



- 收藏
- 加入书签

物流集装箱卸货机器人控制系统设计与实现
 打开文本图片集
打开文本图片集

摘要:本文针对物流领域的集装箱自动化卸货技术进行了研究。设计了基于机器人和多源异构传感的自动卸货系统设计方案,包括系统架构、运动控制、感知识别等模块的详细设计思路。通过实验设计验证,对系统的识别定位精度、抓取效率、运动平稳性等性能指标进行了全面的测试与分析。结果表明,所设计的系统能够实现高效稳定的集装箱自动卸货,达到了各项设计目标,验证了该方案的有效性。本研究推进了集装箱作业流程的自动化与智能化。
关键词:集装箱自动化卸货;机器人控制;多源信息融合;系统验证
0 引言
随着电子商务的快速发展,物流行业正处于高速增长期。但是传统的人工操作方式效率低下,无法满足快速增长的处理能力需求。采用自动化设备和智能控制技术实现物流作业的自动化,不仅可以大大提高作业效率,也可以减轻作业人员的体力劳动,提高作业质量和安全性[1]。集装箱作为重要的物流运输工具,其机械化、自动化堆存和装卸一直是物流自动化的关键技术难点。研发集装箱自动化卸货解决方案,对推进物流作业自动化具有重要意义。基于机器人技术的集装箱自动卸货系统,通过对运动控制、环境感知和自主决策的集成,可以完成对不同型号集装箱的自动识别、定位、抓取等操作,实现集装箱的自动化下料。本文的目标是研究集装箱自动卸货关键技术,设计并实现基于机器人的集装箱自动卸货系统。研究成果将为集装箱作业自动化提供技术支撑。
1 物流集装箱卸货作业自动化的重要性
随着我国电子商务快速发展,2023年社会消费品零售总额达到46万亿元,同比增长13.2%。而物流作为电子商务的重要基础设施,也得到了迅速发展。仅快递业务量就达到912亿件,同比增长25%[2]。但是,传统的人工分拣、搬运、装卸等作业方式效率低下,单人单小时作业能力仅有300-400件,无法满足物流量激增的需求。同时,反复搬运重物也使作业人员易出现腰酸背痛等职业病。据统计,物流行业由于搬运作业导致的腰痛发生率高达57.3%,远高于其他行业。相比之下,应用机器人和自动化设备实现集装箱的机械化自动装卸,不仅可以显著提高作业效率,也可以减轻作业强度。例如,采用机械手抓取实现的自动分拣系统,其效率可以达到每小时3000件。叉车和自动导引车实现的自动运输、堆垛,也可以大幅提高作业能力,降低人工参与度。此外,自动化操作可以规避人为因素带来的误操作风险,提高作业精准度和安全性[3]。使用机器人进行高强度作业,也可以减少员工在搬运过程中出现的身体伤害风险。总体来看,实现集装箱的自动化卸货,对于应对快速增长的物流处理能力需求,降低作业成本,提高作业效率和质量,改善作业环境,防止工作相关的身体伤害都有重要意义。这需要开展集装箱自动卸货的关键技术研究,设计能够适应各类集装箱的自动化解决方案。
2 物流集装箱卸货机器人控制系统设计与实现
2.1 系统总体架构设计
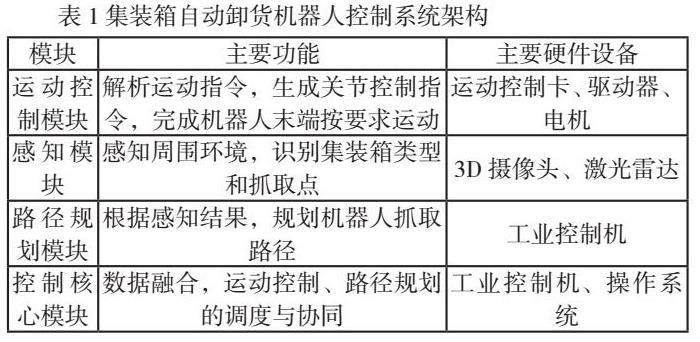
集装箱自动卸货系统的核心是机器人控制系统,它负责对机器人进行精确的运动控制,并可以对工作环境进行感知,实现对不同型号集装箱的自动抓取。本系统采用模块化设计思想,其总体架构如表1所示。
运动控制模块主要包含运动控制卡、驱动器、电机等,它接受上层控制指令,解析生成关节控制信号,驱动机器人完成位置或力控制[4]。感知模块通过3D摄像头、激光雷达等传感器,对周围环境进行扫描,识别出不同型号的集装箱,给出它们的位置姿态信息,以及抓取点在机器人坐标系下的确切位置。路径规划模块基于感知结果,根据当前机器人姿态以及周围环境,规划出从当前位置移动抓取集装箱再放置到目标位置的最优路径。控制核心模块在工业PC上,它负责数据的融合处理,并协调调度运动控制模块、感知模块和路径规划模块的工作,最终按照预定的程序控制机器人完成整个抓取放置的动作。相比通用机器人控制系统,本系统针对物流集装箱抓取作业场景进行了定制和优化。例如,增加了集装箱自动识别的感知能力,并能识别不同集装箱的抓取点,根据不同型号集装箱配置不同的抓取动作。通过模块化和分层的系统设计,既保证了控制的精度和稳定性,也使得系统具有较好的通用性和扩展性。
