



- 收藏
- 加入书签

基于单片机的无线遥控小车设计
 打开文本图片集
打开文本图片集

摘要:文章旨在探索基于单片机的无线遥控小车设计。针对单片机选型与性能分析,进行了无线遥控系统设计与实现,同时提出了小车运动控制系统设计,并根据小车的设计需求,进行了传感器与检测系统设计。根据系统测试与性能评估,研究发现,从系统整体来看,需要通过优化控制算法,提高小车的运动稳定性和路径规划能力。
关键词:单片机;无线遥控;小车设计
0 引言
在现代化科技迅速发展的背景下,无线遥控技术以其灵活性、便捷性和远程操作性等显著优势,在各个领域得到了广泛的应用。其中,基于单片机的无线遥控小车设计,不仅需要融合单片机控制技术的高效与稳定,还需要借助无线遥控技术实现对小车的远程操控功能,具有极高的实用价值和研究意义[1]。无线遥控小车的设计涉及多个领域的知识,包括单片机技术、无线通信技术、电机控制技术以及传感器技术等。通过合理选型和配置这些技术组件,可以构建出功能强大、性能稳定的无线遥控小车系统[2]。其中,单片机作为整个系统的核心控制单元,负责接收遥控指令、解析并执行控制算法,从而实现对小车的精确控制。
1 单片机选型与性能分析
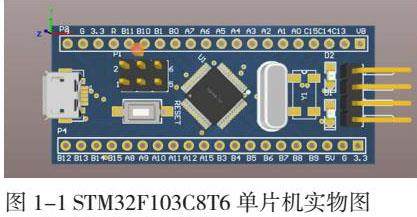
在设计基于单片机的无线遥控小车时,考虑到项目的实际需求,包括处理能力、功耗、外围接口、开发难度和成本等因素,本研究选择了国内常用且性能稳定的STM32F103C8T6单片机(如图1-1所示)作为核心控制器。
1.1单片机选型及依据
选用STM32F103C8T6单片机的主要依据包括:
(1)更强的核心处理能力。小车需要处理实时运动控制、传感器数据采集和无线通信等任务,要求单片机具有较强的处理能力[3]。STM32F103C8T6采用ARM Cortex-M3内核,工作频率高达72MHz,能够满足多任务处理需求。
(2)更多的外围接口。无线遥控小车需要连接多种外设,如无线通信模块、传感器、电机驱动等,要求单片机具有丰富的外设接口。STM32F103C8T6提供了丰富的I/O端口、USART、SPI、I2C、ADC等接口,能够满足系统需求。
(3)更低的用电功耗。为了延长电池续航时间,单片机的功耗需要尽可能低。STM32F103C8T6具有多种低功耗模式,可根据实际需求进行相关优化。
(4)更加丰富的开发环境与社区支持。STM32系列单片机在国内外有广泛的用户基础,相关开发资料和技术支持丰富,有助于加快开发进程并解决开发过程中遇到的问题。
1.2 单片机编程环境及开发工具介绍
为了高效地进行单片机程序开发,选择合适的编程环境和开发工具至关重要。对于STM32F103C8T6,本研究将使用以下开发工具:
(1)开发环境:Keil MDK、STM32CubeIDE。其中,Keil MDK负责集成开发环境,支持C/C++编程,提供丰富的调试功能。STM32CubeIDE则由ST官方提供,基于Eclipse,集成了STM32CubeMX,可用于图形化配置外设和生成初始化代码。
(2)固件库:STM32 HAL库。这是ST官方提供的硬件抽象层库,其简化了外设的配置和操作,全面提升了开发效率。
2 无线遥控系统设计与实现
在基于STM32F103C8T6单片机的小车设计中,无线遥控系统是实现远程控制的关键部分。该系统的设计包括无线通信协议的选择、无线遥控模块的选型及性能分析,以及无线遥控信号传输的可靠性研究。
2.1 无线遥控通信协议选择
无线通信协议的选择直接影响到系统的稳定性、传输距离和响应速度[4]。考虑到小车设计的实际需求,本设计选择了蓝牙协议作为无线通信的主要方式。蓝牙协议具有以下优点:
(1)低功耗:适用于电池供电的设备。
(2)传输距离适中:在空旷环境中可达10米以上,适合室内和近距离控制。
(3)通信稳定:蓝牙4.0及以上版本在数据传输稳定性和速率方面表现优异。
(4)广泛兼容性:支持多种终端设备,如智能手机、平板电脑等,便于实现控制端的多样性。
