



- 收藏
- 加入书签

四旋翼飞行器系统设计
 打开文本图片集
打开文本图片集
摘要: 四旋翼无人飞行器是一种能够垂直起降、以四个旋翼作为动力装置的,不载操作人员的飞行器。通过改变4个电机的转速来调节螺旋桨转速,由旋翼升力的变化实现对飞行器的控制,实现垂直起降(VTOL)、自主悬停、俯仰、横滚、偏航等动作。本文从四旋翼飞行器飞控系统具体要求及难点出发,结合5G通信技术及人工智能,完成飞行器结构、硬件、软件、姿态等设计思路、工程实践及应用发展。
关键词:四旋翼飞行器;系统;设计
一、无人机研究现状(多轴)
目前,微型四旋翼飞行器可大致分为三类:遥控航模四旋翼飞行器、微小型四旋翼飞行器以及狭义的微型四旋翼飞行器。由美国Draganflyer公司研制的Draganflyer系列四旋翼飞行器是遥控航模四旋翼飞行器的典型代表,从Draganflyer l到Draganflyer X8,此公司己经成功研制了多种类型的遥控航模四旋翼飞行器。以Draganflyer III为例,该飞行器采用碳纤维和高性能塑料作为机体材料,续航时间为16至20分钟。飞行器通过机载电子设备控制四个旋翼的转速,并且使用了三个压电晶体陀螺仪进行飞行器姿态控制。
目前,国外对于微小型四旋翼飞行器的研究工作主要集中在设计自主飞行控制系统上,德国Microdrones公司的Md4-200、美国宾夕法尼亚大学的HMX4和瑞士洛桑联邦科技学院的OS4为典型代表。
Md4-200是由德国Microdrones公司研发的可自主飞行的微小型四旋翼飞行器。其机身完全用碳纤维材料制作,这样的设计不仅使飞行器具有更小的重晋和更高的强度,也使其具有更强的抗电磁干扰的能力Md4-200控制单元的核心是姿态、高度和航向参考系统AAHRS(Attitude Altitude and Heading Reference Systems),其中集成了气压计、陀螺仪、磁力计、加速度计等多种高精度传感器并配置了先进的控制算法,这使得Md4-200自主飞行控制能力较强。Md4-200可以预定飞行轨迹,让其按照预定的航线自主飞行,采用GPS实现定位和导航的功能,使用Micro-SD卡作为飞行记录仪实现数据存储功能。
HMX4是由美国宾夕法尼亚大学GRASP实验室研制,它可以通过室内的红外光辅助惯性测量单位进行姿态检测,从而实现自主稳定飞行、翻转、避障、目标识别和着陆等功能,具有很强的控制稳定性和鲁棒性。
OS4是瑞士洛桑联邦科技学院EPFL开发的一种微小型四旋翼飞行器,其研究目标是通过完善的机构设计和采用自主飞行控制算法完成室外和室内环境中的自主飞行。目前,EPFL 已经成功研制出OS4和OS4I系列飞行器,并在2004年己经成功将诸如PID、反步控制、滑模控制等多种控制算法应用在OS4上,实现了飞行姿态控制。2006年,OS4I实现了在室内基于惯导的自主悬停控制。
斯担福大学研制的Mesicoper是狭义微型四翼巧飞行器的代表,是目前最著名的微型飞行器之一。其体积和重量都很小,首次实现了厘米级飞行器的飞行和应用。另外,Mesicoper 采用自主飞行控制系统,实现了自主飞行和多飞行器协同飞行的功能。
