



- 收藏
- 加入书签

基于STM32单片机技术在智能乒乓球捡球机器人中的设计与实现
 打开文本图片集
打开文本图片集
摘要:本文介绍了一种使用OpenMV摄像头采集和处理图像与卷积神经网络yolov9的新型智能捡球机器人,该设计以自动化作为控制核心,集成了硬件系统、图像处理系统、控制系统、避障系统、电源系统、显示及遥控系统,通过自动化和智能化的技术手段,实现乒乓球的快速、准确收集和整理,减少人工操作的繁琐和时间成本。该智能捡球机器人与传统的人工捡球不同,智能捡球机器人提高了效率与准确性,提高用户体验,更在一定程度上推动机器人技术以及相关传感器和算法的发展,为机器人技术在更多领域的应用奠定基础。根据乒乓球的特性和收集整理的需求,设计并制造出适用于乒乓球收集和整理的机器人。这包括确定机器人的结构、材料、运动方式等,以确保其能够稳定、高效地工作。机器视觉与物体识别技术研究了如何通过机器视觉技术实现对乒乓球的准确识别和定位。深度摄像头涉及到图像处理、模式识别等算法的研究和应用,用于识别物品的种类,返回坐标与3D成像建模以便机器人能够在复杂的场景中准确地识别和找到乒乓球。
关键词:传感器;运动控制;机器视觉;智能捡球机器人
1.新型自主捡球机器人智能小车的研究背景:
1.1 国内外研究现状
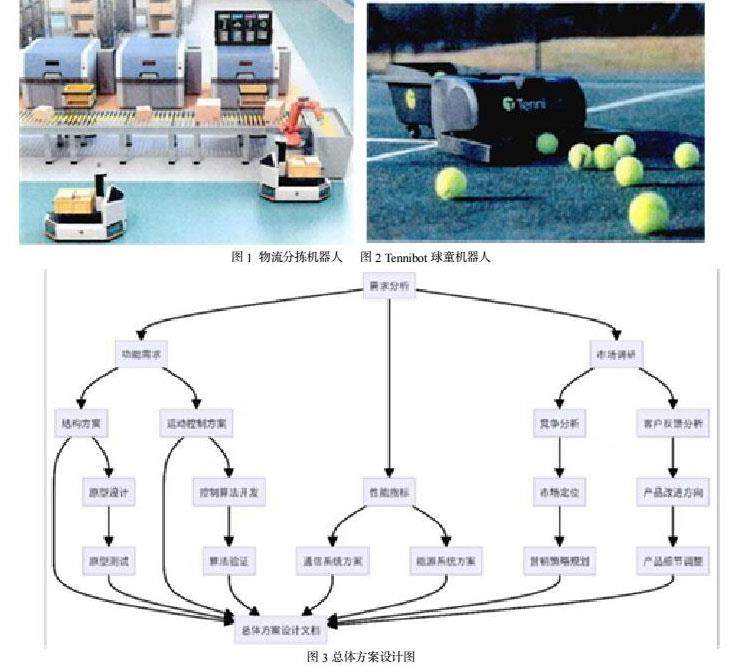
目前针对小球类物体捡拾机器人的研究成果比较少,国外研究的单位有西班牙UniversityofMinho、美国MIT、英国UniversityofBradford和荷兰VrijeUniversity等,国外的捡球机器人研宄主要侧重于机械设计和智能控制。研宄人员利用机械设计和深度学习、模糊控制技术来提高机器人的捡球性能,以实现更自动化的捡球任务。然而,Tennibot球童机器人和The Ball Pickey球童机器人所使用的深度学习和模糊控制算法需要大量的计算和高端的芯片和外部器件才能实现算法的优异性能。因此,设计款捡球机器人的成本也随之大幅提高,导致该类球童机器人并没有在全球范围内广泛应用[1]。国内研究单位主要有上海交通大学、东南大学、北京邮电大学、北京理工大学等,研制的机器人主要有高尔夫球、网球、乒乓球和羽毛球等捡拾机器人,按照捡拾工作原理不同可分为机械手式、组合式、清扫式、气吸式、辊轮式、滚筒式和弹簧式等捡拾机器人,如图1、图2所示:
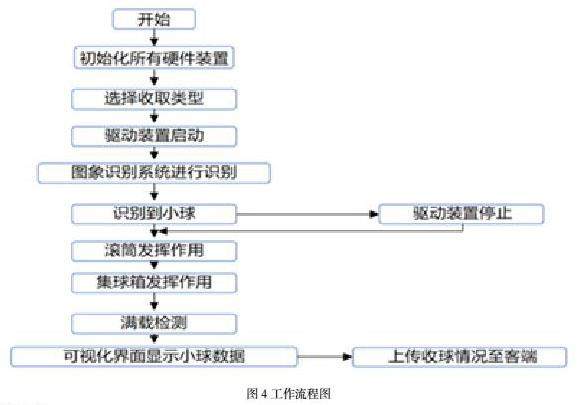