2.2 无线遥控模块选型及性能分析
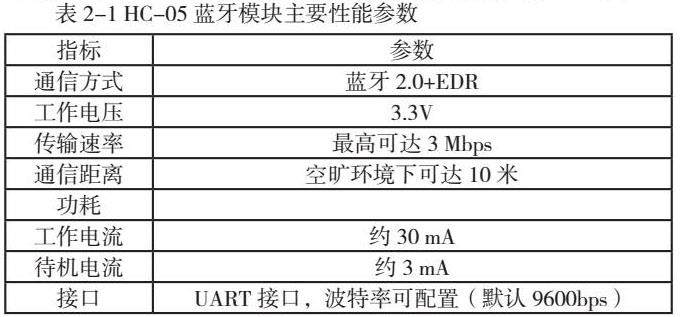
为了实现蓝牙通信,选择了国内常用的HC-05蓝牙模块(如图2-1所示)。该模块具有较高的性价比和稳定的性能,能够满足小车无线控制的需求。HC-05蓝牙模块的主要性能参数及特点如表2-1所示:
HC-05蓝牙模块通过UART接口与STM32F103C8T6单片机连接,配置简单,通信稳定,适合用于无线遥控小车的设计。
2.3 无线遥控信号传输可靠性研究
为了确保无线遥控信号传输的可靠性,进行了以下几方面的研究和优化:
(1)抗干扰设计:在硬件电路设计中,增加了去耦电容和滤波电路,降低电磁干扰对信号传输的影响。同时,合理布线,避免电源线与信号线平行或交叉,减少串扰。
(2)通信协议优化:在软件设计中,采用了错误检测和自动重传机制。通过CRC校验和超时重发,提高数据传输的可靠性和准确性。
3 小车运动控制系统设计
3.1 小车运动控制需求分析
在设计基于单片机的无线遥控小车时,运动控制系统的主要目标是实现小车的精确、稳定且灵活的运动,以满足遥控操作的各种需求。
首先,就小车的运动方式而言,一般来说,小车应具备前进、后退、左转、右转等基本运动能力。这些运动方式需要通过电机驱动电路来实现,因此,电机驱动电路的设计需满足控制小车运动方向的要求。其次,设计要满足对运动速度的控制需求。用户可能希望小车以不同的速度进行运动,因此,需要设计一种速度控制策略,通过调整电机的输入电压或电流来改变小车的运动速度。这种策略应确保速度的连续可调,并且具有较好的稳定性。此外,考虑到实际应用场景,小车可能需要在复杂环境中运行,因此,运动控制系统还应具备一定的避障能力。最后,为了提升用户体验,运动控制系统还应具备一定的响应速度和稳定性。响应速度决定了小车对遥控指令的反应快慢,而稳定性则关系到小车在运动过程中的平稳性和准确性[5]。
因此,小车运动控制需求分析主要包括运动方式、速度控制、避障能力以及响应速度和稳定性等方面的要求。在后续电机驱动电路设计中,速度与方向控制策略是本设计的重点,由于篇幅问题,本文会先论述速度与方向控制策略,从而确保无线遥控小车能够满足用户的实际需求。
3.2 电机驱动电路设计
在无线遥控小车的设计中,电机驱动电路是实现小车运动控制的核心组成部分。电机的转动方向和速度需要通过电机驱动电路来控制,因此,设计一个高效稳定的电机驱动电路对于实现小车的精确控制至关重要。
(1)电机驱动方案选择
针对小车运动控制的需求,本设计选用了直流电机作为小车的动力来源。针对不同的运动方式,本设计选择了双H桥驱动电路作为电机驱动方案。双H桥电路能够实现电机的正反转控制,并且具备PWM调速功能,从而满足小车前进、后退、左转、右转等运动方式的需求。
(2)电机驱动电路设计
本设计采用了L298N作为双H桥驱动芯片,其具有良好的性能和稳定性。L298N能够提供足够的电流输出,以驱动小车所需的直流电机,并且支持PWM调速功能。电路设计中,我们需要注意合理布局电路,确保电机驱动电路和单片机控制部分的电源隔离,以防止电磁干扰和电源波动对系统稳定性的影响。
3.3 速度与方向控制策略
在电机驱动电路设计好之后,需要制定相应的速度与方向控制策略,以实现小车运动的精确控制。
(1)速度控制策略
针对小车的速度控制,本设计采用PWM调速的方式。通过控制PWM信号的占空比,可以调节电机的转速,从而实现小车的速度控制。我们可以根据用户的遥控指令,动态调整PWM信号的占空比,使小车以不同的速度运动。
(2)方向控制策略
对于小车的方向控制,本设计利用双H桥电路的正反转功能。根据用户的指令,控制相应的引脚状态,以实现小车的前进、后退、左转、右转等运动方式。
综合考虑速度和方向控制,我们可以制定相应的控制算法,根据用户的指令实时调节电机的转速和方向,从而实现小车在不同情况下的灵活、稳定的运动。