国际上针对四旋翼飞行器的研究己经相当广泛和深入,但在国内,目前这一方面的研究成果还比较少。在国内,开展四旋翼飞行器研究工作的高校主要有国防科技大学、北京理工大学和上海交通大学等,并各自都取得了一些成果:另外,也有很多中国企业参与其中,较为突出的是深圳大疆创新公司。
国防科技大学机器人实验室于2004年就已经开始了对微型四旋翼飞行器的相关技术研究工作,并成功研制了四旋翼飞行器的原型样机,目前不仅完成了飞行器控制系统硬件的开发和调试,而目重点开发了微惯性测最单元MIMU(Miniature Inertial Measurement Unit)。另外,他们还进行了反步控制、自抗扰控制等多种控制方法的研究,并已经取得了不错的成果。
北京理工大学智能机器人研究所着重对四旋翼飞行器的结构和动力特性进行分析,自行研制开发了一种微型四旋翼飞行器,并在此基础上,进行了一些基于PID控制算法的姿态控制的研究工作。
上海交通大学微纳米科学技术研究院对四旋翼飞行器也进行了一系列研究工作,其主要研究方向侧重于非线性拉制和强耦合系统的辨识及建模方面,研究人员分别设计了PID控制算法和反步控制算法,并将二者控制结果进行对比,说明了反步控制的优越性,并将此成功应用到四旋翼飞行器控制中去,研制出了能负载离地飞行的四旋翼飞行器。
在企业方面,中国深圳大疆创新科技有限公司(DJI)在研制多旋翼飞行器方面一直遥遥领先于中国其它企业,已经成为全球领先的无人飞行器研发厂商。其中,DJI在2015年推出了Phantom 3、2016年Phantom4、2017年掌上无人机……支持移动IOS系统和Android系统操作,操作简单便捷,飞行器从原来的续航时间25分钟提新至40分钟左右,有效信号距离2公里提升至30公里左右,电量不足或失去信号源时可自动飞回原位置,可靠性较高,深受消费者喜欢。
二、无人机发展方向(多轴)
1.多轴无人机的优点
20世纪90年代后期,随着自动控制理论、多旋翼动力学模型、非线性估计算法、新材料以及电池技术的快速发展,多旋翼无人机所需技术走向成熟,导致其近年来呈现出井喷式的发展,应用也愈加广泛,这也是由其优势所决定的:是可垂直起降、悬停、侧飞、倒飞,飞行稳定,易于编队、协作完成任务;二是体积小、重量轻、噪声小、隐蔽性好,适合多平台、多空间使用:三是冗余度高、安全性好,旋翼数大于6的多旋冀飞行器自身有容错功能,在旋翼单一或成对出现故障时仍能安全降落四是桨叶多采用固定螺距,易于制造,飞行危险性小。五是整体结构简单,相比传统主流直升机更易于维护、经济性较高。
2.多轴无人机的常见应用
空中拍摄 为日常生活中最常见应用技术,同时在许多行业内都有体现。一些影视公司和摄影爱好者利用多旋翼无人机可在空中悬停的特点,搭载高清摄像机载荷,可以拍摄出一些高难度的素材。
公安机关 利用多旋翼无人机噪声小、隐蔽性好这一优点,结合空中拍摄技术对一些犯罪分子的实时拍摄和犯罪证据的取证。
测绘部门 利用多旋翼无人机可以在山间灵活穿梭、低速飞行、悬停观察等优点,对一些环境恶劣,人工测量难度大的高山等进行不同角度的拍摄,能够极大提高拍摄的精度,掌握准确信息,为处置突发情况时,提供有力保障以上只是列举了我们将这一技术应用到比较常见行业工作中,还有许多行业也正在逐步结合这一应用,用科技手段提高工作效率。
