



- 收藏
- 加入书签

手持盘式砂光机握柄优化设计研究
 打开文本图片集
打开文本图片集





摘要:手持盘式砂光机的握持方式对其握柄的人机适应性与舒适性起到决定性作用。为缓解用户握持时所产生的肌肉疲劳程度,提升握柄的人机适应性与舒适性。针对现有手持盘式砂光机常用的两种握持方式,采用表面肌电法对上肢的尺侧腕屈肌、肱三头肌和三角肌的疲劳情况进行量化,通过动态与静态模拟实验了解两种握持方式对疲劳程度的影响,确定手持盘式砂光机的最优握持方式。结果表明,力量抓握为最优握持方式,同时尺侧腕屈肌和肱三头肌的肌肉负荷较大,疲劳风险较高。
关键词:手持盘式砂光机;握持方式;表面肌电
1 引言
手持盘式砂光机是一种由电动机驱动,带动砂纸或砂布对工件进行打磨的常用木工手持电动工具,俗称打磨机。它主要用于平面、曲面和不规则形状的木材、金属、塑料等材料的抛光和精加工。但现有砂光机不正确的握持和发力方式,导致健康问题的日益凸显,主要表现为肌肉疲劳、酸痛和拉伤等肌肉骨骼疾患(WMSDs)。据统计,在木制家具作业人员中,WMSDs的发生率在26.60%~53.9%[1]。其中,打磨工人在肩部和手部出现WMSDs的发生率分别高达19.8%和14.66%[2]。以上数据清晰地表明了当前手持盘式砂光机设计亟待优化的现状。
手持盘式砂光机的握持方式对其握柄的人机适应性与舒适性起到决定性作用。相关研究将手部与握柄间不同的连结方式归纳为10种[3],手持盘式砂光机的常用握持方式为抓握和力量抓握,二者都属于完全握持,需要手部与手臂同时用力,需要将关节和肌肉长时间保持在特定位置,容易导致施力肌肉的持续发力,进而导致肌肉疲劳。因此,为缓解用户握持时所产生的肌肉疲劳程度,提升握柄的人机适应性与舒适性,本文采用表面肌电法对上肢各肌肉疲劳情况进行量化,通过模拟实验了解不同握持方式对疲劳程度的影响,确定手持盘式砂光机的最优握持方式。
2 对象和方法
2.1 被试选取
由于手持盘式砂光机的主要使用人群为成年男性,因此在实验中招募15名成年男性作为实验被试人员,以减少实验误差。所有实验被试人员均无上肢肌肉或骨骼损伤和疾病史,并且在参与实验前24小时内没有进行剧烈运动。
2.2 变量描述
本节旨在探讨不同握持方式对上肢疲劳发展的影响。手持盘式砂光机的常用握持方式为抓握和力量抓握两种,因此将自变量确定为抓握和力量抓握两种握持方式。在现有工作环境中,小型手持盘式砂光机具有功能适用性强的特点,其使用范围最为广泛且用户最多,两类小型手持盘式砂光机均为分别为抓握和力量抓握的代表,且均为单手操作,没有辅助手的干扰。因此选取两类小型手持盘式砂光机的不同握持方式作为典型样本。将以抓握的形式使用的砂光机设定为握持样本A,将以力量抓握的形式使用的砂光机设定为握持样本B。样本图片如图1所示。样本A与样本B所使用的材质一致,均为ABS,表面具备同样的磨砂质感。通过查阅产品手册可知其表面粗糙度皆为1.5μm,故两个样本的表面粗糙度一致。通过在样本A内部填入铁砂,使二者重量保持一致。
2.3 实验设备
表面肌电信号采集及分析设备为多通道生理信号采集系统(MP150,BIOPAC Inc, GC, USA)
2.4 测试肌肉选择
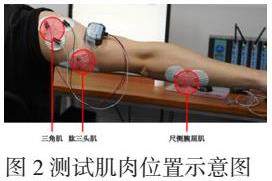
手部的操作为手指屈伸和腕部移动,主要测试肌肉为三角肌前束、肱三头肌以及前臂尺侧腕屈肌,肌肉位置如图2所示。相关研究表明,三角肌前束控制肩关节的内旋和前屈,肱三头肌负责伸肘关节。三角肌前束在水平推动中发挥重要作用。三头肌在推动过程中负责控制肘关节旋转,进而保证关节的稳定性。尺侧腕屈肌在屈肘关节过程中承担重要作用 [4]。通过预实验确认,握持时尺侧腕屈肌、肱三头肌、三角肌为主要发力肌肉。因此,选择这三块肌肉作为测试肌肉并进行数据测量。
2.5 实验程序
采用模拟实验的方式,模拟其配重及施力方式和方向,最后可有效得出两种握持方式的优劣。手臂角度的变化会引起发力的变化,影响上肢肌肉活动的变化和肌肉疲劳的情况。实验主要分为以下四部分内容:
