



- 收藏
- 加入书签

自动行驶小车的创新研究
 打开文本图片集
打开文本图片集




摘要:随着汽车无人驾驶技术的商业化进程不断深入,无人出租车的试点项目已经开始实施,汽车辅助驾驶系统也逐步成为日常交通工具的标准配置,汽车的自动行驶功能正在逐渐成为现实。本项目旨在研究一款以LP-MSPM0G3507为核心控制单元,整合电机MG513X、TB6612电机驱动、MPU6050和灰度传感器等模块的自动行驶小车。通过这些高度集成的组件,实现可调控小车自动行驶功能,以满足不同场景的驾驶需求。
关键词:自动行驶,电机驱动,集成
一.绪论
1.1 研究背景与意义
随着科技的快速发展,自动行驶技术已经成为汽车工业的一个重要发展方向。无人出租车的试点和汽车辅助驾驶系统的普及,标志着自动行驶技术正逐步进入商业化发展阶段。自动行驶小车作为该技术的一个重要分支,其研究和开发对于未来智能交通系统具有重要意义。本项目旨在通过集成先进的控制单元和传感器模块,实现小车的可调控自动行驶功能,为智能交通系统的发展提供技术支持和理论基础。
1.2自动行驶技术的概述
自动行驶技术涉及多个领域,包括机器视觉、传感器技术、控制理论等。通过这些技术的综合应用,自动行驶小车能够实现环境感知、传递数据、执行控制等功能。目前,自动行驶技术已经在多个领域得到应用,如无人仓储、智能物流等。本项目将重点研究自动行驶小车的几大关键技术,主要包括控制单元、电机驱动、传感器集成等在提高小车的自动行驶性能方面的应用。
二.相关模块介绍
2.1 核心控制单元LP-MSPM0G3507
自动行驶小车采用的核心控制单元为LP-MSPM0G3507。它是一款高性能的微控制器,采用80MHz Arm Cortex-M0+ 内核,具有丰富的片上模拟外设,能够满足不同规模的程序和数据存储需求,如 图1所示。
2.2 电机模块
小车采用MG513X作为电机模块。该电机模块是一种具备性价比高、减速比适中的直流减速电机。MG513X电机中的霍尔编码器能够实现测速和确定转动方向等功能,适合于驱动自动小车,如图2所示。
2.3 传感器模块
小车采用的传感器模块包括MPU6050陀螺仪和八路灰度传感器。MPU6050能够精确测量小车的角速度和位置,而八路灰度传感器则用于识别轨迹线,为小车的循迹功能提供数据支持, 如图3、4所示。
三.系统方案的论证与选择
3.1 主控芯片的选择
作为本项目的核心控制单元,LP-MSPM0G3507负责处理来自传感器的数据,并输出控制信号以调节电机转速,实现小车的自动行驶。
3.2 寻迹模块的对比
方案一:八路灰度传感器
八路灰度传感器具有多通道检测能力,可以同时检测地面上八个位置的灰度值;并且灵敏度高,可以适应多种循迹要求。以及具有精确度高、稳定性好和响应速度快等特点,能够快速地适应环境变化及精确地跟踪线路,较好地提升循迹性能。
方案二:红外传感器TCRT5000
红外传感器TCRT5000具有耗能低、体积小巧、成本低廉等优势,但容易受环境干扰和检测距离受限制[1],尤其是在检测范围内出现与被检测物体反射特性相似的其他物体时,可能会引起误判,从而加剧循迹难度。
综合上述两种方案,采用方案一。
3.3 驱动方案
MG513X电机的高性价比和适中的减速比,以及小体积便于安装的优势使其成为小车驱动方案的理想选择。
3.4 电机驱动模块
方案一:L298N
L298N采用双极性晶体管,具有效率相对较低、发热过高等问题,可能需要额外的散热措施,价格较TB6612稍高;故其更适合在的对驱动功率要求较高、对成本不太敏感的场合。