如图3所示,通过对搜集到的数据进行分析对比,最后提出自主捡球机器人智能小车的概念,在社会群体中普及这款智能小车,并激励公众主动使用这款小车,发挥公众的能动作用,同时提高企业的经济利益。人工智能应用于文体领域的相关研究刚刚兴起,前人对于捡球机器人的研究工作相对较少。国内对于捡乒乓球机器人的研究还在起步阶段,没有成熟的系统成果,目前的研究主要集中于机器人的机械结构设计和乒乓球的检测识别等几个方面。在捡球机器人这一大类中,国内对于捡网球机器人的研究较多,方向大多集中在机械臂的设计机器视觉和路径规划几个方面,研究内容更多的是球和障碍物的识别分类、路径的选择以及运动控制等[2],工作流程图如图4所示。
1.2 系统实现原理
根据需要对各个模块进行初始化和编程。本系统在设计硬件部分时预留出了多个模块通信接口,可以灵活地配置与主控板的组合方式,以达到用不同的模块来适应不同场景的目的。增设各种模块与传感器,和控制板相互搭配,可以应用于多种场景。
1.2.1 决策层部分(上机位)
(1)控制雷达:雷达具有跟随功能,主要利用激光雷达 360°实时扫描周围环境,寻找周围可检测的最近的物体,并对其进行跟随。
(2)摄像头:乐视体感摄像头 LeTMC-520摄像头的各个功能模组,包括两个MIC麦克风,一个红外投影模组,一个面部接近感知模组,一个RGB相机模组,以及一个IR相机模组。分别实现体感,手势,视频聊天的功能[3]。
(3)语音模块:M260C环形六麦是一种高性能的麦克风,它采用了环形设计,由六个麦克风单元组成,能实现360度的全方位拾音。这种设计特别适合于需要广泛采集声源的场合,如会议、录音和直播等。它具有高清晰度、低噪声、宽频带等特点,能够有效捕捉环境中的声音,即使在嘈杂的环境中也能提供高质量的音频输出。
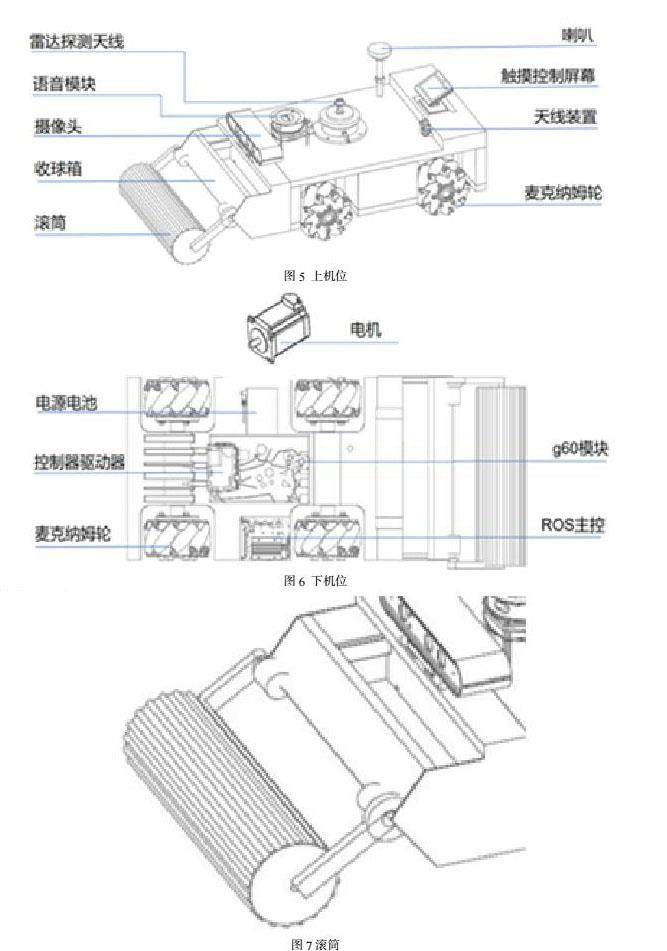
(4)GNNS模块:GNSS模块通常包含天线、接收器、处理器和存储器。天线用于接收卫星信号,接收器将信号转换为数字信号,处理器计算位置和速度信息,存储器用于存储相关数据和程序[4]。上机位构造如图5所示:
1.2.2 底层执行部分(下机位)
(1)控制器驱动器:控制器负责接收控制命令,产生控制信号, 以及外发底盘运动状态数据。驱动器负责放大控制信号以驱动电机。可以驱控一体设计。
(2)运动底盘:以上四个部分安装到车架上即可组成一个运动底盘。
(3)电机:电能转化为动能的装置。
(4)轮子:连接电机,根据应用需求选择不同的轮子。
(5)电池电源:提供能源。下机位构造如图6所示:
1.2.3机械设计部分
滚筒:滚筒由数根橡皮筋、两块圆形亚克力板、支撑轴、两个轴承组成,如图①所示。以圆形亚克力板为滚筒的两端,支撑轴贯穿并固定两片亚克力板,橡皮筋横穿两块亚克力板,橡皮筋与橡皮筋的间距略小于乒乓球直径。根据国家标准,乒乓球直径为40mm,则橡皮筋间距可采用30mm。当滚筒向前滚动,并从乒乓球上压过时,乒乓球会使得皮筋发生形变,由于皮筋的弹性的作用,乒乓球会压入滚筒,而乒乓球在滚筒内部没有足够的外力作用,即乒乓球不会从滚筒中弹出[5]。如图7所示:
1.3 研究意义
