



- 收藏
- 加入书签

浅谈三维激光扫描技术在地铁隧道变形中的应用
 打开文本图片集
打开文本图片集
摘要:中国地铁进入建设与维护并重的时期。随着使用寿命的增加,地铁隧道和轨道的病害越来越多且恶化越来越严重。轨道交通中的病害发展是许多安全事故的直接原因。2014年以来,政府、住建部、交通运输部等部门制定了多项加强城市轨道交通建设和运营的政策,引导城市轨道交通行业快速发展。地铁隧道变形是轨道交通诸多病害中比较严重的病害,当前对地铁隧道变形进行检测的先进关键技术主要是三维激光扫描。三维激光扫描技术利用高速激光原理,可以自动、高密度、快速、高精度地测量地理单元表面的三维空间坐标信息。利用从高密度采集的数据,可以实现地理单元的“实景再现”。与传统的单点测绘和制图技术相比,例如该技术具有高度自动化、高精度、大数据、全息和数字空间信息采集等特点。经过几十年的发展,三维激光扫描技术已经日趋成熟,在许多领域得到广泛应用,例如建筑结构逆向工程、文物保护、自动化作业、数字娱乐产业、军事勘察、自然灾害监测预警等。
关键词:轨道交通 三维激光扫描技术 地铁隧道变形
大多数轨道交通结构的检测和维护仍然基于传统的人工检测方法或部分自动监测方法,人工检测方法存在效率低、时间长、智能化程度低、检测结果主观性强、难以在有限时间内完成大量检测工作的问题。通过测量机器人或其他物理传感器实现的部分自动监测方法对变形区的局部位置进行监测,具有局限性。因此,传统的人工检测方法已不能满足地铁隧道维护日益增长的需求,迫切需要一种新的快速、动态的、全信息、高精度检测隧道状况的检测方法。随着激光电子技术和检测测绘技术的横向发展,静态三维激光扫描技术逐渐成熟并成功应用于地铁隧道保护监测。但是,这种方法必须对每个测站点云数据进行点云拼接,这不可避免地导致错误累积。鉴于地铁隧道监测需要高精度整体的地铁隧道数据,静态三维激光扫描的弊端在应用过程中逐渐显现。在传统手段与新技术相协调的基础上,正在考虑采用移动式三维激光扫描仪,将列车车厢与三维激光扫描仪相结合,能够快速高效地采集大量点云数据,获取地理信息,从而弥补了传统监测方式的不足,无需对地铁隧道进行分站扫描,有效避免拼接误差的积累。
1.地铁隧道变形的影响因素
1.1施工期间的影响
城市地下轨道交通的建设发生在地下岩土层下。常见的开挖方法有明挖、覆盖法、暗挖、筛分法等,但任何开挖方法在施工过程中都不可避免地会破坏地下岩层。原始地下岩层处于平衡状态。由于施工、运营等影响,不可避免的影响地下岩土层的连接,导致地下岩土层会失去了原来的平衡,严重的还会导致隧道塌方、滑坡、地下管线破坏、土体(建筑物)倒塌。
1.2地铁附近的建筑物(构筑物)的负荷
地铁交通建设一般位于城市黄金地段或人口密集区,这些区域一般高层建筑较多。这些高层建筑对地表的土壤荷载会导致地铁隧道纵向不均匀的受力。位于饱和软粘土层的隧道段由于岩层的荷载作用,在承受上方荷载时,会出现大面积、长时间的正常下降趋势。 即使在非常低的负载下,隧道下方的土层也会有沉降。
1.3地铁列车振动
