



- 收藏
- 加入书签

基于无人天车自动模式下平稳无冲击追绳功能的开发和应用
 打开文本图片集
打开文本图片集
在天车系统和其他吊装、悬挂系统中,经常会遇到由于人工操作不当导致天车抓斗滚筒两边钢丝绳受力不均,导致钢丝绳断裂或者其寿命严重拉低,严重情况下还会间接导致安全事故。
在自动化无人天车和天车智能化改造项目中,特别是在抓斗天车系统中,经常会遇到抓斗滚筒电机两边钢丝承重拉绳受力不均,不仅减少了钢丝绳的寿命,也对抓斗抓取物的称重系统造成了干扰,影响了计量的精确度。现在一些成熟的天车系统本身也带有追绳功能,但就目前来看,在不抑止滚筒电机电流的转矩追绳应用效果较差。一些做无人天车的厂家由于考虑了可移植性,通常也会更换现有系统的全套设备,花费极其昂贵。
本着降本增效的研发精神,我方通过一组2台国产变频器组实现了极端条件下,在不依靠外部编码器的情况下并且吊具满载、天车最高加速比的情况下实现了高分辨率的精准追绳。
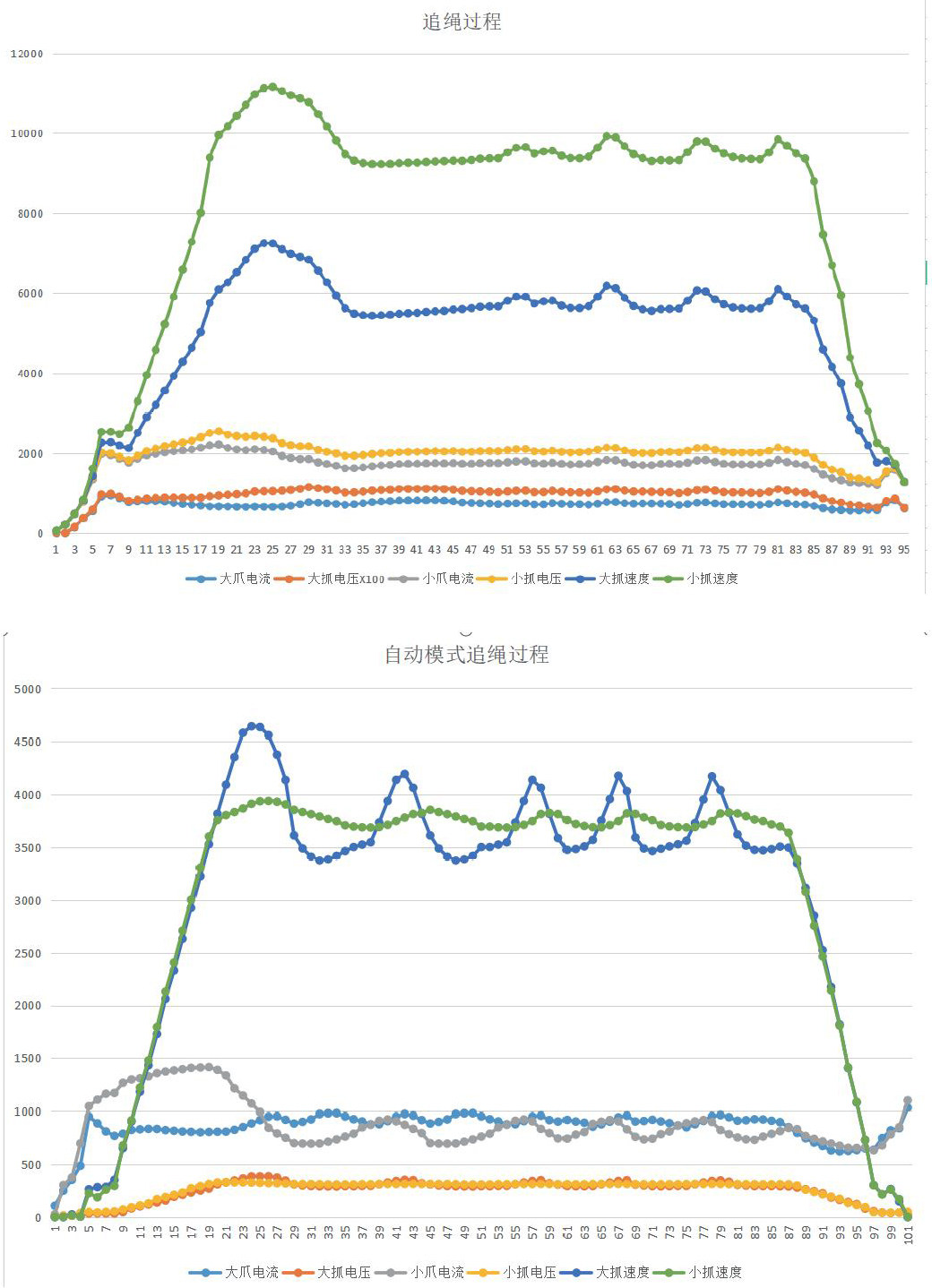
首先肉眼可见的滚筒两边钢丝绳拉紧并不等于钢丝绳受力的两端达到了力的平衡,如下图,由于手动操作的时机没有把握好,相当于滚筒俩电机的动力电流没有抑制,两个钢丝绳的上升速度虽然近似,但是同功率的滚筒电机驱动电流一直不等也没有回收上升下降时重力产生的波动,没有通过驱动电机补偿惯性差异和惯性抖动,最终是同速度不同拉力完成了整个抓取过程。
在自动下模式追绳,通过抑制驱动电流和速度使得急剧上升时所产生的惯性抖动变化力被双端滚筒电机的驱动力吸收过滤,特别时在闭斗拉升的瞬间,在单端绳受力时,程序会快速的寻找交叉平衡点。如图所示,从起始驱动电流点4到电流平衡的第一个交叉点25,间隔21个点(每秒采集10个点的数据)。图示说明追绳完成耗时2秒左右。在追绳成功后,双滚筒的速度也同步了起来。