



- 收藏
- 加入书签

城市道路交通主动控制系统与模型设计研究
 打开文本图片集
打开文本图片集

摘要:为了智能化控制城市道路交通,缓解交通压力,需要设计城市道路交通主动控制系统与模型,可以实现交通控制的实时性和先进性。系统通过交叉口主动控制,根据实际数据仿真结果开展主动控制,有效控制交叉口通行车辆,减少平均排队的程度。本文分析了城市道路交通主动控制系统与模型,对于实际工作起到参考作用。
关键词:城市道路交通;主动控制系统;模型设计
城市道路交通控制工作可以保障人们日常出行的安全性,同时关系到出行效率和舒适性。智能交通控制系统主要是利用交通控制器缓解交通压力。交通系统比较复杂,根据交叉口构建被控对象数学模型,在交通控制领域中利用数据驱动技术,利用系统输入和输出实现控制和决策工作。城市交通控制建模工作具有复杂性,再加上交通拥堵的迫切性,为人工智能发展提供机遇。通过设计城市道路交通主动控制系统与模型,综合利用平行仿真和云计算以及边缘技术等,优化系统各部分功能,促进城市道路交通健康发展。
一、概述城市道路交通主动控制系统的架构
城市道路交通主动控制系统不断提高控制和计算要求,在系统设计过程中构建实时控制子系统和实时仿真子系统以及可视化软硬件。
1.设计控制和仿真子系统主要是利用平行系统理论,并且根据城市交通管理需求,利用实时仿真子系统快速的验证和优化新型控制策略和交通管理理念,此外利用实时控制系统可以现场执行被验证控制策略,利用可视化软硬件,可以高效对接实时控制子系统和实时仿真子系统[1]。
2.可视化软硬件可以发挥出连接和展示作用,管理人员和研究人员因此可以把握城市道路交通的现状,在环系统中,利用可视化软硬件可以提出模拟控制策略,掌握交通运行状态,利用现场实时数据,映射出现时交通,也可以利用实时仿真子系统数据,在环系统中,利用可视化软硬件呈现出仿真交通。城市交通管理人员可以因此确定交通控制效果,同时可以根据不同的交通场景提出新的控制策略。
3.云边端支撑子系统,利用虚拟化技术实现信息存储和计算功能,此外可以利用系统GPU资源为人工智能技术应用奠定基础。利用边缘计算方式可以保障信息安全性,同时可以发挥出现场计算功能。城市交叉口在未来发展过程中将会汇聚各类交通场景数据,因此需要提高边缘侧信息安全性和计算能力。
(二)实时控制子系统
我国交通出行需求具有地域性特征,分析我国交通出行方式,以机动车为主要内容,同时混合非机动车和机动车出行。利用实时控制子系统综合这一特征,可以选择多种被控对象,并且可以结合交通需求选择控制算法库。一方面利用传统交通控制算法,另一方面是利用主动控制算法。根据多种检测数据确定控制策略,此外还设计了失衡指数和饱和指数等评价指标,可以保障控制策略评价反馈的直观性和合理性。此外系统可以同VPN在线升级和备份保护机制等,避免因为工作人员工作失误引发交通安全问题[2]。
(三)实时仿真子系统
实时仿真子系统主要负责分析和验证信息信号,这一系统的仿真主体是中观视角的交通流,确定仿真控制策略对于仿真交通流的影响,因此迭代优化控制策略。在仿真过程中,为了保障交通流的可视化,并且准确的标定交通流动力学参数,可以利用SUMO仿真软件爱你设计仿真驱动引擎。