这些控制策略将在后续的系统测试中进行验证,并根据实际效果进行调整和优化,以确保小车能够准确响应用户的遥控指令,实现精准的运动控制。
4 传感器与检测系统设计
4.1 传感器选型及性能分析
在无线遥控小车设计中,选择合适的传感器至关重要,以下是根据前文内容制定的传感器选型及性能
在传感器选型中,红外传感器 (TCRT5000)常用于近距离障碍物检测,性价比高,检测距离适中,响应速度快。超声波传感器 (HC-SR04)检测距离远,精度较高,适用于远距离障碍物检测。光电传感器 (TCRT1000)常用于路径跟踪,检测距离较近,精度高,适用于检测地面线条或边缘。陀螺仪/加速度计 (MPU6050)用于测量小车的姿态和加速度,可以帮助实现平稳的运动控制。温湿度传感器 (DHT22)则常用于监测环境温度和湿度,可以帮助小车适应不同的工作环境。
4.2 传感器信号采集与处理
在无线遥控小车设计中,传感器的信号采集与处理是确保小车能够准确感知周围环境并做出相应决策的关键环节。针对不同的功能需求,本研究设计了相应的信号采集与处理方案。
针对障碍物检测功能,本设计选用了TCRT5000红外传感器和HC-SR04超声波传感器。TCRT5000红外传感器能够有效检测近距离障碍物,其模拟输出经过单片机的模拟输入通道采集后,经过滤波和特征提取等处理,可以用于判断小车前方是否存在障碍物。
以上传感器的输出信号经过采集后,需要进行数据解析、校准、滤波和特征提取等处理,以获取有用的信息并进行有效的决策。通过有效的传感器信号采集与处理,可以提高小车对周围环境的感知能力,实现更智能、更可靠的运动控制和环境适应能力。
5 系统测试与性能评估
5.1 测试方案制定
在系统测试阶段,需要确保无线遥控小车各项功能的正常运行,并评估其性能表现。测试方案应涵盖以下内容:
(1)功能测试:测试小车的基本功能,包括前进、后退、左转、右转等运动控制功能,以及障碍物检测、路径跟踪、环境监测等辅助功能。
(2)稳定性测试:测试小车在不同工作环境下的稳定性,包括室内、室外、光照条件良好和恶劣等情况下的表现。
(3)通信可靠性测试:测试无线遥控系统的通信可靠性,包括信号传输距离、抗干扰能力、信号丢失率等指标。
(4)能耗测试:测试小车在不同工作状态下的能耗情况,评估电池续航时间,并提出优化建议。
6 评估与总结
在完成各项功能测试后,根据测试数据及实际表现,对无线遥控小车的性能进行评估,并提出以下优化建议:
(1)稳定性评估:在极端光照条件下,部分传感器可能会出现误判,导致小车运动不稳定。后续设计会考虑增加光敏传感器,以提高对光照变化的适应能力。同时,小车在不同地形下表现稳定,但在特别崎岖的地形下可能会出现颠簸。考虑优化悬挂系统以提高对崎岖地形的适应能力。
(2)通信可靠性评估:在信号传输距离较远或存在干扰源时,可能会出现信号丢失的情况。后续考虑增加信号放大器或采用更高频段的通信频率,以提高信号覆盖范围和抗干扰能力。另外,根据测试数据,电池续航时间可能无法满足长时间使用的需求。后续会继续优化控制算法,降低功耗,并考虑采用更高容量的电池或设计可充电的电源系统。
参考文献:
[1]李建成, 王功喆, 刘春瑞. 基于单片机的无线遥控智能小车的设计与制作[J]. 科学技术创新, 2021, (01): 169-170.
[2]孙恒, 谷君豪, 罗红梅, 刘亮, 孟德强. 无线遥控小车的设计与实现[J]. 汽车实用技术, 2020, (15): 25-28.
[3]张翠云. 基于单片机的无线遥控小车设计与实现[J]. 机电工程技术, 2020, 49 (07): 184-186.
[4]温丽华. 基于蓝牙技术遥控小车的设计与实现[J]. 计算机产品与流通, 2019, (12): 111.
[5]马庆磊, 陈娜, 潘娜娜. 基于单片机的多功能智能遥控小车的设计[J]. 内蒙古煤炭经济, 2019, (19): 214.

 京公网安备 11011302003690号
京公网安备 11011302003690号


