



- 收藏
- 加入书签

基于PLC的数控车床与工业机器人上下料系统集成改造研讨
 打开文本图片集
打开文本图片集
摘要:本文从基于PLC的系统集成方案性能不断提升的时代背景入手,对于工业机器人自动上下料运行协调的技术进步与流程控制进行分析与研究。为了在系统生产运行协调中不断满足更高的性能要求,必须更加重视数控系统机床CNC工业机器人自动下料过程要素的分析,本文首先简述了提升工业机器人自动上下料运行协调的重要性,同时分析了现阶段我国PLC可编程逻辑控制器、系统连接中存在的问题,且探究了进一步提升我国工业机器人自动上下料的高性能和质量的策略。
关键词:系统集成;工业机器人日常运行协调;PLC可编程逻辑控制器;自动化生产性能
在我国推进工业现代化、自动化的进程中,数控机床工业机器人自动下料的安全性是非常重要的,为了提升工业机器人功能及其日常运行协调的成效,发挥出系统集成稳定的重要作用,必须充分保障工业机器人自动上下料运行协调的高性能和安全性,加强PLC可编程逻辑控制器的精确性和科学性。
一、现阶段控制数控机床与工业机器人组成集成系统的重要性
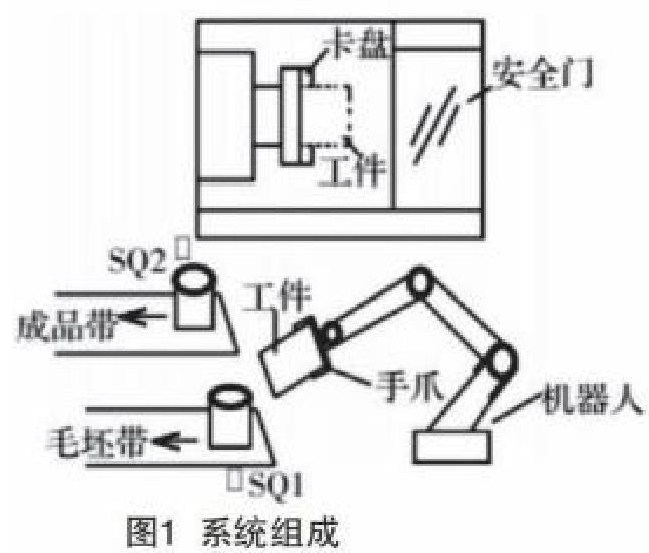
实现机床的自动化生产是现阶段数控机床与工业机器人组成集成系统的重要目的,控制数控机床改造将在很大程度上改变工业生产的模式和人们的生活,为工业现代化发展带来极大的活力,在提升生产效率和生产效益的基础上,通过增强成本管控能力,实现更快速、高效的生产过程,来实现工业生产成本的有效降低。实践中通过结合数控系统和PLC可编程逻辑控制器系统集成,在局部改造数控车床的过程中,实现机床CNC工业机器人自动化下料,达到提高生产效率的目的。我们通过协调局部改造的应用过程,推动系统集成的协调运行,根据实际生产制造情况来调节工作流程与接口信号,以改造系统连接图为手段实现系统的集成改造,注重控制安全门的开关、增加外部感应信号等。数控机床控制改造的过程中应当重视与系统程序相对接,可以使用气动来支撑安全门和卡盘,在防护罩的合适位置科学合理地进行气缸的安装,连接安全门与气缸,删除原来的手动卡盘,替换成新的、合适的气动卡盘。基于PLC的系统集成充分反映了自动化系统集成设计与生产、制造水平,通过系统集成的稳定控制,深入分析数控机床系统的影响因素,采取针对性的措施来控制数控机床与工业机器人组成集成系统,能够有效提高工业生产的效率和质量。[1]
二、数控机床与工业机器人集成系统影响因素分析
(一)基于PLC的系统集成方案设计
基于PLC的系统集成方案设计是否科学合理会在很大程度上影响生产的稳定性和效率,满足实际设计生产过程中的需求,避免各种问题对于系统集成的稳定产生严重的负面影响。[2]为了充分保障系统运行过程的稳定性,必须提升基于PLC的系统集成方案的质量,调整实际的技术方案,现阶段系统生产运行协调中关注度还很不足,如果在数控机床与工业机器人集成自动下料系统不能满足实际的功能要求,导致生产设备运行的安全和性能不能得到完善的保障,将损害工业自动化发展应当具备的质量和性能的目的。
(二)基于PLC逻辑处理输入输出信号
