



- 收藏
- 加入书签

基于机器视觉和语音转换的智能服务机器人
 打开文本图片集
打开文本图片集
摘要:随着人工智能技术的快速发展,智能服务机器人已成为服务业创新发展的重要方向。本文介绍了一种基于机器视觉和语音转换的智能服务机器人。该机器人融合了语音转换、自然语言处理及机器视觉等先进技术,能够通过语音、文字等方式与人进行自然交互,为用户提供咨询、导航等多元化服务。同时,机器人利用机器视觉技术实现对面部特征的识别与分析,并根据不同服务领域的问题模型提供自适应的语言模型术语,以满足多用户、多场景的使用需求。本研究旨在通过机器人的自动化和智能化服务,降低服务行业的运营成本,提高服务效率,并推动服务业的发展与创新。未来,该智能服务机器人有望在酒店、医疗、零售等多个领域发挥重要作用,为人们的生活带来更多便利。
关键词:智能服务机器人;机器视觉;自然语言处理;自主定位导航;多元化服务;
Abstract: With the rapid development of artificial intelligence technology, intelligent service robots have become an important direction for the innovative development of the service industry. This paper introduces an intelligent service robot based on machine vision and voice conversion. The robot integrates advanced technologies such as voice conversion, natural language processing, and machine vision, and can interact naturally with humans through voice, text, and other methods to provide users with diversified services such as consulting and navigation. At the same time, the robot utilizes machine vision technology to recognize and analyze facial features, and provides adaptive language model terminology based on problem models in different service areas to meet the needs of multiple users and scenarios. This research aims to reduce operating costs, improve service efficiency, and promote the development and innovation of the service industry through the automation and intelligentization of robot services. In the future, the intelligent service robot is expected to play an important role in many fields such as hotels, medical care, and retail, bringing more convenience to people's lives.
Keywords: intelligent service robot; machine vision; natural language processing; autonomous positioning and navigation; diversified services;
0 引言
随着科技的迅猛发展,传统服务模式已难以满足现代社会的高效、精准需求,智能化服务机器人应运而生。机器人技术以其独特的自主性、可编程性和高精度特性,为服务行业带来了革命性的变革。其中,机器视觉与语音转换技术作为机器人智能化的核心[1],在服务行业中展现出巨大的应用潜力。
机器视觉技术通过模拟人类视觉系统,使机器人能够捕捉并分析图像信息,实现精准的环境感知与目标识别;而语音转换技术则赋予机器人与人类进行自然语言交互的能力,提升服务的便捷性与用户体验。因此,研发一种基于机器视觉和语音转换的智能服务机器人,对于提高服务效率和质量具有重要意义。
