



- 收藏
- 加入书签

基于PID控制的油气管道压力自动调节系统设计与实现
 打开文本图片集
打开文本图片集
摘要:对设计并实现基于PID控制的油气管道压力自动调节系统进行研究,通过详细分析PID控制的基本原理及其在油气管道中的应用,构建了系统的总体架构,并对硬件的选型与设计进行了完成。在此基础上,重点对控制算法进行优化以适应实际工况的需求,并对控制系统软件进行开发。在实验装置上对其压力调节性能进行了验证,结果证明系统在压力调节方面具有良好的稳定性与响应速度,对油气管道的运行效率与安全性有了明显的改善。本研究成果为油气管道自动化控制系统的设计与实施提供了重要的借鉴和参考作用。以利于保障油气管道的运行安全。以利于实现油气管道的高效运行。
关键词:PID控制;油气管道;压力调节;自动化控制系统;系统设计
引言
随着油气资源被广泛开采和利用,油气管道运输在经济上起着举足轻重的作用。但复杂的工况加上多变的外部环境,使管道压力控制面临严峻挑战,而传统的手动调节方式已不能适应现代生产的要求了。本文提出了一种基于PID控制的油气管道压力自动调节系统,它通过科学的控制算法和优化的硬件设计,实现对管道压力的精确控制,从而保证油气输送的平稳性和安全性,在理论和实践上具有可借鉴价值。
1.PID 控制原理与应用
1.1PID控制的基本原理
PID控制,即比例-积分-微分控制,在工业自动化控制系统中得到广泛应用,是一种经典的反馈控制算法。PID控制器根据比例(P)、积分(I)、微分(D)三种调节作用,通过获取系统输出与目标值的偏差来控制系统。通过线性关系对系统输出进行比例控制的调节,但在稳态方面容易出现误差。积分控制则消除稳态误差,使系统的输出逐渐向目标值靠拢,但超调和振荡可能会被引入。
1.2PID控制器的调节参数
PID控制器的调节参数包括比例增益(Kp)、积分时间常数(Ti)和微分时间常数(Td)。比例增益Kp决定了控制器对偏差的直接反应程度,较大的Kp可以加快系统响应速度,但可能导致系统不稳定;积分时间常数Ti决定了积分作用的强度,较短的Ti可以更快消除稳态误差,但可能引发系统振荡;微分时间常数Td决定了微分作用的强度,较长的Td可以有效减小系统的振荡和过冲,但过大则可能引入噪声影响。PID控制器的参数整定是控制系统设计中的重要环节,常用的方法包括经验整定法、Ziegler-Nichols法和临界比例法等。
1.3PID控制在油气管道中的应用
应用PID控制器进行油气管道压力控制的优点是明显的,这是因为它与传统的控制法相比能够迅速反应压力波动并进行可靠的压力保持。由于油气管道系统具有大惯性和大时滞的特点。所以传统的控制法很难对压力变化进行快速响应。但是PID控制器不同了它可以做到实时调整来保持压力的稳定性和可靠性。而且由于它不受大惯性和大时滞的限制。所以在油气管道的长距离输送过程中是完全可以发挥作用的。
2.油气管道压力自动调节系统设计
2.1系统需求分析
油气管道压力自动调节系统的设计需要充分考虑管道运行的实际需求,包括压力控制的精度要求、系统的响应速度、运行的稳定性以及故障处理能力等。在本研究中,针对某一实际应用场景,系统设计的压力控制精度要求为±0.1MPa,系统响应时间要求小于1秒,并且能够在环境温度-20℃至50℃范围内稳定运行。系统还需具备一定的自诊断和故障处理能力,以应对突发状况,确保系统的安全性和可靠性。
2.2系统架构与硬件设计
在硬件方面,该系统由压力传感器、PID控制器、执行机构和通讯模块构成。压力传感器负责对管道内压力变化进行实时监测,并向PID控制器传输数据。PID控制器根据预设的控制算法,通过执行器对管道阀门开度进行调整,计算出相应的控制指令,从而精确控制压力。通信模块用于系统内部各部分之间的数据传输,并可与上位机进行通信,实现远程监控和控制,系统内部各部件之间可以通过通信方式实现数据硬件选型时,为保证系统测量精度达到设计要求,选用了高精度压力传感器;执行器为满足系统对反应速度的要求,选用了反应迅速的电动阀门。
2.3控制算法的实现与优化
控制算法是系统设计的核心,直接决定着系统的调节性能。为此,在本系统的设计过程中,通过采用改进后的PID控制算法,使系统对工况变化的适应能力得到了进一步的增强,从而有效地提高了系统的调节性能。具体地说,通过引入模糊控制和神经网络等一系列智能算法,实现对PID控制器参数的实时在线调节,使系统在不同的运行环境下自动优化控制效果。另外,针对油气管道系统的大惯性和大时滞特点,还设计了前馈控制和滞后补偿策略,使系统的响应时间和稳态误差得到了有效的减小。在算法优化过程中,将结合实验资料对系统进行仿真分析,并对控制参数和算法结构进行调整,保证系统在实际运行中的高效性和可靠性,从而有效地满足系统的各种需求。
3.系统实现与实验验证
3.1 控制系统的软件开发
系统软件开发包括编程实现控制算法,设计数据处理模块,开发人机界面等。PID控制算法在嵌入式系统中的高效运行是通过使用C语言进行底层开发实现的。同时开发了可以过滤传感器数据、解码数据并将处理后的数据传输到控制算法模块的数据采集与处理模块,以方便数据的实时处理与分析。
3.2实验装置与测试方案
为了验证系统的实际性能,搭建了一个油气管道压力控制实验平台。实验装置包括模拟油气管道、压力传感器、PID控制器和电动阀门等组件,系统与实际管道环境尽可能保持一致。测试方案包括系统响应时间、压力调节精度、系统稳定性以及抗干扰能力等多项性能指标的测试。
3.3实验结果与分析
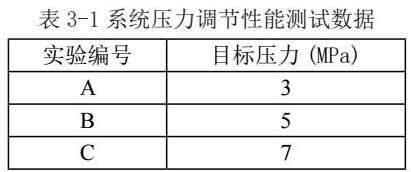
实验结果表明,基于PID控制的油气管道压力自动调节系统在实际应用中具有良好的性能。通过多次实验数据的分析,可以看到系统在压力调节的稳定性和响应速度上均达到了设计要求。以下为实验中的主要数据结果汇总:
实验结果显示,该系统的调压精度控制在±0.02MPa的范围内,所有应答时间都在1秒之内,而且还控制了不到1%的超调量,显示了该系统的控制精度和应答速度都很高。
4.结论
该研究针对传统控制方式在复杂工况下的不足,设计并实现了基于PID控制的油气管道压力自动调节系统。经系统架构设计、控制算法优化和实验验证,该系统有效增强了油气管道运行稳定性和安全性,在调节压力的精确性和响应速度方面具有显著优势。
参考文献
[1]陈大雷.管道牵引机器人研究[D].中国石油大学(北京),2022.
[2]夏文凤.油气管道机器人自适应运动控制的研究[D].武汉工程大学,2022.
[3]李一鸣.面向高原油气管道巡检的可重构飞行阵列设计、建模与构型分析[D].昆明理工大学,2022.

 京公网安备 11011302003690号
京公网安备 11011302003690号