方案二:TB6612
TB6612双驱动模块与L298N相比具有较低的价格;TB6612具有大电流MOSFET-H桥结构,可同时驱动2个电机[2];并且采用MOSFET管,效率相对较高,发热较小,更适合用于循迹小车的电机驱动板块。
通过比较,此项目设计只需驱动小型直流电机,故采用方案二。
3.5 陀螺仪模块
MPU6050中的陀螺仪具有高动态特性,能精确测量角速度,可用于动态环境下的角度测量;并且MPU6050精密度高,稳定性好,具有高精度的传感器和数据处理电路,可以自动校准和自适应,能够在多种环境下保持精准稳定的运行。
四.理论分析
4.1小车自动行驶误差分析
本项目中自动行驶小车要实现按指定路线行驶的功能。直线行驶是奠定此功能的基础,因此小车控制方案中需要去考虑两个电机间速度差的问题。采用TB6612FNG双路电机驱动输出PWM波来控制电机的速度保持一致,尽最大可能保证小车直线行驶,但在直线行驶过程中,电机存在不可避免的系统误差,这会导致小车直线行驶的过程中逐渐偏离原来的路线。通过MPU6050传感器反馈航向角yaw值来判断小车的偏离误差,再通过PID算法中适合的Kp、Kd参数来调节电机转速,使小车回到正轨继续保持固定角度的直线行驶。
4.2 小车轨迹控制
应项目需求,小车需实现变向转弯的功能,小车在弧线循迹时,遇到弯道并且行驶速度过快时,容易出现偏离路径甚至会冲出路径或小车摆动幅度过大的问题,可通过八路灰度传感器返回误差值,然后将误差值代入PID公式,利用PID算法控制两个电机的速度差解决该问题。
五.电路与程序设计
5.1 电路设计
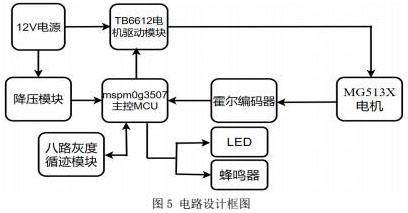
首先使用12V电源对TB6612电机驱动模块供电,由电机驱动模块给MG513X电机供电;其次经过降压模块,由降压模块对主控MCU进行供电[3],由控制单元同时给八路灰度循迹模块、LED二极管、蜂鸣器供电,并获取八路灰度循迹模块和霍尔编码器的电平信号,同时对LED二极管和蜂鸣器输出电平信号;最后由电机进行输出,霍尔编码器读取电机数据,将数据发送给控制单元,本项目电路设计框图如图5所示。
5.2程序设计
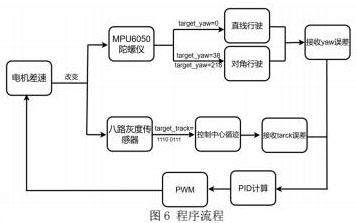
本项目程序流程如图6所示,包括以下部分:
①系统初始化:初始化MPU6050传感器和电机控制模块,用于获取小车当前的偏航角度(yaw)和驱动小车行驶。
②目标偏航角度设定(target_yaw):程序中设定了三个不同的目标偏航角度:0度(直线行驶)、38度(对角行驶)和218度(改变行驶方向)。这些目标角度用于指导小车按照预定的路径行驶。
③偏航角度误差获取:通过MPU6050传感器实时获取小车当前的偏航角度,计算目标偏航角度与当前偏航角度之间的误差。
④PID控制:使用PID(比例-积分-微分)控制算法来计算PWM(脉冲宽度调制)信号[4]。PID控制算法根据偏航角度误差来调整电机的PWM信号,以减少误差,使小车朝向目标偏航角度行驶。
⑤电机差速控制:根据PID计算出的PWM信号,控制小车的电机差速,实现转向,电机差速控制使得小车能够实现直线行驶、对角行驶或改变行驶方向[5]。
⑥循迹传感器:使用八路灰度传感器来检测小车路径上的轨迹,传感器接收到的轨迹误差信息被用来辅助PID控制,以实现更精确的路径跟踪。
控制中心:控制中心根据传感器数据和PID控制算法来调整小车的行驶状态,确保小车能够稳定地沿着预定路径行驶。
