



- 收藏
- 加入书签

采用压电应变单元有序堆叠结构实现多振动模式的微型机电装置
 打开文本图片集
打开文本图片集
摘要:基于多种振动模式的压电器件在高科技领域得到了广泛的应用,实现了机械能和电能之间的高效转换。压电器件的单一振动模式或耦合振动模式的激发主要受到压电材料的结构和性能的制约。然而,对于一般应用中常见的压电材料,如锆钛酸铅陶瓷,压电基体中的大多数压电系数存在为零的情况,这导致许多潜在的压电振动模式无法被有效激发,从而制约了压电器件的设计和性能优化。
为克服这一挑战,本研究提出了一种创新性的结构设计,采用了有序堆叠的压电应变单元,以实现所有非零的压电系数。这一设计方案能够在压电器件中引发多个振动模式,为实现人工耦合多振动模式提供了有效途径。
关键词:振动模式、压电基体、人工耦合
1.引言
随着微机械、微制造、微创机器人、微电子等高科技领域的迅速进展,对于高运动性、小型化和高分辨率的机电设备的需求不断增加。相较于传统的电磁电机/执行器,机电设备具有响应速度快、噪声低、尺寸紧凑以及无电磁干扰等优势,因此在近20年来引起了广泛的关注。这些机电设备已被广泛应用于航空航天精密定位系统、自动变焦镜头、生物技术和医学领域,以及纳米/微机电系统(NEMS/MEMS)等领域。此外,由于压电器件的输出功率密度几乎不受尺寸变化的影响,因此它们有望同时实现小型化、纳米级分辨率和快速响应。
在外加电场的激发下,压电材料通过反压电效应可产生应力和应变,从而使其在驻波下振动。利用两种正交振动模式的耦合是压电电动机中最常见的驱动原理,如第一纵向(L1)模式和第二弯曲(B2)模式的耦合。然而,为了实现更高的输出速度,这类器件通常将最长的一侧作为驱动端,导致其难以进行小型化和集成。此外,在超声波装置中由于摩擦驱动而存在死区,因此位移分辨率一般在亚微米级。为满足压电器件的需求,采用均匀的压电应变单元和边界条件来同时实现所有非零压电效应和耦合振动模式的超材料显得尤为关键。
2.研究介绍
在本研究中,采用了一种实现全人工振动模式的方法,即iλ-模态,其中i = 1、2、3;λ = 1、2、3、4、5、6,对应于所有非零压电系数。为了系统地解释有序堆叠结构中压电应变单元的构建方法,通过拓扑结构的协同应变效应展示了压电应变单元、有序堆叠结构(OSSPSU)和全参数人工振动模式之间的关系。在这一设计中,横向振动模式(表现为伸展或收缩变形)和弯曲振动模式的顺序并未受到限制,图1仅展示了第x次或第y次弯曲振动模式的一部分。在OSSPSU的构建中,利用压电应变单元,并将其有序排列在三维空间中。在交流电(AC)电场的作用下,OSSPSU沿首选方向产生较大的变形,通过压电应变单元之间或之间的协同应变效应实现相应的人工振动模式。OSSPSU的详细设计分为两个部分:诱导正常应变的OSSPSU和诱导剪切应变的OSSPSU。具体而言,OSSPSU的正常应变可以通过横向振动模式实现,这基于剪切-扩展或正常-扩展的拓扑结构。另一方面,OSSPSU的剪切应变可以通过弯曲振动模式实现,这基于剪切弯曲或正常弯曲的拓扑结构。在拓扑结构的表达式中,第一个词(“shear”,“normal”)对应于压电应变单元的应变类型,第二个词(“extension”,“bending”)表示OSSPSU的人工振动模式。
3.有效性研究
在这一设计中,我们采用了双单元的有序堆叠结构(OSSPSU)作为示例,通过有限元模拟、理论分析、压电定子测量和实际装置演示来验证实现全人工振动模式的方法的通用性。
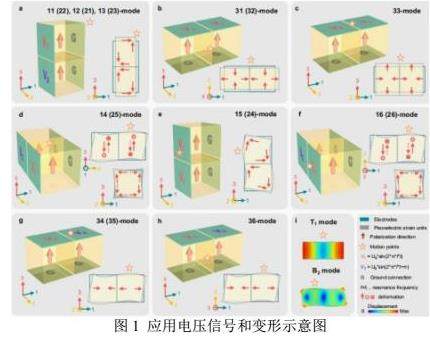
图1展示了双单元OSSPSU的示意图。利用有限元法(COMSOL多物理),我们能够激发全人工振动模态。在图中的所有OSSPSUs中,压电应变单元沿3轴正向极化,所有人工振动模态都在无应力边界条件下被激发。为了诱导正常应变(例如第一横向(T1)振动模式),我们采用了两种方法:(1)利用15或24模的压电应变单元构建剪切-延伸拓扑结构(图2a);(2)利用31、32或33模的压电应变单元构建正常-延伸拓扑结构(图2b、c)。在弹性张力拓扑结构中,如图2a所示,压电应变单元沿3轴堆叠,并在垂直于1轴的表面上施加相位差为π的交流电场V1、V2。在这种情况下,两个压电应变单元的剪切应变相反。因此,整个OSSPSU显示出沿1-、2-或3轴的积分延伸或收缩变形,分别对应于人工的11-、12-或13-模式。
