密度高等优势,但存在高温情况下永磁体容易退磁等问题。而同步磁阻电机转子依靠磁阻转矩运行,不需要永磁体或绕组提供励磁,不存在退磁的问题,同时具有结构简单、制造成本低等优点。因此,在高温等复杂的工作环境下,同步磁阻电机可以代替永磁同步电机。但如何通过电机结构的优化和高性能控制策略的设计,提高同步磁阻电机的运行效率,是目前同步磁阻电机的研究重点。
在电机的控制策略设计中,转子位置信息的精确度对控制性能具有重要影响。转子位置信息可以通过位置传感器测量或无位置传感器控制算法计算得到。其中,高精度的位置传感器在高温高湿等复杂的环境下无法稳定工作,而无位置传感器控制系统可以降低系统成本,增加系统可靠性。因此,同步磁阻电机的无位置感器控制具有重要的研究意义。
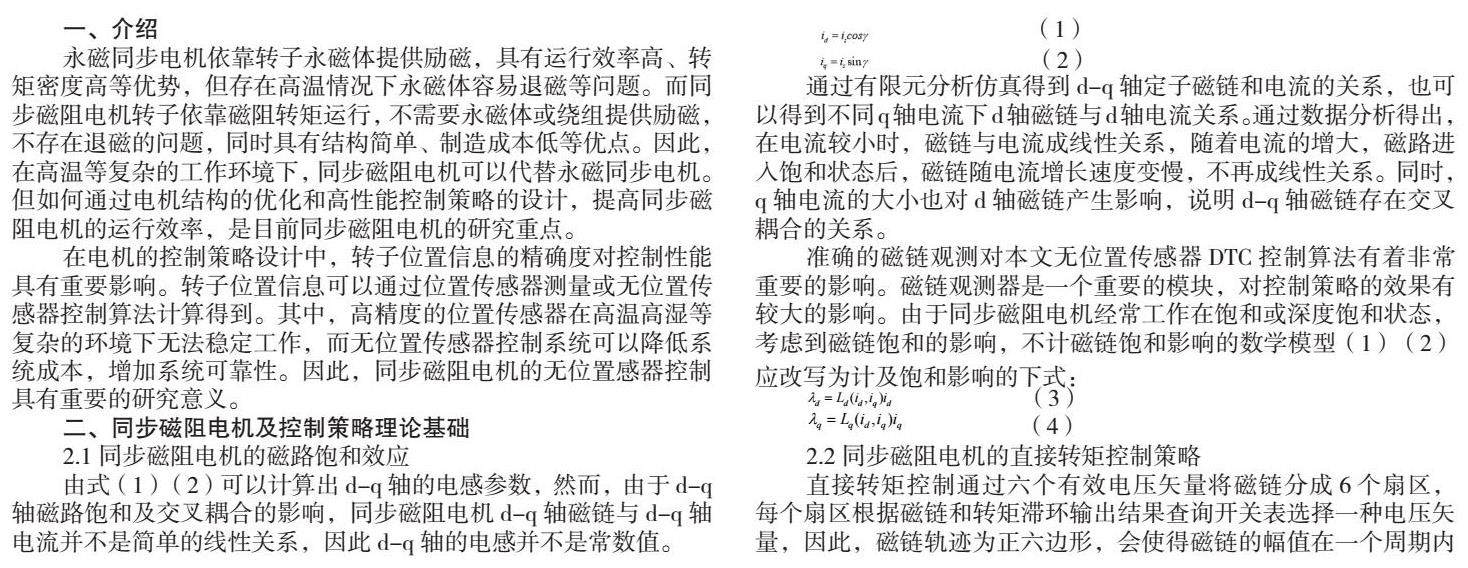
二、同步磁阻电机及控制策略理论基础
2.1同步磁阻电机的磁路饱和效应
4.2仿真结果分析
4.2.1稳态性能分析
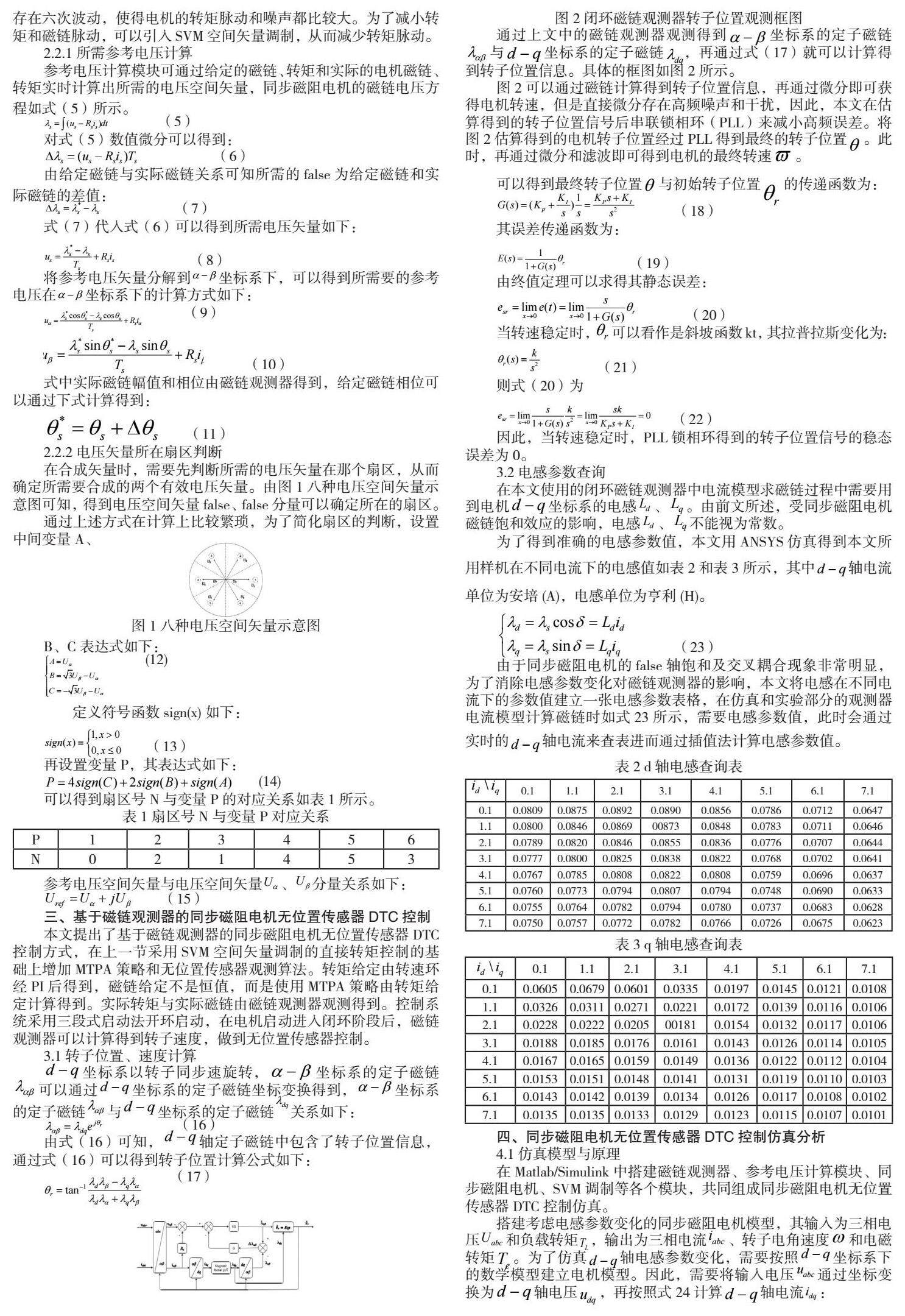
图3为不同转速满载情况下磁链圆轨迹。满载稳态情况下,转速200rpm时,磁链幅值范围为0.4076Wb至0.4091Wb;转速1000rpm时,磁链幅值范围为0.4067Wb至0.4111Wb;转速1500rpm时,磁链幅值范围为0.4057Wb至0.4118Wb。磁链幅值变化情况表明,满载情况与半载情况一致,转速越高,磁链脉动越大。
