



- 收藏
- 加入书签

基于Yolov3算法与云数据的智能农业管控系统
 打开文本图片集
打开文本图片集
摘要: 本文设计了基于32位单片机与AI芯片K210协同控制的智能农业管控系统。32位单片机通过各种外部环境质量检测模块,实时监测农业环境信息,K210通过Yolov3算法,检测与识别农作物的生长情况。为了方便人机交互,使用2.4G无线通信模块,将检测到的各种农业作物信息,发送至HMI屏幕,可进行实时语音播报提醒,同时,使用ESP8266WiFi模块,将信息通过TCP协议,上传至Labview编写的上位机,实现远程监管。该设计能够实现对农作物生长环境、状况等信息的采集与统筹,借助人工资源,共同构建作物生长最佳范围指标的环境,组成智能农业管控系统。
关键词: 智能农业、农作物监测、Yolov3算法、HMI人机交互、云数据
1引言
近年来,现代科学的迅速进步以及对农业现代化和准确性的日益增长的要求,促使自动控制和无线通信技术越来越多地用于农业生产和管理。快速简便地收集有关植物生长和环境的信息是制约精准农业实施过程中精准农业发展的核心问题。环境传感器的应用是现代农业发展的契机。它们可以为环境监测提供精确的数据,从而为通过自动控制等智能化手段可以做出相应的操作[1]。
本文设计的目的是以简单易操作的设计为主,监测农作物生长环境与生长状况,具有极高的人机交互性能,充分利用嵌入式采集信息的优势,给操作人员以充分的信息反馈,促进相关农业工作的高效进行。
2系统工作流程
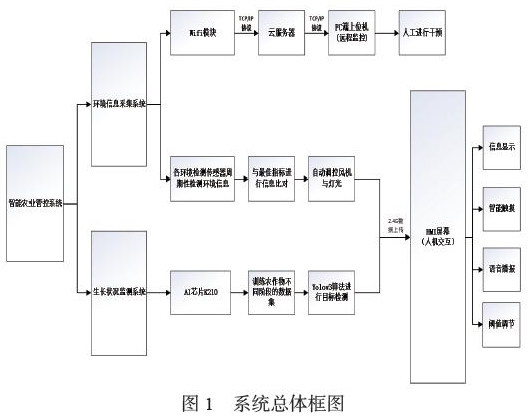
系统总体框图如图1所示。该智能农业管控系统包含两个子系统:农业环境信息采集系统与作物生长状况监测系统。
农业环境信息采集系统:主要监测农作物周围的环境信息,如:空气温湿度、光照强度、二氧化碳浓度等。可远程监控环境信息,然后将检测到的数据发送到计算机上并显示在HMI屏幕上。能够对农业大棚内作物生长过程进行远距离信息采集,并且实时监测各项环境数据。借助大棚里的风机、日光灯、浇水工具进行人工干预,或通过系统的自动控制来构建植物生长的最佳环境。
作物生长状况监测系统:使用AI芯片K210,首先收集农作物不同时期的照片,制作成为数据集,上传至在线平台训练模型,利用得到的模型通过Yolov3算法进行实时目标监测,得到当前农作物的生长阶段、品质等情况,并通过2.4G通信将数据发送至HMI屏幕,进行统计分析与规划。
3硬件设计
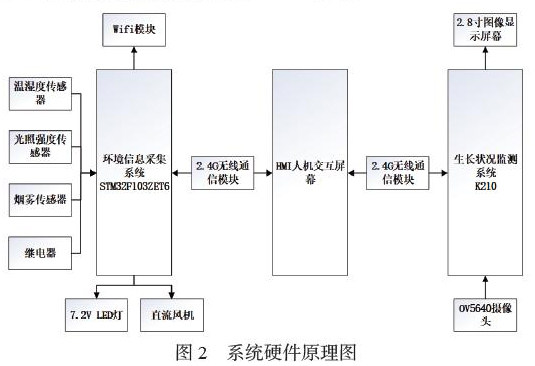
系统硬件主要包括两部分,分别为环境信息采集系统和生长状况监测系统,如图2所示。环境信息采集系统采用STM32F103ZET6单片机作为主控制器,外部传感器有DHT11温湿度传感器、光照强度传感器、烟雾传感器等,通过继电器控制7.2V LED灯的开关,并具有wifi模块ESP8266进行数据上传。环境信息采集系统以K210作为主控制器,利用具有500万像素的OV5640摄像头进行图像采集。两个系统均通过2.4G无线通信模块将数据信息发送至HMI屏幕。
2.1 AI单片机K210
K210是嘉楠科技公司推出的一款MCU,其特色在于芯片架构中包含了一个自研的神经网络硬件加速器KPU,可以高性能的进行卷积神经网络运算,适合本设计用到的Yolov3算法。其处理器架构为RISC-V双核64位CPU,主频为400MHz(超频可到600MHz),算力高达1TOPS,且功耗只有300mW左右,拥有自主IP核,具备试听一体化、可编程能力强等性能。广泛应用于智能家居、智慧农业等领域,适合本设计的管控系统。
