



- 收藏
- 加入书签

基于协作机器人的智能卡搬运系统的设计与研究
——以Gemalto智慧工厂改造项目为例
 打开文本图片集
打开文本图片集
摘要:Gemalto是一家制造生产智能卡的企业。我司(上海一芯智能科技有限公司)作为供应商为 Gemalto的工厂做智能化改造。Gemalto工厂为了减少人力,准备将智能卡搬运部分的工序全部交给协作机器人,用机器人代替人从事重复的搬运工作。运用协作机器人,对协作机器人进行编程,通过程序,让机器人从流水线上抓取智能卡,放入装智能卡的塑料盒中。
本次论文就以Gemalto智慧工厂改造项目为例,重点介绍基于协作机器人的智能卡搬运系统。首先,对智能卡搬运系统作简要概述,讲述该系统的基本组成、基本功能、结构特点,以及系统涉及到的技术参数设定值等。其次,对该系统中运用到的关键技术进行分析,分别说明协作机器人技术、二维工业相机技术,以及定位抓取技术,是如何实现的。然后,对整个系统进行集成,将各个功能模块整合在一起,通过编写机器人程序,实现搬运智能卡的操作控制,最终完成无人自动化搬运的工序。最后,对本次论文进行总结,分析优缺点,并展望未来,该如何优化智能卡搬运系统。
关键词:搬运系统;协作机器人;二维工业相机;定位抓取;
Abstract:This paper takes the Gemalto smart factory renovation project as an example, and focuses on the smart card handling system based on collaborative robots. First, a brief overview of the smart card handling system is described, describing the basic composition, basic functions, structural characteristics of the system, and the technical parameter settings of the system. Secondly, the key technologies used in the system are analyzed, explaining how the collaborative robot technology, two-dimensional industrial camera technology, and positioning and grabbing technology are implemented. Then, the entire system is integrated, and the various functional modules are integrated together. By writing a robot program, the operation control of the smart card handling is realized, and the unmanned automated handling process is finally completed. Finally, this paper summarizes the advantages and disadvantages of this paper, and looks into the future, how to optimize the smart card handling system.
Key words: Handling system, collaborative robot, two-dimensional industrial camera, positioning and grasping
1.引言
选题背景及课题研究意义:现如今,劳动力成本越来越高,以往的劳动密集型产业无法支撑过多的人力资源,逐渐开始用机器人来替换人力进行工作。一年一度在上海举办的中国国际工业博览会上,也跟随时代的潮流,特地开辟一个机器人专区。机器人领域的相关展览和技术展示传递出行业发展的多个新动向,小型化、轻量型、协作机器人正在成为工业机器人的发展新趋势。中小企业借力协作机器人迈向工业4.0成为推动工业机器人市场高速发展的重要驱动力,人机协作将更精准助力智能制造。本次选题的背景是以Gemalto智慧工厂改造项目为例,通过引入协作机器人,等其他机械与电气设备,实现工业4.0的改造。