地铁运营期间,地铁在隧道内不间断运行。地铁的加速和减速会导致轨道受力不平衡。此外,还应考虑周期性高速运动会引起隧道周围岩土结构的周期性振动。它与地铁本身的周期性振动形成内外共振时,就会造成严重的后果。
1.4隧道区间和车站的沉降
地铁站建设过程中,需要对地基进行处理和压实。 当土体在施工过程中受到扰动时,对其影响不大,整体会比较稳定。但在地铁中心段施工过程中,整个区间的地质层都会存在扰动力,导致车站与隧道之间出现“缝隙”,造成不均匀沉降。同时,还要考虑地铁对地铁下方隧道段的影响。在高度运行时,会增加地铁的载荷,进而影响隧道段的整体变形。
1.5隧道附近基坑的开挖
地铁隧道周围地基开挖对隧道头的结构变形影响很大,主地基开挖深度越大对地铁隧道影响越严重。
当地基向下挖掘时,压实的地基底部的地面有向上的力,使地基底部的地质层向外产生一系列排斥力并在其上跳跃。同时,在开挖地基时,围岩、土、土对地基产生内压,增加了地基底部的水平荷载,使地基底部变大。随着地基深度的增加,开挖深度会越来越深,从而使地基上下两侧的内部高差增大,高差增大引起的荷载也会增加。如果在地铁隧道上挖地基,地基底部的力会导致隧道在垂直方向下沉。如果继续开挖地基,地基越深,受力越大,这将导致地铁隧道内的主体建筑发生严重变形。
原始地质层是为了保持平衡状态,地基的开挖破坏了土壤平衡的状态。随着地基开挖,地基周围原有土体的承载力全部消失,地基周围土体开始对挖出的孔洞产生作用力。随着地基深度的增加,周围土壤对地基的作用力越来越大,向洞口移动的趋势也越来越大。这种倾向会随着挖地基的深度慢慢向四周蔓延,最终导致地基周围的表面积增大,造成地面严重塌陷。
1.6地下水对隧道变形的影响
隧道施工和隧道运营过程中与地下水有着密切的关系。 施工过程中,由于地下水的渗流,在隧道开挖过程中,会有少量地下水流入隧道,对隧道的影响不大,但大量的隧道水对隧道的主要影响较大。地铁隧道在运营过程中,地下水下渗对隧道结构和交通安全造成诸多影响,甚至危及生命财产安全。隧道长期排水会影响地质层中的岩土,表现为软化、分段、润滑、精化、溶解、冻融等。如果情况严重,则隧道内压力过大,最终可能导致隧道坍塌。
2.运营地铁隧道病害整治
2.1病害成因
在列车长期运行振动和周围结构扰动的影响下,地铁盾构隧道在运营期间不可避免地会出现多种病害,影响地下运营的安全性、经济性和耐久性。理论上,地铁盾构隧道的横截面是圆形的,并且在整个运营期的空间位置上保持稳定。但是,由于隧道运营过程中机车运行、环境、地质等基础设施活动的影响,地铁隧道底部的地理位置及其自身的物理形态会有所不同和变化。隧道维护监测就是监测上述偏差和变化的过程。盾构隧道内部变形的常见原因往往与隧道下层地质条件有关。当隧道处于泥质地层时,隧道通常容易下沉,侧向阻力低,造成隧道横截面是椭圆形的。同时,列车的长期循环作用会造成下部土体的累积变形,列车负载导致地面上累积的压力分散。当隧道内出现不均匀缠绕时,盾构隧道管片也容易出现椭变现象。
2.2维保监测的常用方法