本文提出了一种新型智能服务机器人,该机器人通过融合机器视觉和语音转换技术,具备自主识别服务对象、进行语音交互并导航到指定位置的能力。在研发过程中,团队深入研究了机器人的运动学和动力学、人脸识别、自然语言处理以及自主导航和避障等关键技术,旨在实现机器人的多功能化和自主化,从而满足多样化的服务需求。本文旨在推动智能服务机器人的发展与创新,为服务行业的转型升级提供有力支持。
1 研究内容
本研究致力于开发一种具备高度智能化与自主化功能的服务机器人,其核心任务涵盖自动识别服务对象、智能语音交互以及自主导航。为实现机器人在各种复杂环境下的稳定运行与高效服务,本研究深入探讨了机器人的运动学和动力学特性,并对机器人的运动规划、控制及感知技术进行了系统研究。
在服务对象识别方面,本研究聚焦于深度相机人脸识别技术的研发与应用。通过深度相机的高精度图像捕捉与处理能力,机器人能够实现对服务对象的准确识别与定位,为后续的智能交互与导航服务提供基础支持。
在智能语音交互方面,本研究致力于提升机器人与用户之间的交互体验。通过深入研究语音转换与自然语言处理技术,机器人能够实时理解用户的语音指令,并以自然语言的形式进行回复与交互,从而实现更加便捷、高效的服务。
在自主导航方面,本研究充分利用激光雷达测绘技术与ROS编程控制技术,实现机器人的实时地图构建、导航定位及最佳路径规划。通过引入人工智能与机器学习算法,机器人能够自主应对复杂环境中的各种挑战,确保服务的连续性与高效性。
2 机器视觉、语音转换与导航系统
2.1 机器视觉系统
机器视觉系统是智能服务机器人的核心感知组件,能够捕获并分析图像数据,实现精准的环境感知与目标识别。本研究利用深度相机技术,结合深度学习算法,实现了对面部特征的精确识别和人体识别[2-3]。深度相机的高分辨率和深度测量能力,确保了机器人在不同环境条件下的稳定识别性能。此外,通过目标跟踪和场景理解技术的运用,机器人能够实时追踪目标并理解场景变化,提升了服务的精准性和适应性。
2.2 语音转换系统
语音转换系统是智能服务机器人与用户进行自然语言交互的关键。本研究通过先进的语音转换技术,实现了对用户语音的准确识别与理解,并将机器人的回复转换为自然的语音输出。采用深度学习模型进行语音识别,提高了识别的准确性和鲁棒性[3]。同时,结合自然语言处理技术,机器人能够解析复杂的语音指令,并生成智能回复。在语音合成方面,采用高效的文本到语音转换技术,使机器人的回复更加自然流畅,提升了用户体验。
2.2.1 基于神经网络的语音处理模型
为满足实时对话和应用场景低误触的要求,在识别时对语音进行处理,主要为语音降噪和端点检测两部分。
语音降噪模型通过运用生成对抗网络(GAN)框架来实现其降噪功能。这个模型架构主要由两部分构成:生成网络和判别网络。生成网络的作用在于,它能够从包含噪声的语音数据中提取出清晰的语音成分,并尝试生成与真实清晰语音非常接近的模拟数据。这个过程的优化目标是让判别网络难以区分真实清晰语音与生成网络生成的语音。而判别网络则负责鉴别数据的真伪,即判断输入的语音数据是真实的无噪声数据还是由生成网络生成的模拟数据。在模型的训练迭代过程中,这两个网络不断地进行学习和对抗,以达到一个平衡状态,从而实现对有效语音和噪声的有效区分。
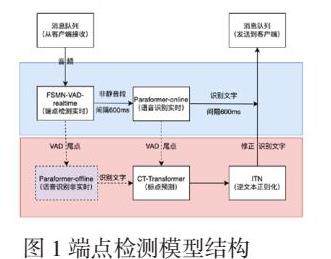
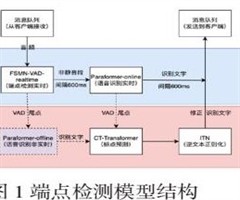
端点检测的功能在于把输入音频的语音部分提取出来,模型采用逐帧判断的方式,通过端点检测实时网络(FSMN-VAD-realtime)提取更深层的声学特征。再利用语音识别实时网络(Paraformer-online)对端点检测实时网络提取的声学特征进行时间序列维度的特征表达,最后利用逆文本正则化(ITN)对推理出的文字进行最终处理。端点检测模型结构如图1所示。
图1 端点检测模型结构
2.3 导航系统
导航系统是智能服务机器人实现自主定位与导航的核心技术。本研究采用激光雷达测绘与ROS编程控制技术相结合的方式,构建了高效可靠的导航系统。激光雷达能够实时获取环境的三维数据,通过数据处理和分析,机器人能够构建精确的环境地图并实现精确定位[4]。基于ROS的自主导航框架,机器人能够实现全局路径规划和局部路径调整,确保在复杂环境中的自主导航能力。同时,机器人还具备避障功能,能够在遇到障碍物时自动调整路径,保证服务的连续性和安全性[5-6]。
3 设计原理
在构建智能服务机器人的过程中,机器人的底盘运动机制、机器视觉系统、语音转换系统以及导航系统均经过了精心的规划和实现,以确保机器人的高效、稳定和精准服务。