电力巡检 日常电力巡线方式为人工通过望远镜和肉眼进行观察,这种巡线方式效率低
观察不全面、受外界环境影响较大。使用多旋翼无人机对输电线路进行巡检可以近距离的在空中对输电线路进行全方位、多角度观察,通过悬停对故障点进行检查、拍摄。同时还能够在复杂地形和恶劣天气的情况下获取最佳现场信息,有效弥补传统方式巡视有死角的缺点。针对一些地形复杂多高山沟壑地区线路径直距离短,不方便人和汽车通行,需要通过长时间的行驶才能到达观测点,但通过操作无人机可以直接飞到下一个观测点直接观测,进而节省了大量时间,从而提高一线电力巡检人员的工作效率。
物资投送 传统的物资运输方式主要有空运、海运和陆运,不同的运输方式有着不同的优点,但这些运送方式大多受自然环境影响严重,针对一些偏远地区由于交通不便导致一些急需物资无法急时送达,因此有可能对人民的生命安全造成严重威胁。多旋翼无人机对飞行环境要求较低,同时易于操作、定位准,载重能力也在持续增加,可在空中完成悬停,因此在一定程度上能完成应急物资的精准投送。如在新冠疫情期间,顺丰无人机完成了对银潭医院防疫物资的精准投送避免了道路限行和小区封闭等因素的影响,也有效的杜绝了人员之间的接触。
通信中继 我国地貌环境复杂,多山地、丘陵和高原,当自然灾害发生时,常会导致公共通信网络瘫痪、卫星通信系统饱和等问题,从而导致通信失联状况。一些灾区处于交通不便地区,因此通讯设备抢修极为困难,短时间内恢复正常通讯不太可能,这对于抢险救灾来说是非常不利的。此时多旋翼无人机就可以携带通信中继设备,充当一个通讯基站,构建成应急局域网,保障通讯畅通。目前系留无人机通过携带足够的化学燃料可使其滞空时间数十小时之久甚至更长,因此依托无人机组建完善的通信系统是完全可行的,确保了灾区与后方抢险部门之间的通讯。
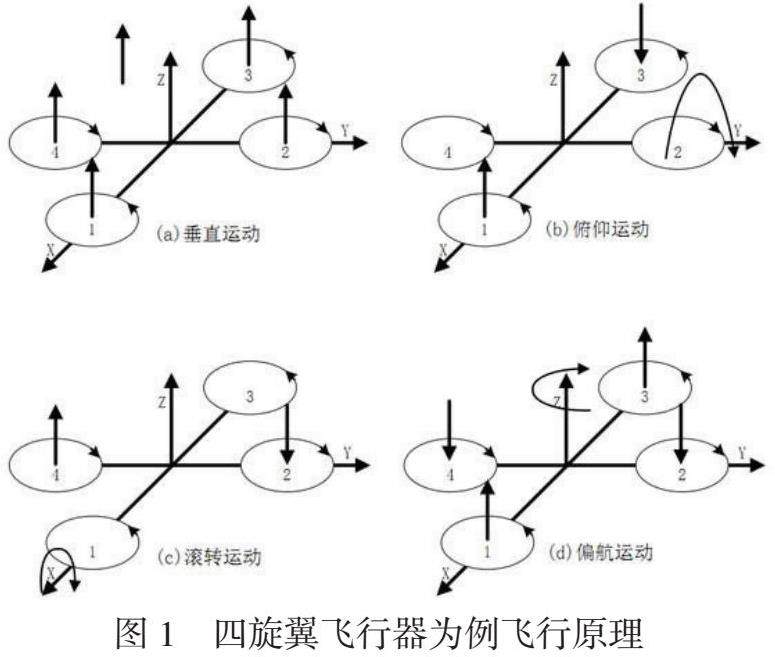
三、无人机控制原理
四旋翼的结构组装有十字模式和X模式之分,通过四个电机的组合状态进行控制姿态飞行。以四旋翼飞行器为例,飞行原理如图1所示,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此飞行器平衡飞行时,陀螺效应和空气动力扭矩效应全被抵消。与传统的直升机相比,四旋翼飞行器的优势就是各个旋翼对机身所产生的反扭矩与旋翼的旋转方向相反,因此当电机1和电机3逆时针旋转时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。
一般情况下,多旋翼飞行器可以通过调节不同电机的转速来实现4个方向上的运动,分别为:垂直、俯仰、横滚和偏航。
四、飞控系统设计
(一)飞控软件设计方法
1.系统功能
1.1实时姿态解算
拟采用MPU6050+IST8310(磁力计)+SPL06-001/MS5611(气压计)的IMU配置,采用I2C/SPI总线进行实时的传感器数据获取,并进行数据融合(互补滤波/Kalman滤波)得到实时的姿态角和姿态角速度数据。
