



- 收藏
- 加入书签

NP型椎弓根置钉瞄准器钻孔位置误差研究
 打开文本图片集
打开文本图片集




摘要:目的 为量化NP型椎弓根置钉瞄准器在使用过程中产生的钻孔位置误差,为置钉方案的选择提供理论判据。方法 通过术前建立动态安全通道的方式,框定钻孔误差两个置钉方向角的极限偏差范围。简化相邻椎体间相对运动的物理模型,以数学建模的方式推导其内在联系。结果 列出了常用椎体椎弓根置钉方向角的极限偏离角度,给医生在术前选择置钉方案提供了参考。建立了因呼吸引起的两个置钉方向角误差模型,以统计数据值对模型进行了可靠性验证。结论 不同椎体有适用于自身的置钉方案,建议C4~C7、T9、T1、T2、T10和L2~L5椎体上优先使用NP型椎弓根置钉瞄准器置钉,能有效提升手术响应速度、减少肌肉剥离、减轻患者受到的手术伤害。
关键词:椎弓根置钉;瞄准器;钻孔误差;误差模型;呼吸
中图分类号:R318.6 ,TH781 文献标识码:A
Abstract: 【Objective】 To quantify the drilling position error caused by NP-type pedicle nail sight and to provide theoretical criteria for the selection of nail placement scheme. 【Methods】 By establishing a dynamic safety channel before operation, the limit deviation range of the two direction angles of the drilling error was framed. The physical model of relative motion between adjacent vertebral bodies is simplified, and the internal relationship is derived by mathematical modeling. 【Results】The limit deviation Angle of pedicle nailing direction in common vertebral body was listed, which provided a reference for doctors to choose the nailing plan before operation. The error model of two nail placement directions caused by respiration was established, and the reliability of the model was verified by statistical data values. 【Conclusion】Different vertebral bodies have their own suitable nailing schemes, and it is recommended that the NP-type pedicle nail sights should be used first on the vertebral bodies of C4~C7, T9, T1, T2, T10 and L2~L5, which can effectively improve the speed of surgical response, reduce muscle stripping, and alleviate the surgical injury of patients.
Keywords: Pedicle nail; A sight; Drilling error; Error model; Breath
