



- 收藏
- 加入书签

一种基于输电线路上无害驱鸟装置的设计
 打开文本图片集
打开文本图片集

摘要——输电线路在运行中,可能会遭受到鸟害,其飞行、筑巢、泄粪等行为给电力系统安全平稳运行带来了巨大的挑战,基于此,本文设计了一种无害驱鸟的智能控制装置,整体运行分为探测、跟踪、驱赶三大过程。硬件部分主要由MPPT、中央控制器、北斗终端、雷达探测器、驱鸟系统5大模块构成,分别起着光伏供电、高效调控、精确定位、全方位探测、无害驱鸟等作用,尤其在驱鸟系统中,白天选择扬声器驱赶、夜间选择激光发射器驱赶,既达到了无害驱鸟的效果,又避免了夜间产生噪声污染;软件部分采用MATLAB、ATP软件进行方案验证,设计跟踪算法对鸟类的飞行轨迹进行预测、判断、追踪,附加PID计算子模块数据输出、输电线路行波故障定位,仿真图像表明了该系统能有效监测鸟类的整个入侵输电线路的过程。经过研究分析,该装置在跟踪响应、驱鸟方式等方面对输电线路的保护力度有着创新性。
关键词:STM32F767;行波定位;雷达探测;全方位追踪;无害驱鸟
0 引言
全球范围内,因鸟类与电力设施发生碰撞或短路引发的事故时有发生,这不仅对电力供应产生严重的打击,更导致了大量鸟类的死亡[1]。鸟类的飞行、筑巢、泄粪等行为会引发输电设备损坏或造成线路跳闸、故障停运等严重后果,传统的驱鸟装置主要有防鸟挡板、防鸟网、防鸟刺、防鸟拉线、人工栖鸟架等,虽然起到了一定的作用,但是也可能会出现积累鸟粪、雨季造成绝缘子污染、拆装不便等不良问题,满足不了当今输电线路安全平稳运行的要求。本文通过设计一种在输电线路上新型且无害的驱鸟装置,以STM32F767为中央控制器,MPPT光伏发电,配备有BMS电池管理系统的供电电池,北斗模块带有行波定位的功能,装设5个小型雷达探测鸟类,可对入侵的鸟类进行定位、追踪。为了避免噪声污染和保证激光发射效果为目的,系统会对驱鸟设备进行自动控制,在白天如果有鸟类入侵,系统会自动播放扬声器进行驱鸟,在夜间对入侵鸟类发射低功率激光,该激光特定波长为532nm的绿色激光,能无害驱鸟进而有效保障输电线路安全运行,弥补了传统驱鸟装置的不足。
1 系统总体设计
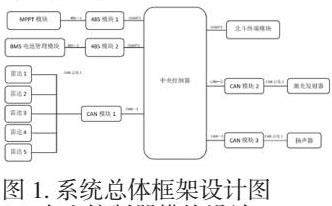
本文设计的系统首先通过中央控制器模块与MPPT模块及BMS电池管理模块之间的通信进行能量管理,CAN总线1与五个雷达模块构建CAN通信总线网络,实现对鸟类的发现跟踪。中央控制器通过485模块1去控制MPPT模块工作启动状态,485通信模块同时起着转换电平信号的作用,从485模块2获取BMS和MPPT运行中的故障数据。北斗终端模块可以作为传输行波的载体,承担着定位和检测输电线路故障的功能,中央控制器再通过两个CAN模块根据白天黑夜有选择性地启动扬声器、激光发射器。整个过程实现了对鸟害的有效驱赶,且不会对鸟类产生伤害。系统总体框架设计如图1所示。
1.1中央控制器模块设计
STM32F767具有高性能的Cortex-M7内核,具有低电压、低功率的优点,同时具备同步通信功能,提供8路串口,符合多种通信标准。为了系统的稳定性、可控性,供电系统选择了带485通信的MPPT模块和BMS模块,MPPT模块的485_A和485_B端子分别连接到485模块1的485-A和485-B端子,然后再通过485模块1连接到作为中央处理器的STM32F767核心板的USART2-TX和USART2-RX管脚上。BMS模块也采用485通信,485模块2也将BMS模块的485-A和485-B与STM32F767核心板中央处理器的USART3-TX和USART3-RX联系并进行485电平与TTL电平转换。