运营地铁隧道的运营性质极大地限制了维护监测过程,严重限制了隧道内实际监测的时间窗口和物理测量条件。常用的隧道维护和监测方法有:全站仪测量法,单点测量精度高,但受工作效率限制,只能采用较小的采样密度,容易出现错误和遗漏,需要大量人工成本高,收集效率低。激光隧道剖面可以快速测量隧道断面,但其精度和设计不稳定,无法实现高密度采集。三维激光扫描解决了从隧道内的点云获取数据的问题,但需要按一定距离创建测站,并拆分不同测站的数据,而且存在测量速度慢、点云密度不均、重叠部分数据冗余量大等问题,无法满足地铁运行期天窗监测对运行时间短的需求。移动式三维激光扫描技术操作简单,隧道作业效率高。它不仅解决了传统测量方法对地铁屏蔽隧道监测断面监测信息不全的问题,而且其快速、高效、便捷的测量方法也能满足运营过程中快速监测测量的需要。最重要的测量和分析工作在计算机上进行,因此在地铁盾构隧道的维护和监控方面具有明显的优势。
3.移动三维激光扫描系统
移动式三维激光扫描系统是为轨道交通和维修保养而开发的一种信息化、快速检测设备。该系统在有轨电车上安装高精度、高频率、智能的传感器,采用人工实施方式快速采集轨道及其周边激光点云数据,实现轨道的高精度、快速跟踪。 该系统将激光固定在有轨电车上,从移动平台向目标物体发射高频激光束,传感器接收物体返回的激光信号并检测时间差(相位差),实现目标物体之间的距离。
在隧道内CPIII点上布设标靶装置,提供扫描点云坐标系统,惯性测量单元(IMU)可以实现惯性保持矢量。系统将每次扫描建立从激光到目标反射点的空间矢量,结合激光的仰角和扫描角度信息计算出目标物体相对于激光的三维坐标。
4.基于三维激光扫描技术确定 隧道变形的新方法
4.1一种衡量隧道变形新方法
非固定站控制点,如传统跟踪方式的工作站和清扫点,通过三维激光扫描技术扫描隧道获得的海量点云,不是典型点;其次,每次使用三维激光扫描仪时,驱动器设置位置和扫描方式可能不同,接收的数据量也可能不同。上述问题导致多级跟踪数据变形计算存在问题,无法统一准确比较,限制了激光扫描技术在地铁隧道中的应用效果。因此,提出了一种适用于点云的隧道变形确定方法。该方法的主要过程是建立一个参考系、一个网格、一个点云来实现隧道的状态,去除剖面得到隧道的一部分,并实现隧道的变形值通过比较几个步骤的跟踪数据。
4.2隧道扫描方案
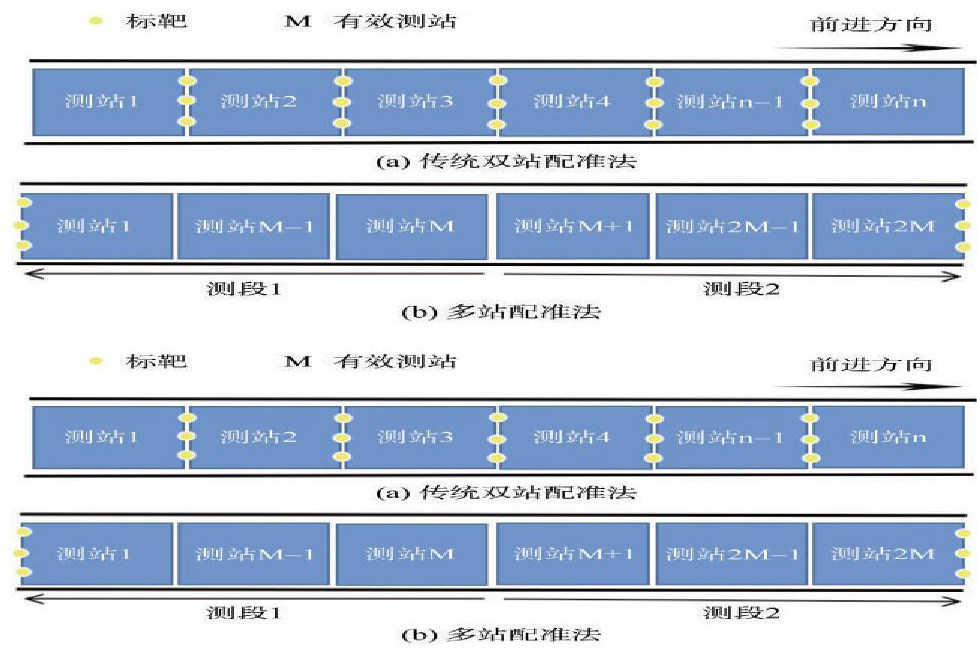
与一般扫描对象相比,地铁隧道具有超长超窄结构。使用扫描仪对隧道进行扫描时,需要获得全面的观测数据,减少设站数量,提高配准精度,合理有效地安排测站。扫描仪性能优良,扫描距离可达数十米。但是,随着距离的增加,扫描密度降低,点云的精度降低。如何确定扫描仪与被扫描身体之间的距离是数据收集的关键。扫描隧道时,站距应根据隧道直径D和扫描的干扰角θ来确定。θ是指激光发射方向与被扫描目标表面法线之间的夹角。干涉角越大,测量误差越大。基于隧道直径通常是固定值,谢雄耀等提出站距S=(1~2)d较好。为获得全面的隧道观测数据,经扫描站扫描的隧道有效距离通常不超过20 m,有一条单向隧道,长度约为1.4 km。在上述最大站点距离之后,必须观察大约 70 个测站。使用传统的车站拼接方法,需要69条坐标信息才能完成配准。其测站配准示意图如图 (a)所示,在插图中,测站1 和测站2 共享一组标靶球,测站 2 和测站 3 共享一组标靶球,依此类推。目标必须放置在每个站点。如果目标是目标盘,则每次都需要进行调平和对齐,并且随着拼接次数的增加,配准误差会增加。地铁隧道变形小,隧道整体收敛沉降仅为毫米级。提高点云的配准精度非常重要。