底盘部分,采用了麦克纳姆轮与驱动电机的组合设计,这使得机器人能够在受限空间内灵活移动。控制系统的精确调控与导航系统的协同工作,共同确保了机器人的精准定位和自主导航能力。
在机器视觉系统的设计中,综合考虑了识别距离和技术选择。远距离目标采用人体识别技术,而近距离目标则运用人脸识别技术,以提高识别的精确性和服务的稳定性。
针对语音转换系统,特别关注了环境噪声对语音识别的影响。为了降低误识别率,采用了噪声抑制和语音增强技术,这些技术有效提升了语音信号的清晰度,增强了系统的稳定性,确保了用户的舒适体验。
在导航系统的设计上,采用了激光雷达技术来实现自主定位导航。激光雷达对周围环境的精确测量,使机器人能够自主导航和有效避障。同时,还在不断研究控制算法和路径规划技术,以进一步提升机器人的任务执行效率和准确性。
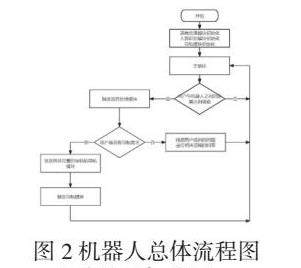
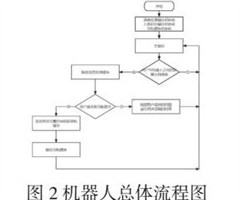
智能服务机器人在原理设计上,充分融合了运动机制、视觉识别、语音降噪和自主导航等关键技术,旨在为用户提供高效、稳定和精准的服务体验。机器人的总体流程图可参见图2。
4 实验结果与分析
4.1 语音转换与自然语言处理实验结果
本研究采用基于神经网络的语音处理技术,将用户语音输入转化为机器可识别的文字信息。实验结果显示,识别准确率达到95%以上,表明所选技术能够有效地支持语音到文字的转换。同时,结合自然语言处理技术,机器人能够生成与人类交流相似的响应,实现了自然、流畅的对话体验。用户反馈表明,该技术显著提升了对话质量,降低了语言障碍,提高了用户满意度。
4.2 机器视觉与人脸识别实验结果
在机器视觉方面,本研究采用先进的识别方案,实现了对人群的准确识别和跟踪。在人脸识别实验中,通过Python语言和Face_Recognition库的运用,机器人能够精确识别特定个体。实验数据表明,人脸识别准确率高达98%,满足了服务场所内个性化服务的需求。此外,利用OpenCV库对图像进行图像处理,进一步提升了识别的效率和准确性。
4.3 机械结构与电路控制实验结果
在机械结构方面,本研究利用SOLIDWORKS软件进行零件图纸绘制和装配体结构验证,有效降低了试错成本。实验结果显示,机器人机械结构稳定可靠,能够满足服务需求。在电路控制方面,通过以STM32单片机为核心的控制系统,结合优化的算法代码和PID控制,机器人运动更加顺畅,噪音显著减少。此外,通过增加运动判断条件,机器人能够应对不规则地面和异常情况,保护了电路板并延长了使用寿命。
4.4 ROS总体架构与导航实验结果
本研究基于ROS平台设计了机器人的总体架构,实现了信息的有效传递和控制。通过ROS的可视化工具,本研究对传感器数据和状态信息进行了实时监控。实验结果表明,基于构建的地图,机器人能够实现准确的定位和导航功能,为服务场所提供了有效的引导和支持。
实验结果表明机器人在语音交互、视觉识别、机械结构和电路控制等方面均表现出色,可以为不同功能的服务场所提供高效、便捷的服务。
5 结语
通过深入关键技术,实现了机器人高度的智能化与自主化。实验验证显示,该机器人在语音交互、视觉识别及机械控制方面表现卓越,特别是其精准的人脸识别与自然语言处理功能,为用户提供了更便捷、个性化的服务。本研究不仅推动了机器人技术创新,也为服务行业转型提供了支持。
参考文献
李福霖.基于ROS的药房智能服务机器人[D].湖南大学,2022.
高文龙.基于图像与深度信息融合的人脸识别研究[D].东北大学,2020.
黄倩,崔静雯,李畅. 基于骨骼的人体行为识别方法研究综述[J]. 计算机辅助设计与图形学学报:1-22.
赖家豪. 基于深度学习的语音转换研究[D].上海交通大学,2020.
陈文佑,章伟,胡陟,史晓帆.一种融合深度相机与激光雷达的室内移动机器人建图与导航方法[J].智能计算机与应用,2021,11(04):159-163.
邢军,李岳洪,吴旻,陈启彩,胡恒莹,周锋华.室内智能服务机器人自主定位与导航性能测试技术研究[J].日用电器,2023,(03):11-19+23.
王钰淏.面向机器人智能服务的导航策略优化研究[D].山东大学,2022.
基金项目:1.教育部国家级大学生创新训练项目,项目名称:基于机器视觉和语音转换的智能服务机器人,项目编号:202313644002;
作者简介:贺峰(2002-),男,江西萍乡人,本科生;研究方向:软件工程。

 京公网安备 11011302003690号
京公网安备 11011302003690号