1.2供电模块设计
能源系统有两条外部输入源,外部光伏板接入系统的光伏接口,装置通过系统内部的MPPT模块,将太阳能电池板产生的电能进行高效转化,为电池充电或者直接为系统供电,电池组通过系统的电池接口接入,系统通过485通信方式控制MPPT模块和BMS模块给电池充电,如果太阳光不足或者在夜晚时,BMS模块控制电池主动放电,为系统提供足够的能量。该装置根据不同的功能模块供电的电压及功耗需求,其供电系统可分别输出12V、5V、3.3V电压,供给不同的系统子模块使用,产生的逻辑关系如下:12V稳压模块的输入端连接的是MPPT模块与BMS端的供电母线,将高电压转化为系统子模块使用的12V低电压,再进行稳压输出,最后通过5V和3.3V稳压模块产生5V和3.3V。
1.3定位模块设计
本文定位终端系统选择了5V供电串口通信类型的北斗模块,其具有使用广泛、技术成熟、资料齐全易于开发等特点,5V稳压模块为其提供5V供电,北斗模块串口通信接口的USART_TX1、USART_RX1分别连接到充当中央处理器功能的STM32F767核心板的USART1_TX、USART1_RX。
1.4探测模块设计
12V稳压模块为五个雷达模块提供12V供电,CAN通信模块1连接中央处理器的stm32f767核心板的CAN1_TX及CAN1_RX,五个雷达通信的CAN通信线与CAN通信模块1的CAN_H和CAN_L连接起来形成CAN总线,并进行MCU的TTL电平与CAN总线电平的逻辑转换,在探测方式上,紧跟时代潮流,利用最新的技术研究成果,选择了在探测领域广泛使用的技术新星——雷达。探测模块的通信和控制方式上,本文采用CAN通信方式,将五个CAN通信的雷达模块通信线连接起来组成CAN总线。通过无线电侦测与雷达的协同,雷达在无线电侦测方位信息的引导下,对重点区域进行搜索,可减少雷达搜索时间,提高发现概率,并且降低鸟类等其他“低慢小”目标造成的虚警;雷达与光电红外的协同,能提升目标定位精度和综合航迹数据率[2]。 CAN通信总线具有完整的硬件及软件架构及协议,均有完善的功能及使用考究,其具有高速、高稳定性、高抗干扰能力的特点,总线架构可将许多功能节点连接在同一通信线上,形成通信网络。如果单一节点失效后,并不会对系统造成影响,系统仍能够稳定运行。5颗一样的小型雷达作为探测模块,东南西北中上下高低立体排布呈现72°,各自具有相同的功能,考虑到1颗雷达探测角度达不到180°,所以配备5颗雷达进行视角的补盲,使得探测区域更为广阔,能实现对鸟类全方位有效追踪。
1.5驱鸟模块设计
驱鸟模块采用CAN通信方式进行通信控制,通过CAN通信模块与STM32F767核心板央处理器进行通信,12V稳压模块输出的12V供电,其中进行CAN通信电平转换的CAN通信模块与雷达部分保持一致,采用3.3V供电。
(1)在白天,一旦有鸟类靠近杆塔,雷达就会捕捉到鸟类入侵的信息,从而自动播放扬声器,扬声器会发出鸟类同类的悲鸣、天敌的叫声或者超声波,从而起到驱鸟的作用,每天夜晚扬声器准时关闭,次日清晨准时开启,当且仅当鸟类入侵时才会播放,以此来避免产生对环境的噪声污染。