基于PLC逻辑处理输入输出信号是进行系统集成与组成方案设计的重要目的,实践中通过强化输入输出信号的处理、收集、整合的效率,在合适的时间在机器人和数控机床间增加PLC,进而进行系统整合,实现高效率的信号传递与系统协调,强化安全门、卡门和传输带的工作效果,在整体上实现系统集成的有效、协调工作。工作流程规划是PLC应用中必不可少的环节,由于其直接控制安全门、卡盘和传送带,需要合理控制机器人的上下料过程,可以将机器人上下料的过程分为5个简单的动作,严格按照编写的工作流程规划来执行系统工作,被主程序调用。另一个重要因素是PLC可编程逻辑控制器、流程管理之中数控机床机器人自动下料系统存在技术问题,导致实践之中的数控机床机器人自动下料系统未能发挥出应有的效果。[3]
三、数控机床与工业机器人组成集成系统优化的策略
(一)优化机器人自动工作系统
机器人自动工作系统需要依赖于系统程序设计,通过不断优化各部件之间的编程来强化生产全过程的自动化程度,包括装卸料、数控机床运行等。在这个过程中排除人力干扰上下料、加工,以自动化系统来实现节省成本、高效运行,加快信号传递速度,以修改PLC程序、机器人内部的程序来优化整个集成系统,编写PLC程序设计来强化数控机床之间的工作效果,控制调节安全门的开闭、输送带等。数控机床与工业机器人组成集成系统优化需要重视系统连接,严格按照规范来科学合理地制定、调整性能,通过在数控机床工业机器人自动下料系统的全过程中落实生产运行的协调,根据实际情况来进行具体工作的调整,在合理范围内控制工业机器人自动上下料的具体问题,按照运行要求来落实PLC可编程逻辑控制器,加强工业机器人自动上下料设备的故障检修和日常保养,监控设备本身的性能和控制器的安全性,全面提升工业机器人自动上下料的安全性能和使用功能。[4]
(二)重视工业机器人自动上下料、PLC可编程逻辑控制器改进
PLC 技术的应用提升了生产自动化程度和加工质量的稳定性,进而在机加工生产中实现更高的加工精度和重复精度。通过改进基于PLC的系统集成方案,PLC可编程逻辑控制器,控制生产过程中的尺寸偏差,满足系统集成参数的控制要求。只有在PLC可编程逻辑控制器逐步优化的基础上中提升生产技术,才能切实提高工业机器人日常运行协调的技术性、科学性,保障生产的最终质量。工作人员要充分关注数控机床工业机器人自动下料过程的分析,实现更加科学合理的设备功能和工艺流程,结合数控机床工业机器人自动下料的工作原理,合理调整PLC可编程逻辑控制器的设计和处理方式。
四、结语
综上所述,机器人自动工作系统需要依赖于系统程序设计,实践中通过结合数控系统和PLC可编程逻辑控制器系统集成,合理编写PLC程序设计,在局部改造数控机床的过程中,通过CNC机床工业机器人自动下料系统的生产效率和质量。
参考文献
[1]姚永辉.基于PLC的数控机床电气控制系统研究[J].电子测试,2020(6):33-34,54.
[2]丁锦宏.基于PLC的数控车床与工业机器人上下料系统集成改造[J].江苏工程职业技术学院学报,2020(3):1-4.
[3]李荣丽.基于PLC的上下料机器人控制系统设计[J].装备制造技术,2007(2):58-59.
[4]白雪宁.基于PLC的数控机床自动化生产技术研究[J].信息技术,2020(8):74-78.
[5]孟金伟,李红,何青.基于PLC数控车床上下料机器人软件设计[J].电力与能源,2020(3):339-344.

 京公网安备 11011302003690号
京公网安备 11011302003690号


