



- 收藏
- 加入书签

基于STM32H7的智能检测机器人设计与实现
 打开文本图片集
打开文本图片集

摘 要:针对传统的人工统计方式存在误差和低效的问题,容易导致统计结果的不准确性,同时也消耗教师们宝贵的时间和精力。针对这一现象,本文提出了一种基于STM32H7系列芯片的智能人数检测设计方案,通过引入先进的图像处理算法和深度学习模型的智能机器人,实现实时人数检测。同时,机器人能够自动巡视课堂,准确监测和记录人数,并将数据播放传送给教师,极大地简化了教师们的工作量,提高了课堂管理的准确性和效率。
关键字:智能机器人;图像处理算法;人数检测;深度学习模型;STM32H7
0引言
随着教育科技应用领域的不断拓展,智能教育系统处理数据呈现多样化、复杂化的趋势。在教育领域,智慧课堂巡视机器人正成为一种新兴的辅助工具,它集合了先进的技术,为传统的教学方式带来了创新和变革。基于此,本文提出了一种深度学习创新型“智数者”机器人。
“智数者”是一款基于STM32的智慧课堂巡视机器人,该项目的创新之处在于引入了智能化设计和先进的图像处理算法与深度学习模型。机器人自动巡视课堂并实现实时监测人数,可取代传统的人工统计方式,避免了误差和低效的问题。同时,完成实时传输、语音播报,为教师提供更及时、准确的信息支持[1]。
1方案设计
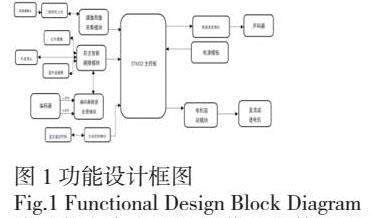
支持方案功能特性的“智数者”设计框图如图1所示。设计流程包括控制系统设计、图像采集功能实现、机器人驱动避障功能实现设计、数据语音系统设计、硬件搭建与连接、软件与硬件的通信、图像处理算法以及深度学习模型设计,系统控制与软件设计实现等。
该功能方案主要的图像处理算法以及深度学习模型设计,通过根据项目需求,设计和优化图像处理算法,包括人脸识别、人体检测和跟踪等算法,以实现对课堂内人数的快速识别和计算。设计合适的深度学习模型,利用大量的图像数据进行训练和优化,以实现对课堂图像中人数的自动识别和计算。采用适合开发嵌入式软件,以实现机器人的巡视和数据传输功能。[2~4]
2关键技术
在功能框架的设计中机器人驱动避障功能实现设计是实现该整体运动稳定性的关键之处。而图像处理算法以及深度学习模型设计更是该机器人的核心算法。
2.1机器人驱动避障功能单元
该驱动避障功能单元具备自动巡视功能、红外避障系统、超声波避障系统和稳定的巡视过程,并通过整合各个功能模块的算法实现机器人在课堂内的自动巡视任务。
自动巡视功能设计,通过采用路径规划算法,基于地图的路径规划算法,以确定机器人巡视的最佳路径。根据路径规划结果,编写动作控制算法,控制机器人沿着规划路径移动,并做出转向或停止等决策。
红外避障系统设计,通过采用红外传感器数据处理算法,根据传感器检测到的距离信息,判断是否有障碍物,并确定障碍物的位置。并设计避障动作算法,当红外传感器检测到障碍物时,机器人执行停止、后退或绕行等动作。
超声波避障系统设计,通过编写超声波传感器数据处理算法,获取周围环境的距离信息,并确定障碍物的位置和大小。设计超声波避障动作算法,根据传感器数据判断障碍物情况,并执行避让或规避障碍物的动作。
稳定的巡视过程设计,通过设计避障系统与自动巡视功能的协调算法,综合红外和超声波传感器数据,制定决策策略,确保机器人在巡视过程中稳定地避开障碍物。开发智能决策算法,考虑机器人当前位置、周围环境、目标路径等因素,动态调整机器人的行动,保证机器人巡视任务的顺利完成。
2.2图像处理算法以及深度学习模型
图像处理算法和深度学习模型设计是实现图像处理和识别任务的关键技术。“智数者”核心算法功能基于此完成。实现图像处理算法和深度学习模型设计需要进行数据预处理、特征提取、模型设计、模型训练、模型评估与优化以及模型部署等一系列步骤。