满载时,仿真分析转速分别为200rpm、1000rpm、1500rpm,负载转矩为9.5Nm情况下电机转速与转矩波形。
转速为200rpm、满载稳态情况下实际转速与观测转速误差范围为-0.0151rpm 至0.0198rpm,平均误差为0.0012rpm。
转速为1000rpm、满载稳态情况下实际转速与观测转速误差范围为-0.0088rpm至0.0084rpm,平均误差为0.000079rpm。
转速为1500rpm、满载稳态情况下实际转速与观测转速误差范围0.0135rpm至0.0127rpm,平均误差为0.000136rpm。
根据仿真数据可知,在给定转矩相同情况下,转速越大,磁链观测器观测转速稳态误差越小;在转速相同情况下,给定转矩越大,磁链观测器观测转速稳态误差越小。稳态运行情况下,仿真转速误差范围为±0.6%。
在给定转矩相同情况下,空载时,转速越大,磁链脉动越小;负载时,转速越大,磁链脉动越大。在给定转速相同情况下,转矩越大,磁链脉动越小。
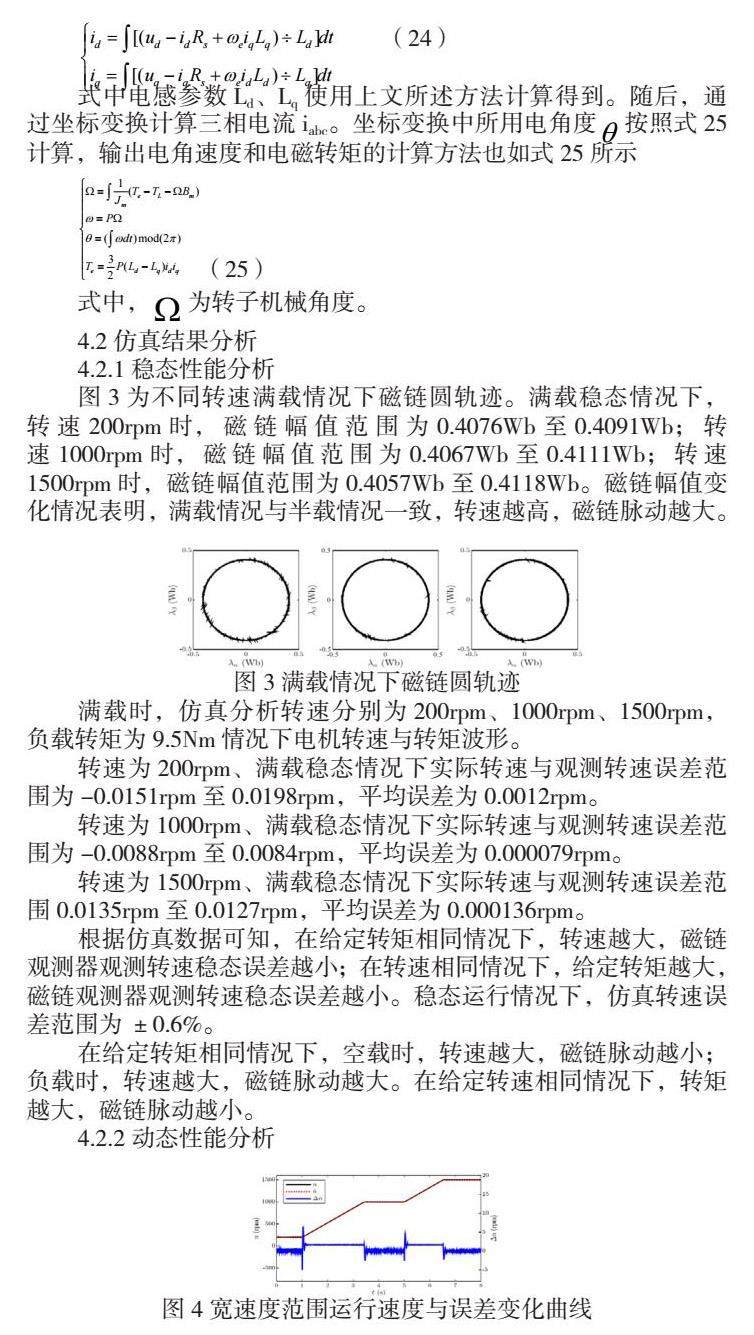
4.2.2动态性能分析
在动态转速响应性能分析中,负载转矩为0,速度给定为斜坡给定,在磁链观测器观测转速闭环阶段,给定转速以斜坡加速度330rpm每秒依次加速到1000rpm和1500rpm。图4为电机输出转速n和磁链观测器输出转速以及两者的误差的曲线。由于转速计算环节的PLL锁相环带来的转速滞后,电机在加速的动态过程中,约有2-3rpm的误差,但该误差在可接受范围内。在稳态时,转速稳态误差为0,与前文分析结果一致。