(1)预实验:在打磨过程中,需要有垂直向下和水平移动的推压力。为进一步确定实际使用时负荷情况,使得模拟实验尽可能接近真实情况,在预实验中采用不同配重条件的方式进行比较确定。其中,配重将采用不同重量的铸铁杠铃片。在预实验中,通过比较真实打磨情况和模拟情况下不同配重条件下的肌电信号,发现在2kg的配重条件下,各肌肉RMS值与真实打磨过程中的各肌肉RMS值最为接近。因此,选择2kg的配重条件进行后续模拟实验。为模拟真实打磨情况下向前下方的发力,采用如图3所示的实验方案,产生向斜后上方的拉力。具体方案为:将2kg配重用绳子通过定滑轮固定在支架上,通过调整支架与桌面距离,保持绳子与水平面的夹角为30度,以控制受力方向和大小不变,并握持高度设置为75cm。
(2)MVC测量:不同被试间存在较大的个体力量差异,进而影响肌电信号的大小。因此需要在实验开始时收集肌肉最大主动收缩(MVC)时的肌电信号,以便将后续模拟实验中肌电数据标准化,以MVC的百分比来表示肌肉活动情况。图3介绍了测试各肌肉MVC的具体动作。在实验前需对被试进行指导,要求被试在5s内持续使出最大肌力,每个测试动作分别重复三次,从中选取最高振幅值作为最大主动收缩值,以用于后续模拟实验肌电数据的标准化。
(3)动态模拟:被试被要求保持双脚间距50cm-60cm,与桌面夹角20°-30°,躯干前倾10°-20°,以模拟真实打磨场景站姿。在抓握和力量抓握两种手部姿势下分别握持两款样本,从右肩垂直投影点处向身体左侧推移,直至右臂最大臂展。在过程中要求被试保持样本打磨面与桌面的贴合。推拉速度由实验工作人员根据秒表予以指导,3秒由右向左发力推移,3秒将手臂缩回,共循环重复7次。
(3)静态模拟:在动态实验中,各肌肉间歇发力,因此在短时间内无法做到疲劳积累。因此,为进一步了解长时间工作后各肌肉的疲劳状况,设计了静态实验,通过让肌肉不间断发力以加速疲劳发展。静态模拟实验方案如图4所示。根据预实验结果,将握持时间确定为5分钟,在有较为明显的疲劳感的同时,保持握持难度的合理性,在该时长下,被试肌肉已出现轻微震颤。在实验中要求被试保持不动,保持握持高度为75cm,让肌肉处于静态等长收缩状态。
具体实验流程如下:首先向每位参与者简要说明实验的目标和任务流程。在执行任务前,先获取基本信息,如年龄、身高、体重和手型尺寸等。在完成任务前测试和电极安装后,指导被试进行MVC测量。且在测量结束后,休息不少于15分钟至被试再次执行任务时,肌肉没有疲劳感,以避免疲劳累计所造成的实验误差。而后开始执行主要任务,包括七次循环的动态模拟实验和5分钟静态模拟实验。被试需分别以两种握持方式执行任务,包括以抓握的方式握持样本A和以力量抓握的方式握持样本B。每次执行任务时,都会记录前臂肌电信号,每次模拟实验间至少休息15分钟至被试再次执行任务时,肌肉没有疲劳感,以避免疲劳累计造成的实验误差。每位被试的实验持续1.5小时,包括前期准备、任务执行和休息时间。
2.6 实验数据处理
首先对15名被试的肌电信号进行预处理,进行20-500Hz的滤波处理。标准化RMS值的计算具体步骤如下:首先,依照前文设计的MVC测量方法测得各肌肉的最大主动收缩时的RMS值,记作MRMS。而后,求得各任务中肌肉的时域指标ARMS与MVC测量所得均方根MRMS 的比值,即可得到肌电均方根百分比,即为标准化RMS值。具体公式如4-1式。
在动态模拟实验的数据,提取7次循环的中间5次推出过程进行肌电分析,且拉回过程不做处理。将每次推出过程肌电信号进行处理,计算5次推出过程的总体平均标准化RMS值,对其进行方差齐性检验和T检验以比较两种握持方式对总体肌电信号造成的影响。
在静态模拟实验中,因肌肉可能未处于稳定状态。实验中前1.5s和后1.5s不做处理。取余下时间中的前5s和后5s的肌电信号,计算得到各肌肉疲劳前后平均标准化RMS值。为直观比较疲劳前后数据变化,绘制各肌肉疲劳前后标准化RMS值的箱型图。
