



- 收藏
- 加入书签

基于视频数据的车辆变线行驶警示辅助系统建模与仿真
 打开文本图片集
打开文本图片集
2022年度大学生创新创业训练计划项目:基于视频数据的车辆变线行驶警示辅助系统建模与仿真(202211802199)
摘要:如何为驾驶员提供一个有效实用的安全驾驶辅助系统,是车辆安全驾驶的一个重要课题。车道偏离预警系统(Lane Departure Warning Systems,简称LDWS)将是最有效的解决工具。目前LDWS在国内外已经引起了广泛的关注并且开展了广泛的研究。
本文通过摄像头采集道路车道线视频图像,来确定车辆行驶在车道中的状态,系统检测到驾驶员未发出的变线意图,但车身马上或已经超越两侧车道线时,系统便会判定车辆已偏离车道,并发出警告。并会对行驶辅助系统做了进一步的探讨,系统将以MC9S12DG128作为控制单元,转向机构通过CCD摄像头采集的道路信息进行PID反馈控制,速度电机的转速采用级联双通道的PWM控制。并进行了相应的模拟道路实验,取得了良好的道路感知效果。该论文的研究对于车辆变线行驶警示辅助系统研究提供了一条可行的研究途径。
关键词:变线;警示;视频;PID控制;PWM控制
1.引言
道路偏离系统可以大大减轻驾驶人员的驾驶工作,提高交通系统的安全性。沃尔沃汽车研究人员估计,在车速70~100km/h之间时,车道偏离警示系统可以使这类事故减少30~40%。为了进一步提高机动车在行驶中的安全性,欧盟委员会规定:从2013年起所有新出厂的货车和其他重型汽车必须安装车道偏离预警系统(Lane Departure Warning Systems,简称LDWS)。专家认为,欧盟境内的车辆安装了LDWS系统后,每年可避免1000人死于交通事。各国汽车市场上配有电子稳定系统的汽车越来越多,紧急制动预警系统和车道偏离预警系统也相继加入整车制造之中[1]。可见车辆变线行驶警示辅助系统的研究具有潜在的经济价值和广泛的应用前景
2. 研究发展现状
如何为驾驶员提供一个有效实用的安全驾驶辅助系统,是车辆安全驾驶的一个重要课题。DAS(DriverAssistanceSystem)车载安全驾驶辅助系统将是最有效的解决工具。目前,车载安全驾驶辅助系统在国外已经开展了广泛的研究。在欧洲,早在1987年奔驰公司和德国国防军大学联合研制 VAMORS 系列自动驾驶汽车就已创下了道路标志线跟踪的最高时速97km/h。在随后几年不断创造新的时速记录并且具备了超车换道功能和对多种气象条件的适应能力,其核心是运行于 BVV上的视觉导航系统。研制的 VAMORS-P系统也已在高速公路和普通标准公路上进行了大量实验,实验内容包括跟踪车道线,躲避障碍,以及自动超车等。利用自适应控制进行纵向及横向自主方式行为实验,该系统1995年公布的最高时速可达130km/ h。
法国帕斯卡大学自动化与电子材料科学实验室与法国D.R.A.S雪铁龙Citroen技术中心合作研制 Peugeot系统,其视觉系统使用单摄像机实时检测并跟踪路白线,采用高斯滤波和平均值计算确定灰度标准方差,利用梯度计算确定车道线的右 (或左)边缘,同时选择多项式函数建立轨迹模型,利用时空光滑方法降低噪声和提高鲁棒性。当车体前方或驾驶参数出现非正常状况时,系统以语音信号的方式向驾驶员发出警告性提示,以避免或降低因驾驶员疏忽所引发的行车事故,提高车辆在道路行驶中的安全性,可见该系统完成的是相对简单的安全警告与辅助导航功能[2]。
