



- 收藏
- 加入书签

基于重采样PF算法在高铁移动机器人的应用
 打开文本图片集
打开文本图片集
摘要:高铁移动机器人的定位自身位置和姿态是在未知先验高铁轨道巡检复杂环境下的移动机器人自主导航的最为核心技术之一。在很多复杂环境中移动机器人不能利用全局定位系统进行定位,同时,预想事先获取机器人工作环境的地图非常困难。基于传统的粒子滤波的算法存在着粒子退化、处理能力方面难以达到实时要求及计算复杂等问题,通过重采样PF算法后能够有效提高铁移动机器人状态、位置信息估计精度,提高PF算法鲁棒性。
关键词:粒子滤波;Particle Filtering;移动机器人;重采样;PF算法;自主导航
移动机器人的SLAM定位和地图创建(SLAM或Simultaneous localization and mapping)是机器人自主定位与导航研究领域的热点问题。对于已知环境中的机器人自主定位和位置信息地图构建已有了一定的解决方法。针对此问题,我们提出了基于重采样PF算法在高铁移动机器人的应用及其在高铁移动机器人的应用。
一、粒子滤波算法
粒子滤波算法过实现程可简单描述为:初始状态,用x(t)模拟大量粒子计算各种参数值并在空间内均匀分布;预测阶段:通过状态转移方程将得到一个预测粒子;校正阶段,它主要是对预测粒子进行综合评价,越接近于真实状态的粒子说明其的权重就越大;重采样阶段:系统会对粒子权重进行筛选,其筛选原则是既要保留权重大的粒子又要权重小;预测阶段,将重采样后的粒子重新放在状态转移方程计算得到预测迭代时粒子位置的预测值。
二、 粒子算法基本思想
粒子滤波算法是指在状态空间传播中,随机寻找某些样本,通过使用这些样本来近似概率密度函数。
粒子滤波的基本思路是根据先验条件的概率密度函数在状态空间中生成一个粒子集合,将这些所有的粒子权重和加权均值来代替积分运算。通常情况下,针对粒子滤波算法简单来说其实它主要是寻找被追踪目标物体的位置和状态概率密度函数,并且最后得到最小方差分布。它通过预测、更新来源于系统概率密度函数来近似非线性系统的贝叶斯估计的,它适用于非线性系统的估计,对系统噪声是没有限制。
三、重采样
基于蒙特卡洛法的最优贝叶斯估计,其主要思想是根据粒子的权值以及自身位置不断修正调整来不断修正最初的经验分布条件,最后得到最精确的状态估计。重采样的基本实现思想是将大权重的粒子多次进行复制,将权重小的粒子舍弃,然后把采样后的新粒子的权重均设为相等。在粒子采集过程中,p(x0:t|z0:t)往往是未知且多变的,因此可先从一个已知且容易采样的参考分布q(x0:t|z0:t)中抽样,再通过对抽样粒子集进行加权求和来估计系统的状态值,即:
按照式(2.2)可近似为:
其中为的归一化权值,是由q(x0:t|z0:t)采样获得的粒子。
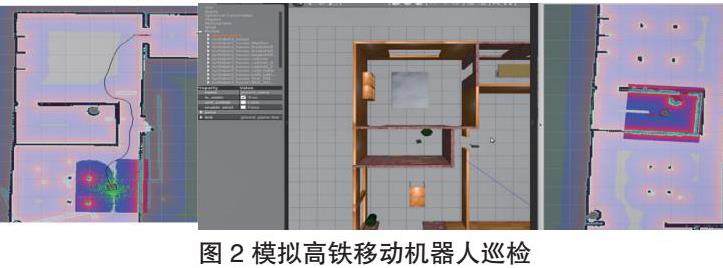
3.移动机器人仿真与实验
为了验证重采样 PF 算法在高铁移动机器人目标跟踪过程中的有效性,本文实验使用roslaunch turtlebot3_gazebo turtlebot3_house.launch完成程序编写和数值实验来仿真验证,电脑硬件环境为GPU为NVIDIA GeForce GTX 1650Ti、CUDA版本为10.1。 对高铁移动机器人目标的随机行走过程及定位估计进行仿真使用2D Nav Goal设定小车目标地点,规划路径,自动运行到目标位置,实现自主导航功能。
四、结论
本文提出了一种基于重采样PF算法对在高铁移动机器人的应用,通过SLAM构建地图实现移动机器人目标跟踪问题的仿真。本研究丰富和完善了粒子滤波算法的应用体系,对高铁移动机器人的跟踪定位研究具有一定的参考依据,拓展了状态估计理论的应用范围,同时对移动机器人方位估计问题具有一定的借鉴价值。
参考文献:
[1]张小俊,徐子寒,杨士鹏.机器人姿态解算算法研究[J].机械设计与制造,2018(06):246-249.
[2]苗泰.基于视频的家居环境中人体摔倒检测算法研究[D].东北电力大学,2021.
[3]张凌晓,刘克成,杨新锋,张军朝.基于改进的粒子滤波非线性约束优化算法[J].计算机应用研究,2014,31(11):3266-3268+3272.
[4]刘红庆,刘燕,伍俊良.基于高斯 Monte Carlo 粒子滤波的机动目标跟踪算法[J].控 制 工 程 ,2018,25(9):1754-1759.
[5]李军.基于粒子滤波方法的说话人跟踪技术研究[D].兰州:兰州理工大学,2015
基金项目: 2021年广州市基础研究计划基础与应用基础研究项目,项目名称:动态场景下基于重采样优化粒子滤波算法及其在高铁移动机器人的应用,项目编号:202102080153;2022年广东省科技创新战略专项资金(大学生科技创新培育项目),项目编号:pdjh2022a0954
作者简介:江跃龙(1984-),男,硕士研究生,人工智能领域、智能信息系统、机器学习、机器视觉。

 京公网安备 11011302003690号
京公网安备 11011302003690号