NP型椎弓根置钉瞄准器又称导航模板或导板,是以相邻椎体的两侧曲面作为定位面而设计的,其实质是椎弓根自攻螺钉底孔的钻模,其本体一般是基于FDM-3D打印技术制成[1-3]。先行规划出的椎弓根置钉通道直径、位置、方向等参数是瞄准器设计的主要依据[4-5],传统的导航模板置钉一般是与自身椎体充分贴附后进行置钉的结构,定位面在自身椎体上,不会因椎体间的相对运动而产生钻孔位置误差[6]。当定位面与进钉点相距较远或椎弓根置钉方向比较刁钻,在保证导管合理长度的前提下,瞄准器的结构尺寸需要加大,这样既不利于微创,3D打印制造耗时也相应越长,此时有必要考虑使用NP型椎弓根置钉瞄准器。由于检测和手术体位不同或呼吸运动造成椎体间的相对位移会影响定位精度[7-9],这时相邻椎体定位曲面相对于目标椎体椎弓根的位置是实时浮动的,NP型椎弓根置钉瞄准器的瞄准精度会受到影响[10-11]。文献[8]表明体位对脊柱椎骨相对运动的影响比较微弱,针对使用NP型椎弓根置钉瞄准器的不足,本研究主要研究了呼吸运动对瞄准器钻孔位置误差的影响。
1 NP型椎弓根置钉瞄准器
1.1 结构设计
文献[1]提供了NP型瞄准器结构设计和制造的方法,给出了相应的3D打印误差模型,结构如图1所示。该种瞄准器结构尺寸小、响应速度快、3D打印时间短,同时也适用于目标椎骨破坏、病变、畸形等不能以自身椎体曲面作为定位面进行置钉的情况。
2 定位原则的制订
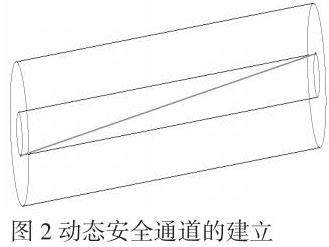
2.1 动态安全通道的建立
椎弓根螺钉内固定手术的成败关键在于能否准确的将自攻螺钉经椎弓根拧入椎体,并不穿破椎弓根皮质[12]。先行规划出的椎弓根置钉通道是按椎弓根最狭窄处的直径作出的最大内接圆柱体,为求取钻孔误差的极限偏差范围,以椎弓根皮质骨厚度和按有关国家标准选取的螺钉半径之和为偏距值向内作出最大内接圆柱体的同轴圆柱体,即为螺钉轴线的动态安全范围。如图2所示。
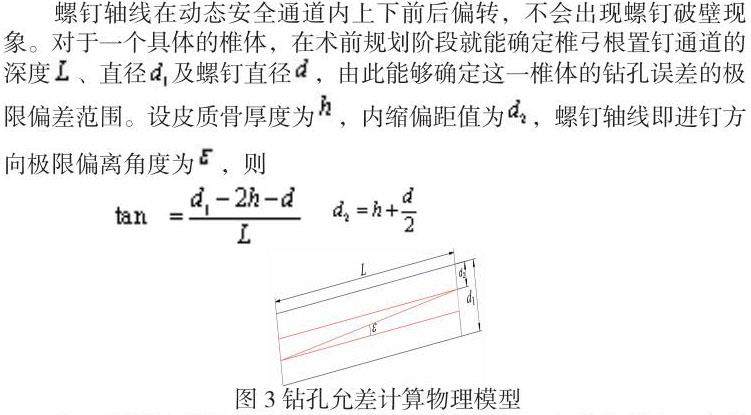
2.2 钻孔允许误差的计算
术中呼吸运动引起两个相邻椎体相对运动后,定位在其中一个椎体上的瞄准器导管方向也会跟着相对运动。在方向角度变动后,进钉点的位置随之也发生了一定改变,但都是在以上求取的动态安全通道范围内,不会对置钉产生根本性的影响,故本研究只对方向角误差做了误差模型分析。
3 术中呼吸对NP型瞄准器方向角的影响
由于呼吸运动会造成椎体间的相对运动使先行规划的螺钉置钉方向产生一定的角度偏差,为量化研究相应的方向角误差,根据临床常用椎弓根螺钉进钉角度推导相应的螺钉空间方向角变化。
3.1 临床进钉角度
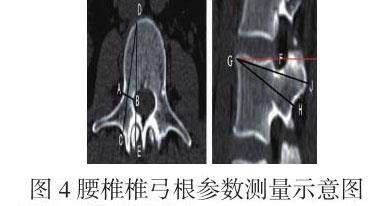
置钉角度:(1)TSA角(Transverse Screw Angle):是指水平面椎弓根螺钉植入的角度,为一可变角度,随着术者的定位点及外展角度而变化。(2)SSA角(Sagittal Screw Angle):是指矢状面椎弓根螺钉植入的角度。以与椎体上下终板平行为零度,斜向上终板为正角,斜向下终板为负角,也是可变角度。两角如图4中CDE与HGJ所示。置钉时水平面及矢状面角度决定着螺钉的进钉方向,术中术者如何准确的把握这两个角度是手术成功的核心所在[13]。
传统的导航模板因定位在自身椎体上,以上下终板为基准线测量矢状角能够对椎弓根进行置钉操作。引入呼吸的影响后,SSA角为更好的量化表示呼吸引起的椎体上下浮动后的角度变化,在矢状面上以水平面为基准线,引入角FGH , 表示螺钉在矢状面上的角度变化。
3.2 置钉方向角误差模型的建立
3.3 瞄准器定位策略的选择
与的角度可通过测量医学图像数据库中的呼气与吸气两个极限位置的与的相对值计算得出。以下给出经课题组测量与计算后得到的置钉策略建议。为追求微创与快速响应,在导管长度不变的情况下,保证定位精度,给出以下策略:
策略1:建议C4、C5、C6、C7、T9、T1、T2、T10、L2、L3、L4、L5椎体优先将定位面设定在相邻椎体上,使用NP型椎弓根置钉瞄准器置钉。
策略2:建议T2、T4、T7缩小螺钉直径,牺牲一部分生物力学性能,扩大允许误差,可以考虑使用NP型椎弓根置钉瞄准器定位。
策略3:其余椎体因呼吸导致的钻孔误差过大,超过极限偏离角度,建议将定位面设定在自身椎体上,使用SP型椎弓根置钉瞄准器置钉。
4 小结