六.测试方案与测试结果
6.1 测试方案
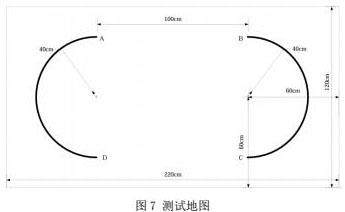
小车按照地图(如图7所示)不同路径行驶。
准备一辆双驱小车,使用TB6612FNT电机驱动控制MG513X电机,采用MPU6050传感器控制电机速度,进而控制小车实现直线行驶功能和固定角度转向功能,再通过八路灰度传感器使小车的自动行驶拥有巡线功能。使用多个按钮控制小车进入不同工作模式,最后在小车车身安装蜂鸣器与LED灯实现声光提示。如图8所示。
6.2 测试步骤
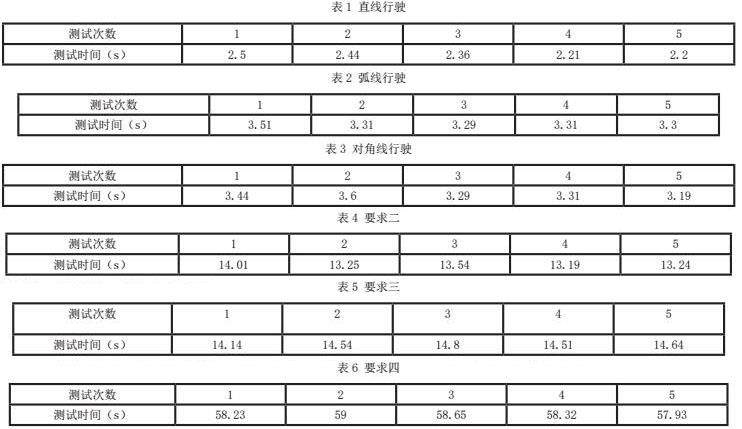
(1)将小车放置到标志点A,开启小车;小车指示灯闪烁并且蜂鸣器鸣叫,小车进入直线行使模式;从标志点A行使到标志点B,小车指示灯闪烁并且蜂鸣器鸣叫,小车停止,满足要求一时间,如表1所示。
(2)将小车放置在标志点B(标志点D),测试小车到达标志点C(标志点A),测试小车自动循迹模块代码是否正确,并且记录小车行驶时间,如表2 所示。
(3)将小车放置在标志点A(标志点B),小车到达标志点C(标志点D),测试小车对角线行驶时代码是否正确,并且记录小车行驶时间,如表3所示。
(4)将小车放置到标志点A,小车直线行驶到标志点B,再弧线行使到标志点C,直线行驶到标志点D后,弧线行使至起始点标志点A,,满足要求二时间,如表4所示。
(5)将小车放置到标志点A,小车对角线行驶到标志点C,再弧线行使到标志点B,对角线行驶到标志点D后,弧线行使至起始点标志点A,满足要求三时间,如表5所示 。
(6)要求三重复执行四次,最后一圈到标志点A后停止,完成要求四,小车行驶总时间如表6所示。
6.3测试分析
根据设计思路,将小车在相应的地图上,进行测试及数据采集,依据采集的结果分析误差产生的原因,并对相关的参数进行优化调整。
6.4 测试结论
根据上述测试数据可以得出以下结论:
1.本项目采用程序的分块思想,将完整的程序剖析开来,将每一步的程序错误指出并改正,可以使完整的程序能够顺畅、精准、高效、稳定地完成每步的操作。
2.本项目通过对MPU6050做的重要改善,将小车行使前产生的误差消除,给直线行使和对角线行驶的准确性和提供稳定性。
3.经相关测试,通过多次参数调整及程序优化,该自动行驶小车能良好地实现各个功能。
七.总结与展望
本项目通过集成先进的控制单元和传感器模块,成功实现了自动行驶小车的设计和开发。测试结果表明,小车具有良好的自动行驶性能,能够满足智能交通系统的应用需求。
未来,本项目将继续优化小车的控制算法,提高其在复杂环境下的适应能力,并探索自动行驶技术在更多领域的应用。
参考文献:
[1]朱春华.基于红外反射式传感器TCRT5000的循迹小车设计[J].现代电子技术,2018,41(18):143-146.
[2]孙逸洁,马蕾.具有发电功能的储能小车[J].电子制作,2022,30(07):26 -29.
[3]刘守丛.大负载智能小车的设计研发[D].山东:中国海洋大学,2016.
[4]宋小春,陈雨.储罐底板自动漏磁检测小车的路径规划与运动控制[J].中国机械工程,2014,25(12):1634-1638.
[5]杨家树,庄志红,郁春丽.应用OV6620数字摄像头实现小车的智能控制[J].常州工学院学报,2013,26(01):28-32.

 京公网安备 11011302003690号
京公网安备 11011302003690号