该部分关键技术将用STM32H7系列开发板主板作为嵌入式平台进行功能的完成。STM32H742xI/G和STM32H743xI/G器件基于高性能ArmCortex-M732位RISC内核,工作频率高达480MHz。Cortex-M7内核具有浮点单元(FPU),支持Arm双精度(符合IEEE754标准)和单精度数据处理指令和数据类型。STM32H742xI/G和STM32H743xI/G器件支持全套DSP指令和存储器保护单元(MPU),以增强应用安全性。
工作原理总框架:
1. 数据收集和预处理:收集足够多的图像数据集,并对数据进行预处理,包括调整大小、裁剪、调整亮度和对比度等操作,以减少噪声和提高数据质量。
2. 特征提取与选择:根据任务的需求,选择适当的特征提取方法。在传统的图像处理算法中,特征可以通过滤波器、边缘检测器、颜色直方图等方法提取。在深度学习中,特征一般通过卷积神经网络(CNN)自动学习。
3. 模型设计:根据任务的要求,设计适合的深度学习模型。常用的模型包括卷积神经网络(CNN)、循环神经网络(RNN)、生成对抗网络(GAN)等。模型的设计要考虑输入图像的大小、任务的复杂度和计算资源等因素。
4. 训练模型:使用标注好的数据对设计好的模型进行训练。训练过程中,模型通过反向传播算法不断调整参数,使得模型能够更好地拟合数据并提高性能。
5. 模型评估与优化:使用验证集或交叉验证方法对训练好的模型进行评估,并根据评估结果对模型进行调优。常用的评估指标包括准确率、召回率、F1 值等。
6. 模型部署:将训练好的模型部署到实际应用中,可以是服务器端、嵌入式设备或移动端。在部署过程中,需要考虑模型的推理速度和资源消耗等因素。
在STM32H7上实现人数检测和计算功能时,考虑嵌入式设备的计算和存储资源限制。因此,在选择图像处理算法和深度学习模型时,将采用权衡算法准确性和计算资源消耗之间的平衡,并进行优化以适应嵌入式设备的性能。[5~6]
总结来说,通过不断改进和优化这些环节,可以得到更准确和高效的图像处理和识别技术。
3结论
“智数者”的创新不仅在于技术层面上的集成与突破,更在于其所带来的教育观念和教育模式的变革。通过深度挖掘机器人在教学管理中的潜力并妥善解决相关的伦理和社会问题,我们有望构建一个更加智能、高效和公平的教育环境。这将对培养未来人才、提升国家竞争力产生深远的影响。因此,我们应当积极探索智慧课堂巡视机器人的应用前景和发展方向,以期在教育领域实现更大的突破和创新。
参考文献:
[1]张贺,宋国平.智能车辆识别图像处理方法浅析[Z].吉林广播电视大学学报,2023(1):39-42.雷永泉,万 群,石永康,等. 新能源材料[M]. 天津:天津大学出版社,2000.
[2]杨波,吴宗蔚,朱剑林,等.基于OpenCV和SVM的公共场所行人检测系统[J].电子技术与软件工程,2021(23):124-127.冯亚凯. 钯催化一氧化碳和烯烃共聚反应及其共聚物性能的研究[D]. 天津:天津大学化工学院,2000.
[3]翟云.人工智能产业发展及创新应用[Z].机器人产业,2023(1):26-29.
[4]张玉馥,闫宗梅.基于OpenCV的人员计数系统的研究[J].数码设计,2018,7(24):71-71.
[5]张亚婉,黄杰烽,陈威宇.一种视觉识别智能搬运机器人的设计[Z].信息技术,2023,47(8):24-28.
[6]孙浩然,王彬沣.基于STM32H7的智能视觉捕捉系统设计[J].计算机应用文摘,2022,38(9):41-43.
基金项目:辽宁科技学院大学生创新创业项目 项目编号:202411430016

 京公网安备 11011302003690号
京公网安备 11011302003690号


