



- 收藏
- 加入书签

基于多PLC跨平台屏传控制系统平台的应用
 打开文本图片集
打开文本图片集
在自动化工程或集成改造项目中,经常会遇到不同厂家型号的PLC硬件设备,如果需要进行跨平台通讯和控制,往往需要在不同类型的PLC系统两端加装有第三方协议的通讯卡,这无疑增加了我们的硬件成本。
该平台的应用能够对PLC程序开发人员提供非常大的便利,首先它的存在可以使得不同种协议、多种数据格式甚至是高低位不同的数据能够直接进行跨平台的通讯和控制。其次,该平台支持冗余通讯,保证了通讯控制系统的可靠性。还可以有效的降低平台整合难度,降低系统硬件成本。
该平台已实施应用的主体包括:1:基于DEVICE NET总线型通讯的ABB6轴机器。2:基于串行以太网通讯的SMART200西门子PLC。3:基于ControlLogix以太网通讯AB PLC。4:MCGS触摸屏一台。5:基于增量编码器的松下第七轴伺服控制系统。
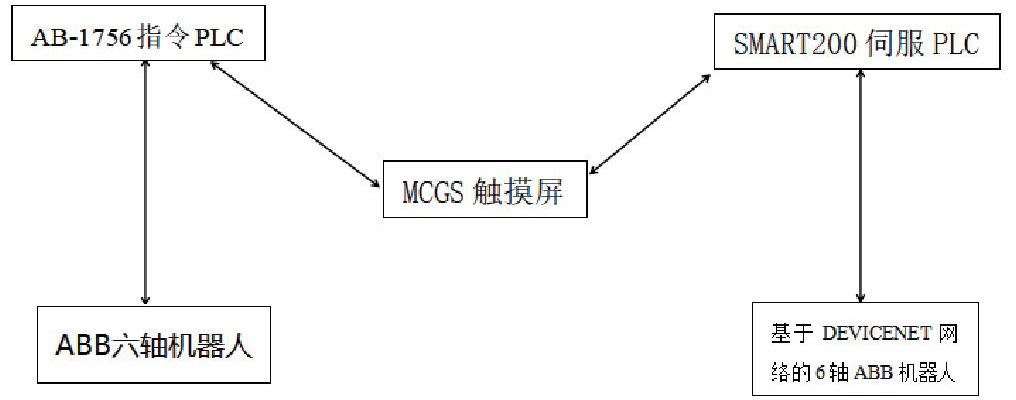
拓扑结构如下:
基于AB 1756 controllogix 以太网通讯的CPU作为机器人控制系统的指令机,控制通过DEVICENET模块与ABB机器人做数据交互控制,随机器人一起运动的第七轴是一种基于松下转矩控制模式的伺服系统,通过SMART200的高速脉冲点进入整个系统的闭环控制,介于中间过程的协议数据转换通过MCGS触摸屏实现协议中间点映射对接。映射完成后所有数据端都可以通过触摸屏进行同步通讯。该种方式能充分利旧,通过技术手段把触摸屏变成了协议转换器,并且触摸屏端可以做冗余数据通讯。
该平台整合了一些通讯驱动,使得触摸屏能够直接或间接的访问各主体数据,为后面的数据传送和控制做数据支持。该平台的数据控制过程包含了如下方面:1:数据同步。2:数据写入映射。3:数据操作过程策略控制。
所搭建平台技术先进性主要体现在以下几方面:
1 化繁为简,每套PLC系统都有自己的私有协议,该平台可以使得初级程序员在不通晓任何协议的前提下进行跨不同PLC平台的编程开发;
2 降低成本,一般的PLC跨平台通讯需要在不同PLC设备的两端增加MODBUS或自由口协议网卡,这种硬件卡价格昂贵,并且配置卡硬件的时候PLC系统需要停机下配置,影响生产节奏。该平台的所有操作都不影响PLC,不需要改配置和下载。在附属设备例如机器人系统中,只用最基础的机器人裸机带的DEVICENET网络就可以完成控制过程的数据交互,不用再次付费新增额外的通讯板卡和模块。
3 该平台支持冗余通讯,屏传故障后自动切换。在PLC系统中只有高版本类型的PLC包含心跳线的冗余网络切换,在一些低版本的PLC系统中,只有通讯卡一发生故障就会丢失数据连接。该平台的冗余通讯和切换成本低,覆盖全面。
4 该平台的策略控制端可以对跨平台的重点数据进行靶向设定,防止技术人员误接线、防止操作人员误操作、防止程序开发人员逻辑漏保护。
5 多端的跨平台跨设备通讯协议的高速数据共享。降低很多了中继硬件的设备成本。