(1)从技术创新与应用的角度来看,这项研究有助于推动机器人技术和人工智能技术的深入发展。机器人自动收集和整理乒乓球涉及到机器视觉、物体识别、运动控制、路径规划等多个技术领域,这些技术的研究和应用不仅有助于提升机器人的智能化水平,还能够推动相关技术的进步和创新。
(2)从效率和成本优化的角度来看,机器人自动收集和整理乒乓球能够大幅提高乒乓球比赛和训练的效率。在传统的乒乓球比赛和训练中,需要人工收集和整理乒乓球,这不仅耗时耗力,还可能影响比赛和训练的进度。而机器人能够自动完成这些任务,节省了大量的人力成本,提高了工作效率。
(3)从安全性和准确性的角度来看,机器人自动收集和整理乒乓球也具有显著优势。机器人可以通过精确的传感器和算法,实现对乒乓球的精准识别和定位,避免在收集和整理过程中造成乒乓球的损坏或丢失。同时,机器人不受疲劳、情绪等因素的影响,可以始终保持高度的工作准确性和稳定性。
(4)从行业发展和社会影响的角度来看,研究机器人自动收集和整理乒乓球还有助于推动相关产业的升级和发展。随着乒乓球运动的普及和发展,对于高效、智能的乒乓球收集和整理系统的需求也在不断增加。这项研究的成果不仅可以应用于乒乓球领域,还可以为其他体育领域提供有益的借鉴和参考,推动整个体育产业的智能化升级[6]。
1.4项目创新特色概述
视角创新:住房和城乡建设部办公厅体育总局办公厅关于开展“国球进社区”“国球进公园”活动进一步推动群众身边健身设施建设的通知,为全面贯彻落实党的二十大精神,坚持人民城市人民建、人民城市为人民,进一步推动群众身边健身设施建设,丰富群众健身活动空间,满足市民多样化健身活动需求,住房和城乡建设部、体育总局决定组织开展“国球进社区”“国球进公园”活动,可在此视角下进行分析成为此次研究视角的创新[7]。
技术路线创新:本项目将人工智能与机器学习相结合,物联网,大数据技术的分析与利用。相对于其他研究,本项目在现有的研究方法上具有新的提出,比如,运用卷积神经网络(CNN)、生成对抗网络(GAN)、深度信念网络(DBN)和Transformer等算法对研究项目来说提出的对策建议较为全面。
产品创新:资料表明,目前国内该类型项目研究较少,本项目研究旨在改变传统运营挂管理模式,探索新型运营管理模式,改善乒乓球捡拾困难、耗时问题现状;研究成果对全国乒乓球训练场所及推广国球运动具有较高的实用价值。
参考文献:
[1]张建峰.智能捡球机器人的设计与研究[D].宁夏大学,2023..
[2]周海波,张忠党,刘振忠,等.捡拾机器人机械手运动学分析与仿真[J].机床与液压,2018,46(23):23-28+34.
[3]鲍鹤,刘俊,杨明.一种集装箱监测设备设计[J].中国科技信息,2023,(20):100-102.

 京公网安备 11011302003690号
京公网安备 11011302003690号