1.2姿态控制
使用PID控制器,根据姿态角误差产生期望的控制量。
1.3位置估计
使用超声波和气压计融合的方式获取无人机当前高度,使用光流传感器来得到无人机的平动速度。
1.4位置控制
通过位置误差产生期望的姿态角,无人机跟踪期望姿态角,从而消除位置误差。
1.5电机控制
根据姿态信息,通过PID控制器产生实时的控制量,使用定时器产生不同占空比的PWM波来控制四个旋翼电机转速。
1.6实时通信
使用数传将无人机的飞行数据实时回传到地面站。
1.7姿态模式
只开启姿态自稳功能。
1.8定高模式
使用姿态自稳+定高控制,在保持姿态稳定的基础上加入高度闭环控制,使无人机达到高度稳定的效果。
1.9定点模式
使用姿态自稳+定高控制+位置控制,无人机三个通道的位置均闭环控制,达到定点的效果。
1.10飞行状态实时显示
通过LED模块显示无人机实时飞行状态。
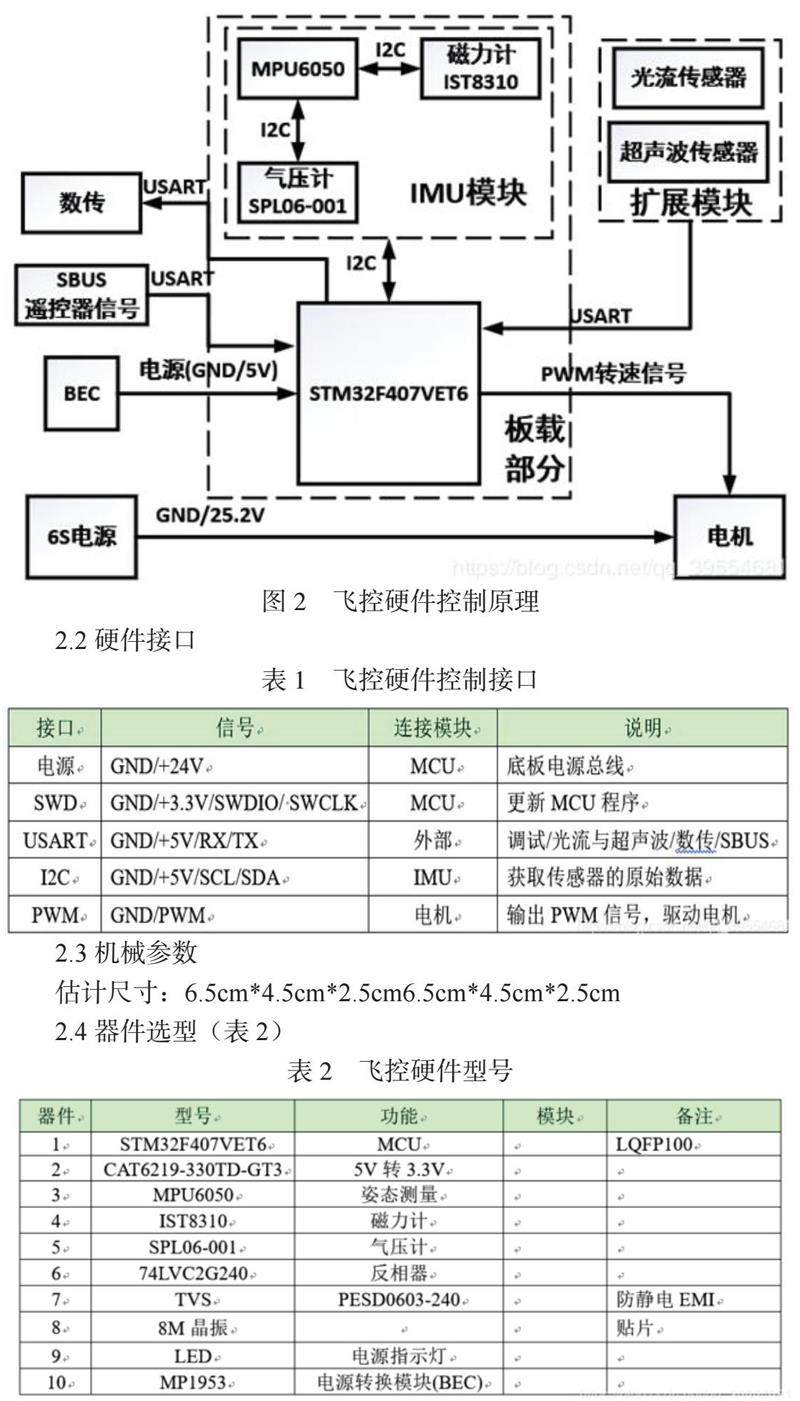
2.硬件方案
2.1硬件原理(图2)
2.2硬件接口
2.3机械参数
估计尺寸:6.5cm*4.5cm*2.5cm6.5cm*4.5cm*2.5cm
2.4器件选型(表2)
2.5硬件设计要点
(1)电机转动带来的震动会对姿态解算精度造成很大影响,所以设计要考虑减震措施。
(2)设计要充分考虑密封防护措施,以提高防尘防水性能。
(3)PCB板上加入测试点,方便检测与调试。
2.6硬件测试方法
(1)电源线路部分的测试,板子上电后检查各个节点电压是否正常,是否有短路和断路的情况存在。
(2)进行MCU的焊接,随后使用简单的例程来测试MCU功能是否正常,焊接是否正常。
(3)使用示波器检测PWM端口输出是否正常。
(4)使用串口输出姿态数据来检测IMU模块是否正常。
3.软件方案
3.1软件功能
(1)通过姿态解算,得到实时的无人机姿态角和姿态角速度信息。
(2)通过扩展传感器模块,得到实时的无人机的位置信息。
(3)通过SBUS通信模块,获得遥控器的各个通道值。
(4)通过PID控制器进行无人机的姿态和位置的控制。
(5)通过LED模块实时显示无人机所处的状态,操控者能在较远视距飞行时得到实时反馈。
3.2模块功能划分
(1)IMU模块
(2)扩展传感器模块
(3)BEC模块
(4)电机控制模块
(5)SBUS通信模块
(6)数传通信模块
(7)LED模块
3.3流程调度
(1)进行LED、IMU、USART、PWM、ADC、TIMER和PID参数的初始化。
(2)IMU传感器测量值通过I2C接口输入MCU,进行姿态解算,更新姿态信息。
(3)根据扩展传感器模块测量数据更新无人机的位置信息。
(4)位置控制器产生期望的姿态角。
(5)PID控制器根据当前姿态信息产生期望的控制量。
(6)将控制量转化为对应占空比的PWM波输入电机,进行转速控制。
(7)将无人机信息通过数传发送给地面站。
(8)更新LED灯的显示状态。
3.4接口定义
(1)IMU模块
输入:IMU原始测量数据;输出:三轴姿态角和姿态角速度,气压高度。
(2)扩展传感器模块
输出:无人机的高度和位置信息。
(3)BEC模块