NP型椎弓根置钉瞄准器为椎弓根螺钉内固定术提供了一种新的解决方案,解决了因目标椎骨破坏、病变、畸形等不能以自身椎体曲面作为定位面进行置钉的情况。相较于之前的SP型瞄准器,缩小了结构尺寸和3D打印的时间,减少手术创伤的同时有效提升了手术响应的速度,为内固定术的微创医疗和精准医疗提供了可靠的手段支撑。椎体间的相对运动在一定的程度上限制了NP型瞄准器在全部椎弓根上的应用,受呼吸影响大的椎体只能使用定位在自身椎体上的SP型瞄准器。基于文献统计数据和课题组测量数据,给出了3种置钉策略,在一定程度上解决了置钉方案的快速选择问题。最后,置钉方向角误差数学模型的建立在术前规划阶段能为医生提供了钻孔偏差的预测,为医生选择置钉方案提供依据,同时也为未来的学者研究手术机械人的呼吸补偿奠定了基础,未来的研究可能有更加精确的建模方法,行之有效的解决呼吸误差问题。总之,医工融合是未来医疗行业发展的趋势,对疾病的诊断和治疗水平的提高有着十分重要的意义,持续不断的研究和创新,能为医疗行业带来巨大的价值。
参考文献
[1]秦元帅. FDM成形椎弓根置钉瞄准器结构工艺性及精度控制研究[D].南华大学,2017.
[2]叶书熙,陈勤,伍耀宏,等. 3D打印导板技术在复杂上颈椎手术中的应用[J]. 医疗装备,2023,36(17):63-65.
[3]朱军,牛国旗,李超. 3D打印技术在脊柱畸形矫形手术中的应用进展[J]. 齐齐哈尔医学院学报, 2021, 42(08): 690-694.
[4]王辉,王连雷,吴天驰等.人工智能辅助设计3D打印手术导板在脊柱侧凸矫形术中的应用[J].山东大学学报(医学版),2023,61(03):127-133.
[5]熊亮,周霖,曾蕾,等. 螺旋CT三维重建辅助胸腰椎骨折椎弓根钉置入的准确性评价[J].中国CT和MRI杂志, 2019, 17(09): 136-139.
[6]李超,牛国旗,蒋维利,等. 个体化3D打印导向模板辅助胸腰椎椎弓根螺钉置入在强直性脊柱炎中的应用研究[J].中国骨伤, 2020, 33(07): 649-654.
[7]Du W, Zou D, Zhang J, et al. Guide wire displacement in robot-assisted spinal pedicle screw implantation[J]. Videosurgery and Other Miniinvasive Techniques, 2021, 16(3): 526-535.
[8]Jiang Z, Sun Y, Zhao S, et al. A model of vertebral motion and key point recognition of drilling with force in robot-assisted spinal surgery[C]. International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017: 6455-6462.
[9]刘亚军,曾成,范明星,等. 俯卧位机器人辅助脊柱外科手术中呼吸运动导致椎体位移评估与测量[J]. 临床军医杂志, 2016, 44(10): 1015-1018.
[10]Luo Y, Li Z, Jiang S, et al. A novel fluoroscopy‐based robot system for pedicle screw fixation surgery[J]. The International Journal of Medical Robotics and Computer Assisted Surgery, 2020, 16(6): 1-8.
[11]管卫星.临床动态环境下脊柱生物力学建模与机器人运动补偿研究[D].哈尔滨工业大学,2019.
[12]潘大洋,刘炯,龙浩等.机器人导航伤椎置钉固定胸腰椎骨折[J].中国矫形外科杂志,2023,31(24):2278-2281.
[13]魏兵,常山.脊柱骨折矢状面不同角度置钉方式的有限元分析[J].中国组织工程研究,2022,26(06):864-869.
[14]李必文,谭文甫,何彬,等. 手持式颈椎椎弓根螺钉置钉瞄准器的研制及意义[J]. 中国脊柱脊髓杂志,2006,16(4):287-290.
[15]洪锋泽,彭超. 藏族与汉族成人腰椎椎弓根CT测量比较[J].中国矫形外科杂志, 2023, 31(07): 595-600.
[16]韩华,项燕,韩佳栩,等. 不同国家人群胸椎椎弓根解剖结构的对比研究[J]. 中国临床解剖学杂志, 2018, 36(03): 252-258.

 京公网安备 11011302003690号
京公网安备 11011302003690号