图像处理和道路识别策略:采用视觉窗口技术,仅处理感兴趣区域的局部信息,RALPH 系统选取一个随车速变化的梯形窗口,该梯形窗口中每一行对应的实际水平宽度约7m 左右,大约为典型车道宽度的两倍,然后对梯形窗的内容进行几何变换,建立一个30×32像素的低分辨率图像,满足实时性要求道路检测使用道路平坦假设和平行于道路的特征如车道线、道路边界等识别道路。Navlab-5 自主驾驶的平均速度为 88. 5km / h,还首次进行了横穿美国大陆的途自主驾驶实验,距离长达4586km。统计结果表明,自主驾驶的行程 4496km竟占总行程的98.1%。在1997年研制了 Navlab-8,小型商务车,能够进行方向速度控制,依然是 RALPH视觉系统。在日本,也成立类似专门机构,每展示试验车辆取得的新成就,并在高级安全车辆上安装了这些成果,提供车道跑警告,车距保持及障碍检测功能[3]。
日本在货运车辆上安装了驾驶员疲劳状况监测装置,使在凌晨发生的交通事故率明显下降。另外,在日本和欧洲的货运车辆中,戴姆勒-克莱斯勒公司从2000年前就为他们的货车安装了视频技术的车道识别系统,并成功的销售了7000辆采用这种LDW(LaneDepartureWarning)车道识别系统的货车。而日本的本田公司在他们的Inspire、Accord、Legend车型中配备了LDW车道识别系统[4]。
3.设计的主要内容
1、道路信息检测电路的设计
摄像头输出的是标准的视频复合信号,利用同步信号分离芯片LM1881和S12单片机的A/D转换器可以对道路视频信号进行采集,从而得到图像数据,经二值化处理就可以得到车道线轨迹在图像上的点阵。
2、警示模块电路的设计
包括LED、震动电机、蜂鸣器等报警器还包括对行驶道路的检测和修正。
3、无线遥控模块电路的设计
实现车辆的前进、后退、左转、右转和在开启左、右转向灯时关闭警示系统。
4、电源电路的设计
单片机最小系统的工作电压是5V,摄像头的工作电压是9V,而电池电压是7.2V。为保证单片机和传感器工作稳定可靠电源电路的设计十分重要。
4.车辆变线行驶中道路信息的特点
针对的道路是结构化道路,一般指高速公路和部分结构化较好的公路,它们具有清晰的车道线和道路边界,车道线一般是连续的白(黄)线或短划线,在这种情况下,道路检测问题可以简化为车道线或道路边界的检测问题。
经过对车辆在实际驾驶中,所拍摄到的路面状况分析,发现在摄像头视野主要是车辆所在当前车道的道路标识线,而其他车道的标志线较远,并且在图像底部只存在当前车道线的白色标识线(如图 2.1)这就简化了我们的搜索方法,在图像底部开始搜索,满足我们要求的线段点就是道路标识线。
5.变线警示系统中道路信息采集方案的确定
道路图像采集的方案有两种:第一种是采用一个摄像头,第二种是采用两个摄像头。采用一个摄像头的优点是安装容易,单片机处理的数据量小,视频信号的处理的电路也比较的简单。能采用一个摄像头固然非常好,但由于受摄像头所能采集到得道路图像信息的范围的限制,采用一个摄像头并不能将前方道路信息完全采集到具有盲点,会有检测不到车道线的情况。这样对道路情况的描述产生很大的影响,对车辆的控制和警示产生偏差。故此方案舍弃,采用第二种方案。摄像头的安装及采集到得道路图像。
6.车辆警示辅助模块的电路设计
警示系统的作用是在未检测到驾驶员发出的转变意图 (如拨打方向灯) ,但车身马上或已经超越两侧标线时,系统便会判定车辆已偏离车道,并发出声响警告。警示的形式包括声、光、振动等动作。警示系统的执行元件包括LED、蜂鸣器、振动电机,晶体管在其中是控制部件,整个电路通过单片机的PP7口驱动。当摄像头采集到的道路信息显示车辆将要或已经偏离了车道线,给于警示系统控制信号,相应的执行器开始工作。