隧道结构的横截面为沿直线或曲线纵向延伸的标准圆形或椭圆形。在扫描过程中需要沿纵向连续设置测站。根据以上特点,可以设计出适合隧道的设站方法。这种方法的核心是多站连续拼接(配准)法,它利用多测站来划分一组标靶球。多测站拼接法的本质是在能看到且满足扫描仪扫描距离和精度要求的情况下,尽可能拉大两组靶标球之间的架设距离,一定范围内多个测站共享同一组标靶球。贝塞里克等人。经实验证明,目标的扫描误差与200 m以内的扫描距离无关,因此,如果有互视性,可以增加目标与扫描仪的距离。假设扫描仪的扫描目标在200m内不影响扫描精度,假设地铁隧道是笔直的,每次扫描区域对应的隧道长度约为20m,200m内可以得到10个车站考虑为一个有效的测量段并共享同一组标靶球,即扫描仪从1站移动到10站时靶标球不会移动,第10个测量站扫描完成后,将靶标球移动到隧道的另一侧距测站约 200 m 处进行扫描。
与传统方法相比,减少了设置和划分标靶球的次数,提高了记录精度。在实际应用中,可以根据实际情况确定有效测量断面的数量。这种根据隧道实际情况设计的目标布局,提高了检测精度,对于变形值小、监测精度高的隧道变形监测非常有利。多站连续划分法的核心是在满足精度的情况下,增加测量站与目标的距离,减少传输目标的时间,达到不降低点云精度的目的。该方法是一种从数据角度减少配准误差的测站调谐方法。
结束语
采用移动式激光扫描技术对地铁隧道进行扫描,可以一次获得高速、高分辨率、全方位的地铁内表面数据。与传统方法相比,它显示了高效率和高速度的好处。由于隧道表面的点分辨率与仪器中心有关,即距离越大,分辨率越低,固定扫描仪在隧道内的不同断面会出现分辨率不一致的问题,而移动式激光扫描仪系统很好地解决了这个问题。总之,移动扫描技术对运营中的地铁隧道结构分析十分有效,解决了传统方法效率低、劳动强度大、检测周期长等诸多弊端。
参考文献
[1]孙泽会,曾奇,刘德厚,陈鸿,余海忠.三维激光扫描技术在地铁隧道变形监测中的应用[J].铁路技术创新,2019(05):68-72.
[2]邵文,郑佳佳,占晓明.三维激光扫描技术在地铁变形监测中的应用研究[J].科技视界,2019(30):16-17.
[3]董建春.三维激光扫描技术在地铁安全监测中的应用[J].矿山测量,2019,47(05):75-77+81.
[4]胡念念,王蕾.三维激光扫描技术在地铁隧道收敛变形监测中的应用分析[J].建材与装饰,2019(21):245-246.
[5]田辉辉.三维激光扫描技术在地铁隧道变形测量中的应用[J].科学技术创新,2019(20):91-92.

 京公网安备 11011302003690号
京公网安备 11011302003690号