3 结果
动态模拟实验中,握持两款样本时,各肌肉的平均标准化RMS值及方差分析结果如表3所示。
握持两款样本时尺侧腕屈肌、肱三头肌、三角肌的肌肉活动水平均存在显著差异。从平均值看,样本A抓握的握持方式相较于样本B的力量抓握,尺侧腕屈肌、肱三头肌、三角肌的标准化RMS平均值更大,并且抓握样本A时,尺侧腕屈肌和肱三头肌的标准化RMS平均值分别达到了28.85%和31.85%,远高于力量抓握样本B时的22.26%和25.66%,说明在进行动态运动时抓握的握持方式需要更大的肌肉活动。三角肌的标准化RMS值整体较低,而尺侧腕屈肌和肱三头肌保持较高的标准化RMS值,其肌肉活动更高,因此打磨过程中更容易引起尺侧腕屈肌和肱三头肌的肌肉疲劳。
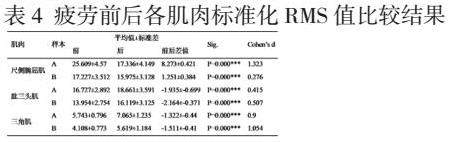
静态模拟实验中,总体肌电信号的平均标准化RMS值和T检验结果如表4所示。握持两种样本时疲劳前后各肌肉的数据显著性结果均小于0.05,因此均存在显著性差异。
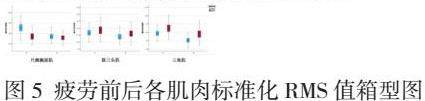
各肌肉疲劳前后标准化RMS值结果整理于图5,箱型图数据包括最大值、75百分位数、中位数、25百分位数和最小值,握持两种样本时疲劳前后各肌肉的数据变化较为直观。
根据上图可知,比较疲劳前后各肌肉的标准化RMS值变化情况,发现在静态握持动作下,肱三头肌和三角肌标准化RMS值增加,说明肱三头肌和三角肌出现疲劳。而在握持两种样本时,尺侧腕屈肌的标准化RMS值均有所下降。比较握持样本A和握持样本B的标准化RMS值,可发现在握持样本A时的尺侧腕屈肌、肱三头肌和三角肌疲劳前后标准化RMS值均大于握持样本B时的数据,这说明在抓握握持时三个部位的肌肉负荷均大于力量抓握的握持方式,也具有更高的肌肉疲劳风险。
4 讨论
在动态实验中,通过对比两种握持方式的标准化RMS值,发现以抓握的方式握持样本A时肱三头肌的标准化RMS值达到了31.85%,为所有数据中的最大值。且握持样本A时尺侧腕屈肌和肱三头肌的标准化RMS值均大于握持样本B时。
在静态实验中,通过比较两种握持方式的标准化RMS值,以抓握的方式握持样本A时的三个部位肌肉标准化RMS值均大于以力量抓握的握持方式握持样本B时;通过比较疲劳前后的标准化RMS值,发现肱三头肌和三角肌的标准化RMS值增大,而尺侧腕屈肌的标准化RMS值呈现下降趋势。握持样本A和样本B时,尺侧腕屈肌标准化RMS平均值分别为25.61%和17.23%。而有研究表明,当标准化RMS值大于15%-20%时,收缩水平较高,会导致耐力时间迅速缩短。因此在握持两款样本时,尺侧腕屈肌一直处于较高的收缩水平,导致其耐力时间缩短,而长时间的持续收缩可能超过了尺侧腕屈肌的持久力,进而导致活动水平下降。这说明在打磨过程中,肌肉收缩水平较高,确实存在肌肉疲劳的风险。
5 结论
(1)力量抓握为最优握持方式。以力量抓握的方式握持时,上肢各肌肉的肌电信号均小于以抓握的方式握持手持盘式砂光机时。
(2)在手持盘式砂光机使用过程中,尺侧腕屈肌和肱三头肌的肌肉负荷较大,疲劳风险较高。三角肌的肌肉负荷较小,疲劳风险较低。
参考文献
[1]曹扬,王菁菁,张蔚等.《肌肉骨骼损伤情况调查问卷》应用于搬运作业人群的信效度评价[J].中国工业医学杂志,2017,30(02):87-93.
[2]杨亚君,石雄杰,王忠旭等.木制家具作业人员工作相关肌肉骨骼疾患及其影响因素[J].工业卫生与职业病,2024,50(01):10-14.
[3]王继成.产品设计中的人机工程学(第二版)[M]. 化学工业出版社,2011:112-113
[4]孙鑫.穿戴式上肢柔性外骨骼系统研究[D].哈尔滨工业大学,2019.

 京公网安备 11011302003690号
京公网安备 11011302003690号