同样,在图1b、c中,当v1、v2应用于垂直于2轴的OSSPSU表面时,将激发24模的压电应变单元。这意味着人工22、21、23模态对应的OSSPSU也可以用剪切扩展结构来构建。在这些情况下,沿3轴的相同电压下,具有正常延伸拓扑结构的OSSPSU沿1轴、2轴、3轴显示延伸或收缩应变,分别对应于人工的31-、32-和33-模式。
为了诱导剪切应变(例如第二次弯曲(B2)振动模式),我们采用了两种方法:(1)利用15或24模的压电应变单元构建剪弯曲拓扑结构(图2d-f);(2)利用31、32或33模的压电应变单元构建正常弯曲拓扑结构(图2g、h)。如图2d、f所示,压电应变单元沿2轴堆叠,并在垂直于1轴的平面上施加两个相位差为π的交流电场。这两种方法均可诱导相反方向的剪切应变(ε13)。通过这些设计和验证方法,我们证明了该方法的通用性和有效性,为实现全人工振动模式的压电器件提供了理论和实验基础。
由于协同应变效应的存在,OSSPSUs在垂直于1轴(图2d)和3轴(图2f)的平面上呈现整体弯曲变形,分别对应于人工14模和16模。对于代表人工15模态的OSSPSU(图2e),两个压电应变单元沿3轴堆叠。在弯曲振动模式下,在垂直于1轴的单元的表面上施加相同的电压。这样一来,就会激发OSSPSU的人工15模态,并在垂直于2轴的平面上观察到扭曲行为。类似地,人工25、24和26模对应的OSSPSU可以通过使用基于24个模式的单元来构建。
基于相同的结构机制,通过改变压电应变单元的有序排列、尺寸或数量,也可以实现完整的人工振动模式。得注意的是,由于共振状态下的应变耦合和较强的机电耦合效应,OSSPSU在某些特定区域的应变可能达到极高的值。这一设计框架为实现多种人工振动模式提供了广泛的灵活性和可调性。
4.可行性研究
为了验证OSSPSU的可行性,我们制备了一个耦合模式的OSSPSU定子,并对其性能进行了详细的分析。值得注意的是,超声波电机与其他压电器件的工作原理在于两个正交运动方向的耦合。由于剪切应变和法向应变可以产生所需的正交运动,OSSPSUs可以成对组合,例如11模和15模OSSPSU对、33模和34模OSSPSU对、31模和36模OSSPSU对。在这里,我们演示了31-36耦合振动模式的OSSPSU定子。为了有效地激发这个31-36耦合模OSSPSU定子的正交运动,31法向模和36剪切模的谐振频率应尽可能接近。
因此,我们设置了晶体和陶瓷OSSPSU定子的尺寸,分别为5mm长×1.3mm高×1.06mm宽(HLR = 0.26)和5mm长×1.3mm高×3.24mm宽(HLR = 0.26)。在这两种情况下,我们通过精心设计的结构,确保了OSSPSU的31法向模和36剪切模的谐振频率相近。这样的设计不仅考虑了性能的有效激发,还注重了OSSPSU定子的实际制备可行性。
5.总结
总的来说,本研究受到超材料设计概念的启发,提出了一种有序堆叠结构的压电应变单元(OSSPSU),该结构能够激发压电材料中的全人工振动模式,包括压电动力学和/或实现超高应变。本文以31-36耦合模式为例,成功制备了一种基于两个[001]极化PIMNT晶体压电应变单元的OSSPSU。在20V/mm的电场条件下,该OSSPSU表现出31-36耦合模式的高应变(ε6达到0.026%)。进一步基于该OSSPSU设计制造了微型线性压电电机,其尺寸为5mm长×1.3mm高×1.06mm宽。由于OSSPSU定子在31-36耦合模式下具有超高的应变(ε6),晶体OSSPSU电机表现出卓越的单位体积速度(4.66s^(-1)mm^(-2)),且移动分辨率达到3 nm,比当前的超声波压电电机高出两个数量级。
综合以上特征,本文的研究为osspsu的设计提供了新的途径,有望促进先进压电器件的发展。通过引入超材料设计理念,我们成功实现了全人工振动模式的激发,为未来高性能和小型化压电器件的设计和制造提供了有力的基础。这项研究的成果不仅在理论上推动了压电器件的发展,同时也在实验上取得了显著的性能提升,为相关领域的工程应用提供了新的可能性。
参考文献:
1.Mashimo,T.& Izuhara,I.S.Design and evaluation of a micro linear ultrasonic motor.Sens.Actuat.A-Phys.278,60–66(2018).