输入:+25.2V电源电压;输出:+5V电压。
(4)电机控制模块
输入:当前时刻姿态角;输出:经PID控制器生成的PWM波控制量。
(5)SBUS通信模块
输入:SBUS接收机原始数据;输出:遥控器各个通道的值。
(6)数传通信模块
输入:无人机当前时刻的姿态、速度、位置等信息;输出:将无人机信息转换成符合数传协议的数据。
(7)LED模块
输入:无人机当前时刻的状态;输出:显示与该状态对应颜色的灯光。
3.5测试方法
针对每个模块先进行功能测试,在确保各模块功能正常后,进行整块板子的测试。
IMU模块的测试:使用串口输出解算的姿态角,观察输出的信息是否准确,是否存在延时。
SBUS模块的测试:将SBUS输入接口采集到的数据打印至串口,使用串口调试助手观察采集到的SBUS信号是否正常,确保正常后进行下一步的SBUS信号解析工作。
电机控制模块的测试:使用示波器观察PWM输出是否正常,转动传感器观察PWM波形是否有对应的变化,是否存在延迟。
数传通信模块的测试:首先观察数传输出串口是否有稳定且正确的输出;接着连接好整个数传链路,观察地面站是否能接收到正确的信息。
结论
四旋翼飞行器设计主要是完善复杂的控制系统。设计结果表明,本设计基本满足技术指标与功能需求。随着技术的进步,可以预见在不久的将来,四旋翼飞行器将会在更多场合得到应用,面临的场景复杂度和任务难度也会逐渐增加,在复杂条件下的控制精度提出了更高的要求,对四旋翼自主控制的智能化实践设计提出了新的挑战。
参考文献:
[1]曹云峰等.无人机飞行控制系统先进设计技术评述[J].飞机设计,2021(4).
[2]田睿,孙迪飞. 四旋翼飞行器物理数学模型及微控制系统设计[J].电子技术应用,2019.
[3]陈旺才,陈虢,徐君,杭成.基于STM32的四旋翼飞行器姿态控制器设计与实现[J].电子测量技术,2020年19期(第171-174页).
[4]古训,郑亚利.基于STM32的微型四旋翼飞行器设计[J].电子世界,2019年24期.
[5] 孙威,殷兴辉,王新君.基于STM32的频谱测量系统的设计[J].电子技术应用,2019,45(3):102-105,109.
[6]张海军,陈映辉.智能型四旋翼无人机飞控系统的设计与实现[J].计算机运用与软件,2019年4月.
[7]张立.四旋翼无人机控制系统设计与实现[J]. 科学技术创新,2021年第7期.
[8]郎武彪,韦峻峰. 四旋翼无人机长续航飞行模式的设计与实现[J].计算机测量与控制,2022年第2期.
[9]杨东宇,王迎,邓颖. 多旋翼无人机长续航供电闭环控制系统[J]. 现代电子技术,2020,第020期.
作者:黄敏雄:男,湖北武汉人。教授,现从事机械设计与航空设计的课程的研究与教学工作,联系方式:13975364047。
胥刚:男,四川南充人。讲师,现从事机械设计教学工作。
刘鑫:湖南斯凯航空科技股份有限公司 总经理
基金资助:湖南省自科基金项目:能耗优化下四旋翼无人机航迹非凸算法研究(项目编号:2022JJ60060.)

 京公网安备 11011302003690号
京公网安备 11011302003690号