五、总结与展望
本文研究了基于磁链观测的同步磁阻电机无位置传感器直接转矩控制策略,将改进的闭环磁链观测器应用于同步磁阻电机的直接转矩控制和无位置传感器控制方法中。同时,将考虑电感参数变化影响的MTPA控制策略应用于DTC控制中。闭环磁链观测器采用查表法计算各电流下的电感参数,以减小同步磁阻电机磁路饱和及交叉耦合现象的影响。
通过仿真,验证了基于磁链观测器的同步磁阻电机无位置传感器DTC控制策略。仿真结果表明无位置传感器DTC控制策略在200rpm-1500rpm宽速度范围能很好的实现转速追踪,具有较好的静、动态响应性能。
本文所提出的基于磁链观测器的同步磁阻电机无位置传感器DTC控制策略属于基波模型法,在低速阶段误差较大。文中结合开环启动策略,在电机转速达到200rpm后切换为闭环控制。在后续研究中可以通过结合高频注入等凸极模型法,实现同步磁阻电机全速度范围无位置传感器DTC闭环控制。
参考文献:
[1]Okamoto Y ,Hoshino R ,Wakao S ,et al. Improvement of Torque Characteristics For a Synchronous Reluctance Motor Using MMA-based Topology Optimization Method[J]. IEEE Transactions on Magnetics, 2017, PP(99):1-4.
[2] Ding H , Zhu H , Hua Y . Optimization Design of Bearingless Synchronous Reluctance Motor[J]. IEEE Transactions on Applied Superconductivity, 2018.
[3]牛高产;张小波;李立;黄奇卉.同步磁阻电机无位置传感器控制研究[J].微特电机,2021,49(01):37-39.
[4]钱杰.同步磁阻电机无位置传感器直接转矩控制系统研究[D].浙江理工大学,2018.
[5]王双全;黄洪剑.同步磁阻电机无位置传感器控制系统研究[J].微特电机,2017,45(03):49-52.
[6]许云峰.同步磁阻电机直接转矩控制系统研究[D].中国矿业大学,2021.
[7]刘小青.基于高频注入法的同步磁阻电机无位置传感器矢量控制研究[J].信息记录材料,2020,21(09):226-227.
[8]林鹏.测定电感确定磁阻电动机转子位置方法分析[D].河北工业大学,2012.
[9]宗法鑫.同步磁阻电机的无传感器直接转矩控制方法研究[D].浙江理工大学,2023.

 京公网安备 11011302003690号
京公网安备 11011302003690号