2.2 WiFi模块ESP8266
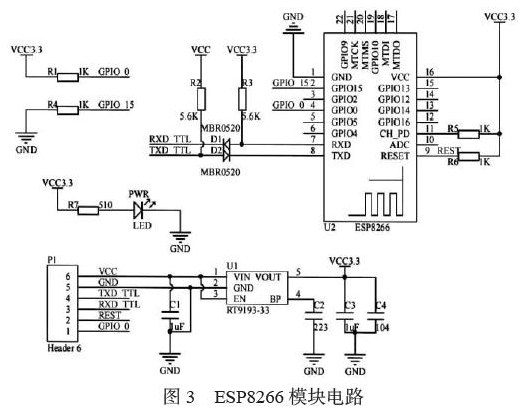
本系统WiFi模块为ESP8266,它是一款应用十分广泛的UART-WiFi(串口-无线)模块。此模块通信距离为70m,利用串口与MCU通信,并内部集成了TCP/IP协议栈,能够实现串口与WIFI的转换,十分适用于物联网设备的通信。其配置需要搭配AT指令就能实现,通过AT指令配置和TCP/IP就能连接到服务器,成为上位机和硬件的桥梁,实现农业无线数据传输。电路原理图如图3所示。
3软件设计
软件设计主要包括农作物环境信息的监测、云数据上传、Yolov3算法在检测农作物方面的应用。
3.1 农作物环境信息的监测
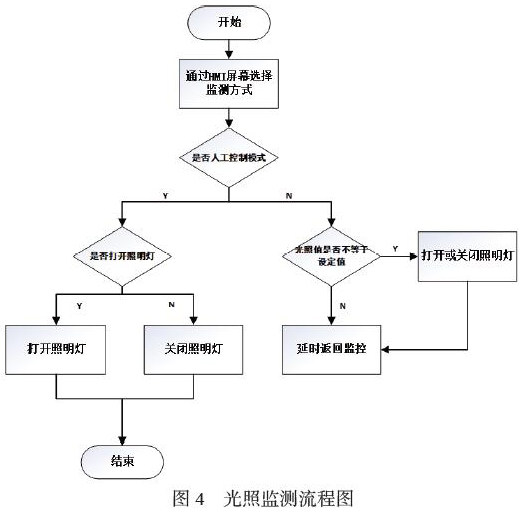
农作物环境信息的监测有两种模式:手动调节模式与智能调节模式,可通过HMI屏幕触摸来选择监测模式。手动调节模式下,由工作人员操作照明灯和电动吹风机的运作,实时显示的环境检测数据,这比智能调控更加精准;智能调节模式下,系统判断当前光照数据超过阈值时,说明当前光照条件充足,系统将在5s后再次发起光照状态识别;反之,则启动相关的控制设施,在无人的情况下最大程度保证合格的环境条件。 以光照信息的监控为示范,如图4所示。
3.2 云数据上传
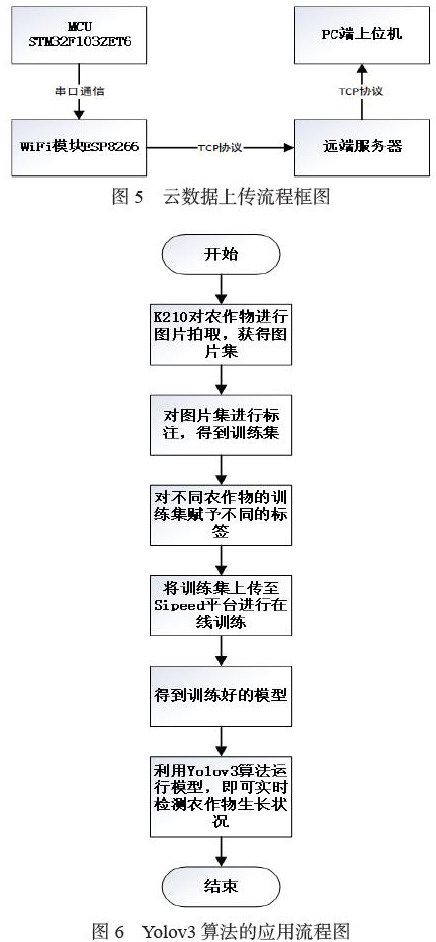
环境云数据上传的简要框图如图5所示,STM32单片机将采集到的环境信息处理,加入帧头与帧尾,打包形成一帧完整的数据,通过串口通讯协议发送给ESP8266WiFi模块,WiFi模块再通过TCP协议[2]发送数据到云端服务器,最后服务器将信息传至PC端的上位机。
3.3 Yolov3算法在检测农作物方面的应用
为实现检测农作物的生长状态、品质(如识别柑橘的好坏),以Yolov3算法为基础,使用python对K210编写相关程序,完成上述功能。具体步骤如下:
首先,获取训练模型所用的图片集。K210本身就可以采集图像数据,利用K210对不同生长阶段的农作物进行拍照(照片分辨率大小为224*224),每个农作物类型取300张左右。然后,处理原始图片得到训练集。由于原始图片中目标物体只占图片中的一部分,则可以利用labelimg软件将所要检测的物体特殊标注出来,得到了训练集,同时对每个训练集分别标上标签(对应不同生长阶段的农作物)。最后,将整个数据集打包,上传到Sipeed模型平台进行训练,等待一段时间后,即可得到训练好的模型文件,在程序中导入模型文件,利用yolov3算法[3],即检测出不同生长状况的农作物。具体流程图如图6所示。
4结束语
本文基于32位微控制器与K210设计了智能农业管控系统,在农业环境监测,农作物生长状况监测方面提出了方案,并且具有较高的人机交互性能,并且将数据实时上传云端,达到远程监控效果。借助人工资源,共同构建作物生长最佳范围指标的环境,推动农业的发展。
参考文献
[1]现代智慧农业设施大棚环境监测系统设计[J]. 张玮.计算机测量与控制.2020(08)
[2]无线多跳网络中Semi-TCP协议的实现[J]. 刘梅,姜胜明,陆以勤.计算机工程.2012(09)
[3]基于YOLO和图像增强的海洋动物目标检测[J]. 贾振卿,刘雪峰.电子测量技术.2020(14)

 京公网安备 11011302003690号
京公网安备 11011302003690号


