



- 收藏
- 加入书签

工业机器人在LCD显示器废弃物自动化拆解流水线中的应用探索
 打开文本图片集
打开文本图片集
摘要: 本文主要分析LCD显示器废弃物自动化拆解流水线,提出工业机器人的应用建议,旨在为增强废弃物自动化拆解效果提供帮助。
关键词:工业机器人;LCD显示器;废弃物自动化拆解流水线;应用
近年来在国家电子废弃物元器件拆解行业发展的过程中主要采用人工拆解的措施,工作效率较低,成本费用较高,很容易因为拆解操作不合理导致重金属污染物、有机污染物等进入生态环境,不仅会破坏环境还会危害人员的身体健康。而在LCD显示器的废弃物自动化拆解流水线中采用工业机器人技术,就可以提升整体的工作效率、稳定性、可靠性、精确度,预防污染物对环境和人体造成的伤害。因此在新时期的LCD显示器废弃物拆解的过程中应重点关注工业机器人技术的运用,合理设计相关的自动化拆解流水线系统,充分发挥工业机器人运动灵活、速度快、精确度高的优势,提升整体的工作水平和质量。
1 工业机器人分析
工业机器人的主要组成部分就是设备主体,结构驱动系统,结构和控制系统结构三个部分,其中设备主体主要就是机器人底座的部分动作、执行机构的部分,涉及到机器臂方面、机械关节方面与机械手方面,一些机器人还设置了行走机构。而驱动系统又涉及到动力装置设备、传动机构的设备,动力装置用来进行动作执行机构的各类动作驱动,制系统就是根据事前所编辑的输入运行程序,发出驱动系统部分与动作执行机构的动作指令与具体的控制信号。工业机器人在应用的过程中要是将数控机台的伺服轴部件和遥控操纵器的连杆部件相互连接,通过预先将编程输入到机械手臂的动作,此类系统就能够脱离人的操控,属于独立性运行的状态。在机器人示教作业的过程中机械手臂会根据具体的顺序,经过每一项业务的点位,预先设置点位的数据信息记录存储在控制器的存储器内部,另外,机器人在作业的过程中每个轴关节在伺服电机设备的驱动之下,会一次再次显现出运行所经过的每个点位,此类技术又被称作是可编程技术与示教再现技术。
工业机器人的发展可以将其分成以下三代:第一代工业机器人就是在国际领域商品化与使用化发展期间的可编程工业机器人,又被称作示教再现工业机器人,简而言之就是为了使得工业机器人能够完成某项作业任务,操作者先利用工业机器人完成与任务相关的操作,做出运动的轨迹、作业的条件、顺序和时间示教,利用直接或是间接的方式对工业机器人进行示教,等待其将知识记忆之后结示教再现的具体指令,确保精确度符合标准的同时重复再现被示教的具体动作;第二代工业机器人,一般情况下指的就是具备一定智能功能的智能化机器人,主要涉及到触觉智能功能、力觉智能功能和视觉智能功能,简而言之,就是传感器经过触觉、力觉和视觉方面的信息计算机处理以后,对机器人操作机进行控制,确保可以完成具体的操作任务,上个世纪80年代美国就已经开始在汽车装配线中设置了工业机器人的视觉系统,使得新时期的智能化工业机器人问世;第三代工业机器人就是“只治式”的工业机器人,不仅具备一定的感知功能,还具有较高的决策能力和规划能力,目前已经成为制造业领域中不可或缺的装备,国际中大约有70万以上台工业机器人正在和生产制造工作人员共同在生产线中,尤其是在特种机器人问世以后,凭借着强大的功能和作用应用到广泛的工作领域,例如:仿人类型、农业类型、服务类型、水下类型、医疗类型、军用类型和娱乐类型等特种机器人受到广泛应用。