(2)激光发射器在5个小型雷达各安装1个,其功率设置在安全标准以内,通过发出醒目的绿色激光束,来保证激光发射器不会对入侵输电线路的鸟类产生危害。鸟类在晚上有活动比较频繁的时间段,且鸟类入侵具有明显的季节性,以写入代码的方式控制激光发射器的开启频率,同时在鸟类的集体迁徙时间增加开启次数。
1.6总体硬件电路设计
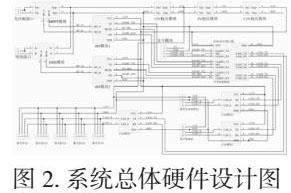
为实现系统的长时间自持运行,在研究分析后,选用以STM32F767为中央控制器可以构建一个完整而灵活的驱鸟系统。将中央控制器、供电、定位、驱鸟模块连接而成的系统总体硬件设计如图2所示。
2 系统软件设计
2.1 主程序设计
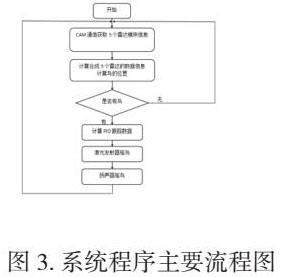
CAN总线信号的位时间决定了通信波特率,相关的寄存器配置参数有5个(Tseg1、 Tseg2、 Brp、 SJW、 Smp),而同一波特率往往有多种配置方式,不同的配置对信号同步的影响是不同的[3]。 本文在主程序中首先通过can总线使用can通信的方式,程序代码使用多任务技术,中央处理器利用雷达的通信协议依次读取五个雷达数据并临时保存,读取完成后,对5个雷达的数据进行计算合成,采集出完整的三维立体的雷达探测数据,之后对其探测到的数据进行相关的算法处理,进行图像识别并判断是否鸟类入侵安全保护范围,如果是,记录鸟类坐标,并将此作为参数传入跟踪驱鸟程序,标志位置位后,驱鸟子任务函数开始有选择性地启动驱鸟装置,如果不是则直接返回继续进行监控识别。系统程序主要流程如图3所示。
2.2 PID计算子模块
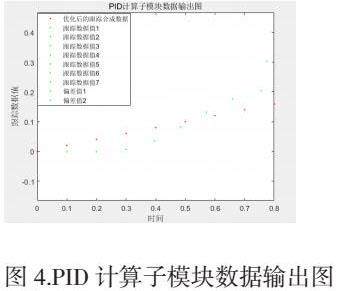
驱鸟子任务函数在收到完整的入侵输电线路鸟类的位置坐标,自动计算鸟的速度,开始使用PID算法跟踪飞鸟,计算得到系统跟踪中的速度及方向,然后根据计算值的速度及方向进行驱鸟操作,再通过CAN通信方式控制扬声器模块或激光发射器模块按照计算的速度及方向运行来实现驱鸟操作,雷达探测系统在开始跟踪后可自动优化追踪路径后显示出偏差值,再合成并获取最佳数据,最后进行PID输出。PID计算子模块流程如图4所示。
3 仿真与分析
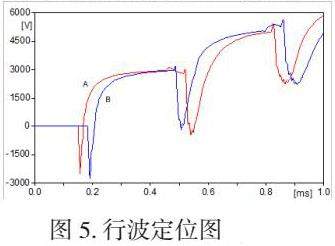
3.1 ATP行波定位
行波法定位的精度较高、耗时短且不受实际线路参数干扰[4],在定位领域有着广阔的前景。随着故障距离的增加,行波传播时间延长,即传播速度减小。这是因为行波在传输过程中会受到线路阻抗、电容等物理因素的影响,导致传播速度的变化[5]。鸟类大规模迁徙期间,入侵输电线路遭受“鸟害”后,线路参数发生较大的变化,行波定位输电线路故障后,间接地获取出鸟类的具体位置,也能够及时发现鸟类是否已经对输电线路造成危害,A、B端行波到达后,其定位结果如图5所示。
3.2基于MATLAB仿真的跟踪图象