借助此次的项目,对智能卡系统进行深入的设计与研究。我所在的机器人事业部,通过调研了解客户的需求,准备设计一个基于协作机器人的智能卡搬运系统的方案。通过于协作机器人的智能卡搬运系统的实施与落地,可以进一步地展示机器人事业部的实力,为公司未来在智能制造领域的战略发展做铺垫。尤其是在整个智能工厂改造的领域,此次基于协作机器人的智能卡搬运系统将会树立一个标杆,实现机器人应用行业创新的意义。
智能卡搬运系统设计研究的目的:智能卡搬运系统设计研究的目的,从基于协作机器人的角度出发,通过协作机器人,以及配套的机械与电气等设备,最终实现无人化并灵活控制智能卡搬运过程的目的。同时,通过参与到该系统的设计与研究的工作中,可以积累自己在集成系统类项目中的工作经验。在积累经验的同时,可以进一步深化学习协作机器人的编程技术。同时,可以思考并探究在未来,智能制造行业的发展趋势,如何将协作机器人更好接入到生产制造中去。将更多的工人从枯燥的、无意义的、反复劳作的操作工作中解放,去做其他更有益身心的事情。让机器人更好的替人类去承包这些重复性的工作。本次系统的设计与研究,就是为了通过协作机器人,来实现智能卡搬运系统,最后可以满足客户的需求,达到Gemalto智慧工厂改造的无人化运转的效果。
2.智能卡搬运系统概述
2.1 智能卡搬运系统的基本组成
智能卡搬运系统由协作机器人、卡夹机构、卡盒部件、推车机构,以及吸盘固定部件组成。其中,协作机器人是系统的主力军,在系统中起主导作用。卡夹机构是协作机器人的手掌。帮助协作机器人抓取智能卡和放置智能卡。卡盒是用于放置智能卡的部件。推车是用于放置卡盒的部件。吸盘固定部件用于固定推车,让推车与地面保持固定不动的状态。
2.2智能卡搬运系统的基本功能
智能卡搬运系统的基本功能主要是根据Gemalto智慧工厂改造项目的客户方的要求来实施的。下面将本次 基于协作机器人的智能卡搬运系统最终能够实现的搬运功能做详细的说明。
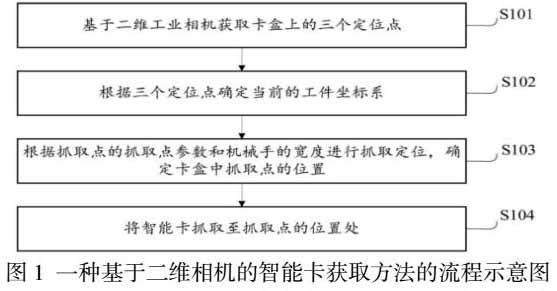
本系统是基于二维相机进行的智能卡精确获取定位,并抓取与放置的功能。实现该功能,首先要基于二维工业相机获取卡盒上的三个定位点。其次,根据三个定位点确定当前的工件坐标系。然后,根据抓取点的抓取点参数和机械手的宽度进行抓取定位。接着,确定卡盒中抓取点的位置。最后,将智能卡抓取至抓取点的位置处。采用本系统,可以指导机器人精确抓取卡盒内的智能卡,提高机器人在狭小环境中对智能卡的抓取准确度。
2.3智能卡搬运系统的结构特点
每个系统都具有独特性,围绕Gemalto智慧工厂改造项目的需求,下面将阐述本次智能卡搬运系统的结构特点。
配合本系统能够顺利实施,还需要一款定制化的卡盒。该卡盒包括盒体,盒体内部开设有多个卡槽。在卡槽之间预留用于夹取卡片时的宽度。同时,盒体上开设有打孔的点位,凭借打孔点位与上述的六轴协作机器人设置的工件坐标点的点位保持一致。还有,在盒体底部有3个凸起部,用于作为放置盒体的推车的打孔点位。这款定制化的卡盒解决了自动化生产线缺少能配合自动化生产的多功能卡盒的技术问题。
除了卡盒,放置卡盒的推车也是重点设计的。这种辅助式推车,包括车体、固定面板和滚轮,分别设置在所述车体的上端面和下端面。这种辅助式推车解决了以解决由于常规的自动导引运输车运输过程中采用人工来进行搬运,造成的自动导引运输车需要在运输过程中配合人工搬运来中断作业,等待合适的运输时机,无法进行流水线式的无缝衔接的工作模式的技术问题。
3.智能卡搬运系统设计实现
二维工业相机与机器人通信,相机通过拍摄识别抓取点,将信息传送给机器人,机器人收取信号并精确抓取智能卡。精确抓取的获取方法对于实现工业自动化生产,以及机器人在工业中的广泛应用起着非常重要的作用,是完成机器人自动搬运的前提。
目前,基于待抓取智能卡的卡盒模型,卡盒模型的公差大,精度超过3毫米。但是,抓取智能卡的精度要求较高,误差不超过2毫米。机器人抓取智能卡的范围狭小。在实际的机器人抓取系统中,由于X轴,Y轴,Z轴方向上的偏差,造成抓取算法很难直接成功应用于实际机器人抓取系统,进一步限制了机器人抓取系统的应用和发展。系统的实施是基于二维相机的智能卡搬运系统,可以指导机器人精确抓取卡盒内的智能卡,提高机器人在狭小环境中对智能卡的抓取准确度。
S101,基于二维工业相机获取卡盒上的三个定位点。系统可以控制二位工业相机的拍摄中心点对准放置智能卡的卡盒的三个定位点上,依次拍摄各定位点的白黑图像。
需要说明的是,上述三个定位点,其中两个可以位于卡盒对角线的两端,另一个位于一边的中线上。三个定位点中的位于对角线上的两标定点可以确定一平面坐标,加上另一标定点就可以确定当前的工件坐标系即卡盒当前的坐标系。