关于机器人控制的网络方式目前主流又大概3种。1:基于POFINET的网络结构。2:基于DEVICENET的的网络结构。3:基于第三方自由口的interface的网络结构。在这里我们主要是利用了DEVICENET的的网络结构,该结构由于是主从控制结构模式,需要在主DEVICENET服务端启动后再启动客户端。但是现场的启动上电顺序是受人为因素影响较大的。因此我们的触摸屏在检测到机器人的POWER ON信号后会主动再次激活主DEVICENET服务端的网络拉起信号,重新建立DEVICENET主从网络的链接。在触摸屏端由于有了各个系统的协议数据映射,可以使得操作员仅从触摸屏端就看到整个网络中的各个CPU心跳状态,网络状态。可以使得原来没有办法通讯的多种CPU读取对方的数据和心跳,从而进行多端的闭合控制,从安全角度上考虑。这样的相互检测与锁定也能进一步提升该控制系统的安全等级。
通过这个平台我们可以把整个的通讯过程变的更简单和透明。方便自己也方便他人。平台的投用使得后期系统的拼接和扩展更容易实现和实施。后期对于集团公司的集中控制,特别是跨厂跨系统的总成控制平台的搭建会也起到至关重要的作用。这个平台如果得以投用,会使得现有系统的每次改造都会成为下次改造的台阶和基础。
该种方式可以建立和应用在多种触摸屏平台上,例如MCGS、威纶通等设备端,利用原有的驱动协议解析驱动,在触摸屏界面底层通过全局脚本进行多端、多协议的数据映射,通过控制数据接收和发射端的数据发送间歇速度来约束不同种类PLC间的数据传输同步时间。经过现场实际测试,我们发现发送压缩过后的指令穿数据时,数据传输的效率会更高。在实际应用中例如在发送模拟量数据类似伺服增量编码器的高速数据时,在20MS左右的通讯间距内在伺服定速或变速的情况下,该平台甚至可以通过触摸屏系统进行跨平台的数据补偿,使得没有高频脉冲点的PLC系统和设备通过协议传递转发的数据直接读取高速脉冲的过程值。由于通讯速度快,数据采样率高,使得第七轴的激光头位置数据在整个应用过程中显的很平滑,没有较大的数据抖动和间歇数据跳跃。稳定的共享了各种PLC系统特殊模块的功能,这种经过改造和编译的触摸屏系统其实更像是一个功能强大的通讯网关,也是一种类似与鸿蒙系统的多端生态系统。通过这种转化会使得我们的工程师在跨平台编程下更容易发挥出各个端系统的优势,在电气控制行业内更容易的完成多端融合、万物互联。
该平台目前应用在安钢集团冷轧捞渣机器人控制系统中,第七轴跟随机器人耦合运动。系统程序、硬件应用稳定,各种协议的数据延时控制在了20ms内。目前靶向数据量为200点位(包含两个激光探头模拟量)。由于整个系统较高的数据采样率使得随动的千元级的松下第七轴伺服系统在总行程近7米的距离上重定位精度控制在了2MM以内。如果计算成本一台屏大概1000左右,一个低端的通讯卡大概4K-5K。后期如果集团公司要搞大规模的控制集成或者主控室合并控制,那么必然会面对两大问题。一是跨控制系统平台通讯,二是各种通讯协议的数据汇总和整合。目前安钢集团有人值守的主控室大概有40-50个,后期应用空间也是巨大的。

 京公网安备 11011302003690号
京公网安备 11011302003690号