由于抓斗提升在重力加速度的影响下,其实本身的重量是有了实际变化量的,于是出现了双端绳间的惯性抖动。这种抖动会给称重计量系统带来巨大的误差。最关键的是钢丝绳的弹性形变也会对控制用的滚筒旋转编码器带来误差和深远影响。另外从安全的角度上来讲,由于滚筒电机的驱动力吸收了惯性摆动,所以在整个闭斗抓取过程中,抓斗不会因为钢丝绳的惯性形变力产生自旋转,防止了抓斗两端钢丝绳产生缠绕、断裂。这个只是暂时消除了一些的安全风险。本着研发精神,后期在我们做惯性转向时,改功能也是会被限制使用的。通过惯性转向可以精准控制抓斗落点。目前干煤棚的老天车师傅可以手动完成抓斗惯性转弯,甚至可以用抓斗把料坑上的垃圾清理出来,我们始终认为所有技术上的突破都是源于最真实的生活。
3. 成果适用范围:
根据抓斗抓了的目标位置控制主抓斗滚筒的松绳距离,缩短闭斗后的实际追绳距离,在闭斗的瞬间,抑制抓斗和开闭滚筒的驱动电流。从而达到在追绳成功后的速度平衡。在转矩平衡后,继续抑制电流,吸收惯性抖动,使整个过程平稳、有序。最大程度上的延长钢丝绳使用寿命,降低了钢丝绳缠绕的风险。
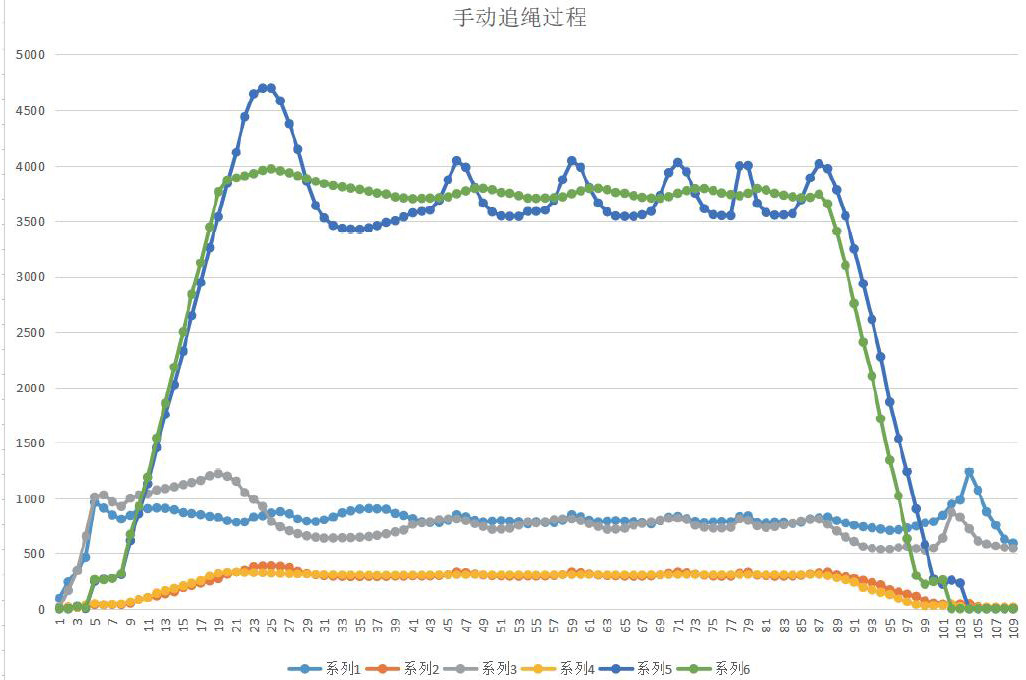
在手动模式中通过主令操纵杆控制天车抓取时,追绳补偿和功能依然有效。
如图所示,在手动操作过程中,两端滚筒驱动速度轴没有重合。说明人工操作对系统的判断过程有略微的影响,总之是机器设备的控制过程更加线性和平滑。
通过后期优化后,抓斗系统追绳的周期更短,过程更加平稳。这个无论是人工操作还是后期的无人自动天车应用前景都是相当广阔的。对我公司来说,既可以打破市场垄断,降低费用。更可用于后期的无人天车、无人料场等应用场景。为智能化、自动化的工艺控制过程积蓄强大力量,勾画壮丽蓝图。

 京公网安备 11011302003690号
京公网安备 11011302003690号