2.Gao,X.Y.et al.Piezoelectric actuators and motors:materials,designs,and applications.Adv.Mater.Technol.5,1900716(2019).
3.Li,Z.M.et al.Designing artificial vibration modes of piezoelectric devices using programmable,3D ordered structure with piezoceramic strain units.Adv.Mater.34,e2107236(2022).
4.Mohanty,A.et al.Vibration energy harvesting:a review.J.Adv.Dielect 9,1930001(2019).
5.Uchino,K.Piezoelectric actuators 2006.J.Electroceram.20,301–311(2008).
6.Li,G.et al.Self-powered soft robot in the Mariana Trench.Nature 591,66–71(2021).
7.Zhakypov,Z.,Mori,K.,Hosoda,K.& Paik,J.Designing minimal and scalable insect-inspired multi-locomotion millirobots.Nature 571,381–386(2019).
8.Jurenas,V.,Kazokaitis,G.& Mazeika,D.3DOF ultrasonic motor with two piezoelectric rings.Sensors 20,3(2020).
9.Jafferis,N.T.,Helbling,E.F.,Karpelson,M.& Wood,R.J.Untethered flight of an insect-sized flapping-wing microscale aerial vehicle.Nature 570,491–495(2019).
10.Gao,X.Y.et al.A piezoelectric and electromagnetic dual mechanism multimodal linear actuator for generating macro- and nanomotion.Research 2019,8232097(2019).
11.Gao,X.Y.,Xin,X.D.,Wu,J.G.,Chu,Z.Q.& Dong,S.X.A multilayered-cylindrical piezoelectric shear actuator operating in shear(d15)mode.Appl.Phys.Lett.112,152902(2018).
12.Ito,S.,Troppmair,S.,B.Lindner,B.,Cigarini,F.& Schitter,G.Longrange fast nanopositioner using nonlinearities of hybrid reluctance actuator for energy efficiency.IEEE T.Ind.Electron 66,3051–3059(2019).
13.Ko,H.-P.,Jeong,H.& Koc,B.Piezoelectric actuator for mobile auto focus camera applications.J.Electroceram.23,530–535(2008).
14.Zhou,T.Y.et al.A nut-type ultrasonic motor and its application in the focus system.Chin.Sci.Bull.54,3778–3783(2009).
15.Chorsi,M.T.et al.Piezoelectric biomaterials for sensors and actuators.Adv.Mater.31,e1802084(2018).
16.Chen,X.et al.A spiral motion piezoelectric micromotor for autofocus and auto zoom in a medical endoscope.Appl.Phys.Lett.108,052902(2016).
17.Li,J.X.et al.Micro/nanorobots for biomedicine:delivery,surgery,sensing,and detoxification.Sci.Robot.2,eaam6431(2017).
18.Ranzani,T.et al.A soft modular manipulator for minimally invasive surgery:design and characterization of a single module.IEEE Robot 32,187–200(2016).
19.Christianson,C.,Goldberg,N.N.,Deheyn,D.D.,Cai,S.Q.& Tolley,M.T.Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators.Sci.Robot 3,eaat1893(2018).
20.Park,T.& Cha,Y.Soft mobile robot inspired by animal-like running motion.Sci.Rep.9,14700(2019).
21.Zhang,J.J.et al.A miniature standing wave linear ultrasonic motor.Sens.Actuat.A-Phys.332,113113(2021).
22.Uchino,K.Micro piezoelectric ultrasonic motors.J.Electroceram 13,394–401(2004).
23.Eerenstein,W.,Mathur,N.D.& Scott,J.F.Multiferroic and magnetoelectric materials.Nature 442,759–765(2006).
24.Tomikawa,Y.,Takano,T.& Umeda,H.Thin rotary and linear ultrasonic motors using a double-mode piezoelectric vibrator of the first longitudinal and second bening modes.Jpn J.Appl.Phys.31,3073–3076(1992).
25.Aoyagi,M.& Tomikawa,Y.Ultrasonic motor based on ccoupled longitudinal-bending vibrations of a diagonally symmetric piezoelectric ceramic plate.Electr.Commun.Jpn 79,560–567(1996).

 京公网安备 11011302003690号
京公网安备 11011302003690号