在设计实时仿真子系统的过程中,系统主要是利用检测器数据和GIS数据等,同时根据历史检测数据累积交通流特性和跟驰特性等,可以实时修正检测数据。落实控制策略的过程中,利用实时仿真子系统可以支持开发新的控制策略,封装处理检测数据,从而形成标准的输入输出变量,在数据库中保存控制变量。根据不同场景设计不同的控制策略,利用平行仿真架构交互实时仿真子系统和实时控制子系统,证明新的控制策略具有可靠性,可以向实时控制子系统中直接推动数据,并且可以在现实环境中执行。
二、城市道路交通主动控制模型
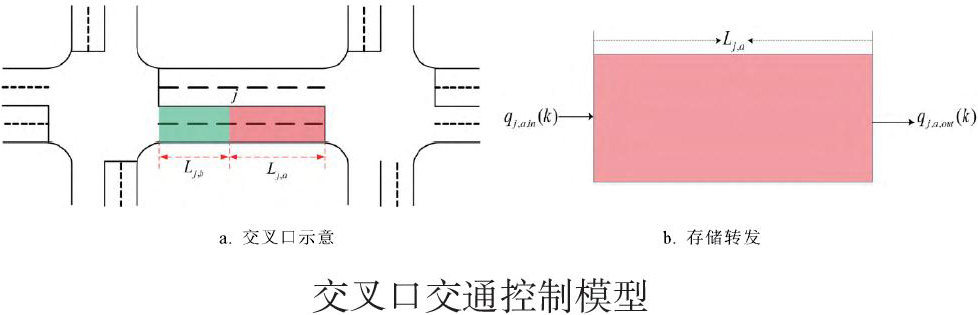
根据车占用物理问题,城市道路交通控制的实质是控制道路时空资源分配,通过建立主动控制模型,根据周期和绿信比调节等,转变交叉口信号被动控制为交通口主动控制。在城市交叉口交通管控过程中,主要是利用车道和相位以及相位绿灯时间等时空变量,在构建主动控制模型的过程需要综合考虑各种变量。
结合上图,交叉口主要包括内部冲突区域和上下游连接路段,设交叉口连接路段集合中路段为j和a的状态方程如下,表示在采样周期k+1中路段j和路段a的车辆数量,也就是采样周期k中路段j和a上车辆数和流出车辆数之差的和。其中,nj,a(k)表示路段j和a在采样周期中的车辆数量。qj,a,in(k)代表采样周期中上游路段向路段j和a发送的车辆数。qj,a,out(k)代表采样周期中,路段j和a向下游发送的车辆数。
nj,a(k+1)=nj,a(k)+qj,a,in(k)-qj,a,out(k)
为了动态化显示出车道属性,结合车道基因概念,通过描述车道转向属性,最终输出控制变量。车道转向属性包括左转和右转以及直行,分别利用L、R、T代表,因此车道基因基本组成单元包括L、R、T。
为了验证城市道路交通主动控制系统的有效性,利用系统实时仿真子系统开展仿真对比验证,通过仿真验证道路交叉口实际流量数据,选择的交叉口为核心路口,交叉口采用的周期为150s,并且在车道上安装地磁检测器,因此获得流量数据,在交叉口固定配置阶段,可以从交通支队获得。对比分析交叉口车辆总行程时间和平均排队长度,利用主动控制模式,交叉口车辆总行程时间比较短,同时平均排队长度也比较短,因此可以确定主动控制具有显著的控制效果[3]。
结束语:
本文分析了城市道路交通主动控制系统与模型设计,综合利用主动控制和平行仿真等技术,并且对比验证交叉口,对比传统固定控制方式,主动控制模式具有更大的优势,但是需啊哟在大规模路网空中中应用城市道路交通主动控制系统和仿真应用,开展有效性检测。
参考文献
[1]胡笳,安连华,李欣.面向新型混合交通流的快速路合流区通行能力建模[J].交通信息与安全,2021,39(01):137-144.
[2]王嘉文,陆依宁,李少波.非常态条件下城市道路网络交通信号控制方法综述[J].中国水运(下半月),2020,20(03):128-131.
[3]杨文臣,张轮,田毕江,胡澄宇.城市道路交通信号自适应控制方法研究综述[J].交通科技,2017(04):152-157.

 京公网安备 11011302003690号
京公网安备 11011302003690号