2 LCD显示器废弃物自动化拆解流水线
此类流水线建设的目的就是可以按照LCD显示屏的废弃物特点和情况,将其自动化拆解成为液晶屏部分、电路板部分、塑料外壳部分和金属罩部分等,使得各个部分相互独立。在系统运作的过程中需要各个工位之间相互协同,主要涉及到上料类型、切割类型、开孔类型、激光类型、分离类型、回收类型的不同工位,各个工位相互之间使用传送带进行衔接处理,达到流水线工作的目标。在不同工位相互协作的情况下,可以自动化进行废弃物的拆解处理与分类处理,只需要安排一名人员进行操控即可,能够通过安全防护隔离罩维护现场操作环境氛围的安全性和环保性,预防在拆解操作期间出现噪声问题、粉尘问题、有害金属问题等等。但是传统的流水线系统在应用的过程中存在不足之处,无法合理完成各个工位的任务,而在应用工业机器人之后就可以按照不同位置和零部件的情况,增强拆解动作完成效率与效果,具有重要的意义。
3 工业机器人在LCD显示器废弃物自动化拆解流水线中的应用措施
3.1 完善工业机器人的功能
整体的流水线中需要在激光工位方面设置工业机器人,可以通过六轴机器人设备对光纤激光器进行带动,使其能够沿着预先所设定的路径进行LCD显示器废弃物金属屏蔽罩的切割处理。在回收工位也需要设置工业机器人,主要就是在机器人第六轴上面设置滚动刀片部件、吹风机设备、铲刀部件,确保能够准确分离控制电路板的部分、液晶驱动板的部分、液晶显示屏的部分。①完善激光工位位置的机器人应用功能。对于激光工位来讲在运作的过程中需要针对金属屏蔽罩的部分和显示屏电路板的部分进行分离处理,而金属罩是通过卡扣和显示屏相互连接,存在螺钉和电路焊板的部分,需要合理进行切割处理才能确保其和电路板之间迅速分离,而在切割期间需要使用光纤激光器设备处理,将设备在机器人的第六轴位置固定,并且切割期间机器人还需对显示屏进行推动,调整相应的位置,将金属片吸走,所以在第六轴上面需要设计磁铁、金属片,确保能够完成操作任务。同时金属屏蔽罩的部分、显示屏电路板的部分相互是通过六个螺钉所衔接,机器人在做第一个动作的时候需要于六个螺钉位置开孔处理,完成操作之后考虑到侧面电源的部分、串口插座的部分有所凸出,会使得金属屏蔽部分的正常分离受到阻碍,所以需要通过激光将侧面的部分切割。另外,在金属屏蔽罩的侧面区域还存在金属片的结构,罩在液晶屏和电路板相互连接导线的外部区域,此情况下就需确保机器人具备去除这个位置金属片的功能、将连接导线切断的功能,完成开孔操作和切割操作之后,下一个工位,也就是分离工位,可以通过电磁铁吸走金属屏蔽罩,然后设置在回收筐的内部。②重点完善回收工位区域的机器人应用功能。考虑到回收工位在运行期间需要对液晶显示驱动板部分、液晶屏部分的分离处理,将其设置在独立性的回收筐内,而二者之间使用导线材料、连接线材料、胶带材料相互连接,所以在这个工位机器人需要有切割导线和连接线的功能、去除胶带的功能、将电路板部件设置在回收筐的功能。为确保此类动作的高效化完成,应该在机器人中设置刀片、吹风机、铲刀,刀片可以将导线切割,吹风机能够快速使得胶带软化,铲刀可以对胶带进行铲除同时将电路板设置在回收筐的内部[1]。
3.2 完善工业机器人的应用模式
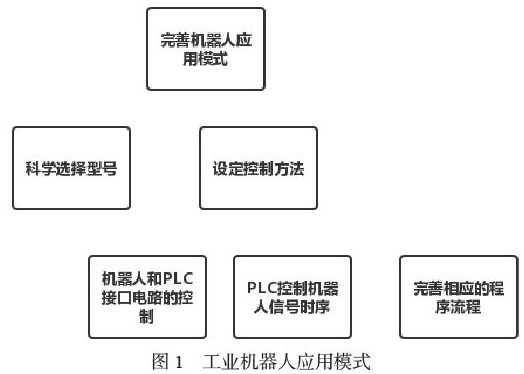
为确保在LCD显示器废弃物自动化拆解流水线中合理运用工业机器人,在完善整体功能之后还需明确具体的应用模式,如图1所示,充分彰显工业机器人的作用价值。