7试验车转向控制模块的设计
7.1转向控制方式的实现
1、PID控制原理
(1)比例(P)控制
比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差。
(2)积分(I)控制
在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
(3)微分(D)控制
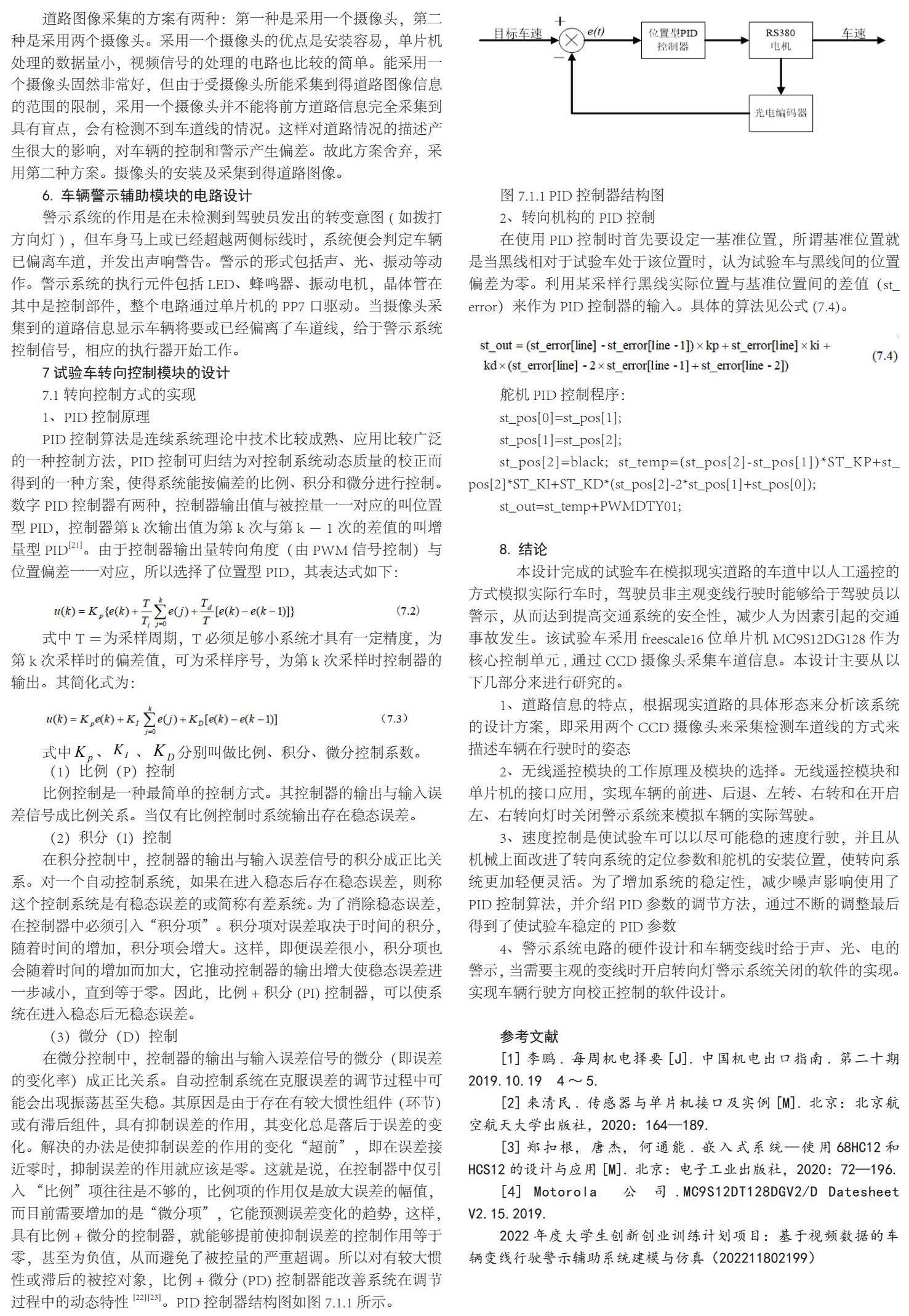
在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入 “比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性[22][23]。PID控制器结构图如图7.1.1所示。
2、转向机构的PID控制
在使用PID控制时首先要设定一基准位置,所谓基准位置就是当黑线相对于试验车处于该位置时,认为试验车与黑线间的位置偏差为零。利用某采样行黑线实际位置与基准位置间的差值(st_error)来作为PID控制器的输入。具体的算法见公式(7.4)。
舵机PID控制程序:
st_pos[0]=st_pos[1];
st_pos[1]=st_pos[2];
st_pos[2]=black; st_temp=(st_pos[2]-st_pos[1])*ST_KP+st_pos[2]*ST_KI+ST_KD*(st_pos[2]-2*st_pos[1]+st_pos[0]);
st_out=st_temp+PWMDTY01;
8.结论
本设计完成的试验车在模拟现实道路的车道中以人工遥控的方式模拟实际行车时,驾驶员非主观变线行驶时能够给于驾驶员以警示,从而达到提高交通系统的安全性,减少人为因素引起的交通事故发生。该试验车采用freescale16位单片机MC9S12DG128作为核心控制单元, 通过CCD摄像头采集车道信息。本设计主要从以下几部分来进行研究的。
1、道路信息的特点,根据现实道路的具体形态来分析该系统的设计方案,即采用两个CCD摄像头来采集检测车道线的方式来描述车辆在行驶时的姿态
2、无线遥控模块的工作原理及模块的选择。无线遥控模块和单片机的接口应用,实现车辆的前进、后退、左转、右转和在开启左、右转向灯时关闭警示系统来模拟车辆的实际驾驶。
3、速度控制是使试验车可以以尽可能稳的速度行驶,并且从机械上面改进了转向系统的定位参数和舵机的安装位置,使转向系统更加轻便灵活。为了增加系统的稳定性,减少噪声影响使用了PID控制算法,并介绍PID参数的调节方法,通过不断的调整最后得到了使试验车稳定的PID参数
4、警示系统电路的硬件设计和车辆变线时给于声、光、电的警示,当需要主观的变线时开启转向灯警示系统关闭的软件的实现。实现车辆行驶方向校正控制的软件设计。
参考文献
[1]李鹏.每周机电择要[J].中国机电出口指南.第二十期 2019.10.19 4~5.
[2]来清民.传感器与单片机接口及实例[M].北京:北京航空航天大学出版社,2020:164—189.
[3]郑扣根,唐杰,何通能.嵌入式系统—使用68HC12和HCS12的设计与应用[M].北京:电子工业出版社,2020:72—196.
[4] Motorola 公司.MC9S12DT128DGV2/D Datesheet V2.15.2019.

 京公网安备 11011302003690号
京公网安备 11011302003690号