S102,根据三个定位点确定当前的工件坐标系。具体的,系统可以提取上述三个定位点的平面边缘轮廓,根据平面边缘轮廓对上述三个定位点进行定位标定,标定后可以确定当前的工件坐标。
S103,根据抓取点的抓取点参数和机械手的宽度进行抓取定位,确定卡盒中抓取点的位置。在进行抓取智能卡之前,可以预先设置好卡盒的抓取点参数,该参数可以是卡盒的大小、所含卡槽的个数(即可以放置智能卡的个数)每个卡槽的宽度等。进一步的,系统可以在当前的工件坐标系下分析抓取点的抓取参数和机械手的宽度之间的关系,进而确定卡盒中抓取点的位置。例如,卡盒长35mm,其中有10个卡槽,每个卡槽宽度为3mm,机械手宽度为2mm,可以确定卡盒中抓取点为第一个卡槽处。
S104,将智能卡抓取至抓取点的位置处。具体的,抓去点的位置确定后,系统可以将智能卡抓取至卡盒的对应位置处。一个卡盒中的卡槽有多个,放置好一张智能卡后,系统还可以根据卡盒的放卡位置(即卡槽)对抓取点进行偏移计算,定位卡盒中的其他抓取点,例如,将抓取点通过阵列的方式偏移,控制机械手依次运动至其他抓取点,放置智能卡,直至一个卡盒中放置智能卡结束,再到新的卡盒地点,结合二维工业相机,拍摄新的卡盒的三个定位点。
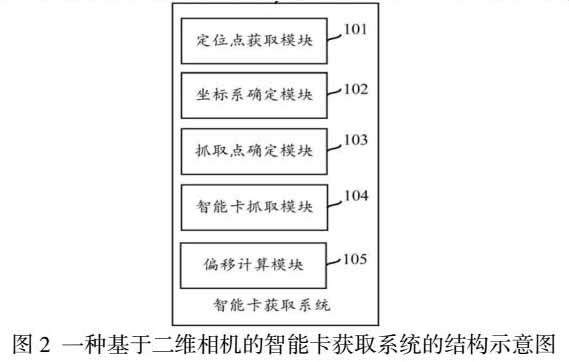
本次的协作机器人搬运智能卡的系统也可以称之为,基于二维相机的智能卡获取系统。该系统可以分为5个模块,分别是定位点获取模块、坐标系确定模块、抓取点确定模块、智能卡抓取模块、偏移计算模块。
定位点获取模块101,用于基于二维工业相机获取卡盒上的三个定位点。坐标系确定模块102,用于根据三个定位点确定当前的工件坐标系。抓取点确定模块103,用于根据抓取点的抓取点参数和机械手的宽度进行抓取定位,确定卡盒中抓取点的位置。具体用于在工件坐标系下分析抓取点的抓取参数和机械手的宽度之间的关系,确定卡盒中抓取点的位置。智能卡抓取模块104,用于将智能卡抓取至抓取点的位置处。偏移计算模块105,用于根据卡盒的放卡位置对抓取点进行偏移计算,定位卡盒中的其他抓取点。
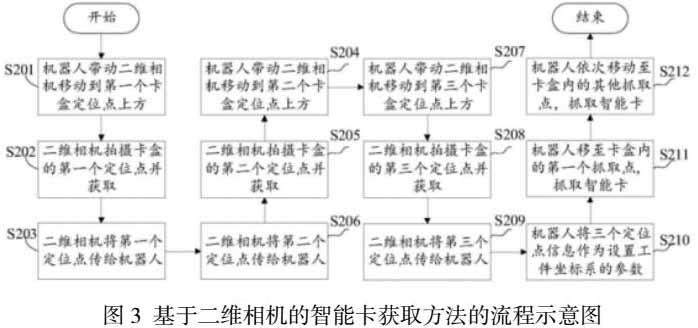
S201,机器人带动二维相机移动到第一个卡盒定位点上方。S202,二维相机拍摄卡盒的第一个定位点并获取。S203,二维相机将第一个定位点传给机器人。S204,机器人带动二维相机移动到第二个卡盒定位点上方。S205,二维相机拍摄卡盒的第二个定位点并获取。S206,二维相机将第二个定位点传给机器人。S207,机器人带动二维相机移动到第三个卡盒定位点上方。S208,二维相机拍摄卡盒的第三个定位点并获取。S209,二维相机将第三个定位点传给机器人。S210,机器人将三个定位点信息作为设置工件坐标系的参数。S211,机器人移至卡盒内的第一个抓取点,抓取智能卡。S212,机器人依次移动至卡盒内的其他抓取点,抓取智能卡。
4.结语
本论文主要研究的课题是基于协作机器人的智能卡搬运系统的设计。我司为实现在智能制造领域的建设,承接了Gemalto智能工厂改造项目。通过Gemalto智能工厂改造项目,将协作机器人作为改革产线的重点进行深入研究,拓宽协作机器人技术的应用领域。
本次系统是有效指导机器人精确抓取卡盒内的智能卡,满足了工业生产的快速性、准确性和可靠性的要求,使机器人在狭小环境中对智能卡的抓取准确度达到100%,为工厂的工业4.0改造做了很好铺垫。同时,通过二维相机和机器人就能快速地控制机器人精确抓取卡盒内的智能卡,满足了工业生产的要求。解决方案的性价比高,通过低成本的二维相机,并集合机器人的工件坐标,完成了需要花费高成本的三维相机做的工作。
参考文献:
[1] 周文博. 智能协作机器人与柔性产线技术. 电子技术与软件工程,2017;20:94
[2] 易焕银,潘伟荣,郝建豹,林子其,詹华广. 结合Dalsa工业相机和ABB工业机器人的码垛系统. 电脑知识与技术,2019;15:273
[3] 谢邦晋. 基于机器视觉的工业机器人定位抓取技术. 内燃机与配件,2018;273:222
[4] 付乐,武睿,赵杰. 协作机器人安全规范. 机器人,2017:540.
[5] 蒋亚妮,张为民,蒋涛. 机器人智能搬运系统的构建. 机械制造,2017;2:9
[6] 孙树栋. 工业机器人技术基础.陕西:西北工业大学出版社,2007:163
[7] 王厚余. 低压电气装置的设计安装和检验.北京:中国电力出版社,2007:252
[8] 姚舜才,付巍,赵耀霞. 电机学与电力拖动技术.北京:国防工业出版社,2006:277

 京公网安备 11011302003690号
京公网安备 11011302003690号