2.2.1 科学选择型号
按照系统整体的需求、机器人的功能特点等可以将工业机器人分成激光工位和分离工位的设备,可结合不同工位选择具有以下几个特点的工业机器人:动作速度较快、能够在30秒钟之内完成工作;灵活度较高、可以在各个工位中完成三个以上的动作、不会在相同的平面;工作的范围只限于LCD显示器废弃物处理方面,按照此类特点科学选择工业机器人的型号[2]。
3.2.2 设定控制方法
1)机器人和PLC接口电路的控制。激光工位工业机器人在自动化拆解流水线中的动作主要是由机器视觉系统、转动汽缸之间相互配合而完成,此类配合需要使用PLC系统进行控制,对于机器人中所设置的激光器设备、磁铁材料,需要利用机器人发出动作的指令,此情况下应合理设置接口电路;回收工位中所设置的机器人,利用PLC控制系统控制各个动作,也需要保证接口电路的合理设置与控制。例如:激光工位采用I/O接线端子,利用PLC系统将机器人动作的启动信号发送到控制器的部分,在机器人完成各个动作之后就可以向PLC系统反馈相关的完成信号。利用机器人控制激光器设备和磁铁部分的动作,将信号直接传输到控制器I/O端口。回收工位设置专门的I/O端口,用来进行外部特殊性指令的接收,同时还能对机器人状态信息进行输出。
图1 工业机器人应用模式
2)PLC控制机器人信号时序。机器人运行期间采用PLC系统进行控制,需要先设定机器人示教器的模式,使其设定成为远程的模式,然后PLC系统发放伺服信号、消除警报的信号、调节主程序的信号、外部启动的信号等,机器人在接收所有信号之后进入到主程序,按照要求执行各类动作。
3)完善相应的程序流程。在激光工位位置的机器人需要和外部区域的视觉机器人相互协同,在激光工位中执行切割金属屏蔽罩的任务,完成相应的动作。回收工位位置的机器人和外部区域的压紧装置之间、机械臂电吹风之间相互配合,准确进行电路板部分、液晶屏部分的分离处理。按照具体的功能要求激光工位的机器人设备需要进行外部伺服处理、消除报警处理、调主程序处理、外部启动处理、开孔操作、侧边切割操作、去除侧面挡板操作、显示器的回拨操作、切割侧面导线的操作,完成任务之后结束进程;回收工位中的系统需要先进行外部的伺服,然后对报警进行消除,调转到主程序的部分,外部启动之后对显示器设备压紧,然后做出驱动板部分、液晶屏部分相互连接导线的切割,使用电吹风吹五秒钟之后通过铲刀处理,电吹风停止之后将对电路板进行推动,使其离开皮带的位置,之后完成所有的动作任务[3]。
结语:
综上所述,LCD显示器的废弃物拆解过程中使用工业机器人设备和技术进行自动化拆解流水线的完善、升级,需要结合具体情况完善机器人的应用功能,合理选择机器人的型号,明确设定其中的控制模式、操作流程,充分彰显工业机器人的应用作用、应用功能,增强拆解操作的可靠性、有效性。
参考文献
[1] 王素娟,秦琴,屠子美. 工业机器人在LCD显示器废弃物自动化拆 解流水线中的应用[J]. 现代电子技术,2019,42(4):175-178.
[2] 付亚南. 狭小空间作业绳驱分段联动机器人设计及控制研究[D]. 黑龙江:哈尔滨工业大学,2018.
[3] 张凯迪. 基于离散元方法的空间爬行机器人微结构修饰粘附足研究[D]. 黑龙江:哈尔滨工业大学,2017.

 京公网安备 11011302003690号
京公网安备 11011302003690号