雷达抗干扰效能评估是判断抗干扰策略是否有效的依据,以雷达性能在实施抗干扰前后的变化作为评价依据,可以有效地反映不同抗干扰策略的优劣[6],有利于掌握雷达系统追踪鸟类的效果。5颗一样的雷达东南西北中上下高低立体排布呈现72°。在这种架构下,雷达组网系统可以在单发多收、轮发多收和多发多收等多种模式下工作[7]。假设鸟类的飞行轨迹不变,在图中全用蓝色曲线表示,雷达追踪轨迹用红线表示。在理想的情况下,雷达探测系统追踪的轨迹与鸟类飞行的轨迹相对位置几乎重合,但实际情况中会受到诸多干扰因素造成误差,如天气和人为等因素,但是由于雷达探测技术的日趋完善,其影响并不大。在天气良好的情况下,雷达追踪鸟类的相对位置误差较低,但是在天气恶劣的情况下,雷达也能将入侵输电线路的鸟类全方位追踪,追踪效果略低,但从图中可看出,雷达探测轨迹全程都能覆盖住鸟类飞行的轨迹。其仿真结果如图6所示。
3.3 软件仿真分析
本文采用ATP软件行波定位仿真技术,能够精确定位鸟类入侵的点位,通过在MATLAB软件中写入本文设计的代码,实现了雷达探测、鸟类飞行轨迹的对比仿真,从上图可看出,5颗小雷达相互协调的追踪轨迹都做到了全方位覆盖鸟类飞行轨迹的作用。后续将在实际中获取最真实的参数,进一步提升动态性能,进而对目标快速准确地跟踪,以此来大大降低鸟害对输电线路的危害。
4 总结
本文设计了一种在输电线路上能无害驱鸟的装置。分别从硬件、软件两大部分实现了系统的功能,硬件部分进行了对分模块的电路设计,以及将分模块电路中对应的引脚分别连接起来,形成了以STM32F767为中央控制器的系统总体硬件设计图;软件部分通过ATP、MATLAB进行仿真分析,先进行了PID计算子模块的数据输出,定位与跟踪效果从仿真图像变化情况表明采用该装置能有效实现对鸟的监测、追踪、驱赶,整个过程既保护了鸟类的生命安全,也保护了输电线路的运行安全,有一定的使用价值和创新性,但是由于作者的时间和水平有限,还存在着许多的不足之处,一方面未做成实物在实际中进行验证,另一方面也可能存在错误,如行波定位的效果、MATLAB跟踪算法精准度的提高、驱鸟装置在输电线路中的最佳安装位置,还有待进一步探索,敬请广大读者批评指正。
5 基金项目
湖南省大学生创新创业计划训练项目(S202110548042)、湖南省教育厅科学究项目(22C0488)、武陵山生态农业智能控制技术湖南省重点实验室(ZNKZN2021-01)、湖南省教育规划项目(XJK23CGD031)。
6 作者简介:
张群桢(2001—),男,湖南邵阳人,本科生,研究方向:电力系统故障检测与电缆接头结构优化;
牛红军(1989--),男,通讯作者 (E-mail:honjun@ hhtc.edu.cn),河南项城人,讲师,硕士,研究方向:智能控制与电力系统自动化;
1.怀化学院物电与智能制造学院 湖南怀化 418000
参考文献
[1]罗刚,张山河,胡龙江,等.输电线路和500 kV变电站鸟害分析及防治措施[J].自动化应用,2023.
[2]王诗年,孙家平,郭琰.要地防护反无人机系统设计与实现[J].测控技术,2021.
[3]田东明,张晓宇,张广清,等.CAN总线信号同步研究与应用[J].汽车电器,2024.
[4]邓丰,祖亚瑞,黄懿菲,等.基于行波全波形主频分量的单端定位方法研究[J].中国电机工程学报,2021.
[5]宫春蕾.配电线路行波故障测距原理及应用初探[J].城市建设理论研究(电子版),2024.
[6]邢怀玺,邢清华.基于信号博弈的雷达抗干扰策略选择方法[J].军事运筹与评估,2023.
[7]张磊,罗迎,张群.雷达组网系统对抗有源干扰方法综述[J].信息对抗技术,2023.

 京公网安备 11011302003690号
京公网安备 11011302003690号