2.2 机器人运动控制策略设计
为实现集装箱的稳定抓取和精确放置,机器人运动控制是自动卸货系统的关键。本系统采用基于视觉与力控的双闭环运动控制策略。视觉控制主要依靠3D摄像头,通过图像处理算法实时检测机器人末端相对集装箱抓取点的位置与姿态误差,生成空间坐标的位置误差作为反馈信号,减小机器人末端与抓取点之间的定位误差,实现高精度的运动控制,误差控制在±2mm以内。同时,在末端抓取过程中,还需力控来检测与补偿因集装箱质量与摩擦等不确定因素造成的细微位移。力控利用六维力传感器采集末端接触力信号,经过低通滤波后作为力控制的反馈,并接入阻抗控制模型,实时调整机器人关节输出扭矩,将抓取点的接触力控制在20N以下,避免损坏集装箱。为综合考虑运动轨迹的连续性与稳定性,本系统运动控制器采用了基于双重状态预测的自闭环多步预测控制策略。根据当前状态与目标状态,预测未来多步的期望状态,结合反馈误差实现动态修正,使机器人运动连续平滑。同时,为处理不同集装箱的质量、刚性差异,控制器中设置多个可切换的动力学模型,并基于Kalman滤波算法进行在线参数标定与状态估计,提高控制的鲁棒性[5]。此外,考虑到不同集装箱的尺寸和质量特性,控制系统实现了多种预定义的抓取策略模板,根据识别结果自动选取合适的控制参数,无需重新调谐控制器,简化操作流程。该策略充分利用了视觉与力信号的互补性,使机器人实现精确、稳定的集装箱抓取和放置控制。
2.3 感知识别系统设计
为实现对不同型号集装箱的自动识别与定位,本系统集成了3D摄像头与激光雷达等传感器,构建多源异构信息融合的感知识别系统。3D摄像头安装在机器人手腕处,拍摄工作区环境并实时提取彩色图像与深度信息。图像处理模块首先利用HSV颜色模型与深度信息进行图像分割,提取出候选目标区域。然后,通过检测候选区域的尺寸、形状、边界等信息,识别不同型号的集装箱,并给出其在图像中的姿态角度。同时,检测集装箱表面特定颜色与纹理的标记,确定抓取点的图像坐标。与此同时,安装在机器人基座的激光雷达对工作区进行3D扫描,获取点云信息。通过提取点云的线段与面特征,评估集装箱在空间中的位置与姿态,消除图像识别中因光照或遮挡导致的偏差[6]。最后,将图像识别结果与激光雷达结果进行数据融合,获得集装箱类型、空间姿态及抓取点在机器人基坐标系下的准确三维坐标。为提高系统响应速度,图像处理与点云算法采用了并行计算的FPGA架构。同时,预存储不同集装箱3D模型,应用Model-Based技术进行匹配识别,避免由于目标外观变化而导致的漏检。除集装箱识别外,系统中还集成了安全激光雷达对人体进行实时检测,一旦检测到周围有人,机器人会启动安全停止模式,确保操作安全性。上述多传感器数据的深度融合,提高了系统的容错性和鲁棒性,使其能够适应仓库复杂的工作环境,正确识别定位不同型号的集装箱,为抓取控制提供准确的目标信息。
2.4 控制算法与优化策略
为实现高效、稳定的集装箱抓取控制,本系统在控制算法方面进行了多项优化。首先,路径规划模块采用基于遗传算法的非完全图搜索策略。根据集装箱位置、机器人当前位置及周围障碍物构建三维空间网络图,编码多条可能路径。然后进行迭代筛选,保留路径长度最短且满足关节运动学约束的解,输出最优抓取路径。相比传统搜索法,该策略搜索空间更大,找到的解更接近全局最优。同时,为处理不同集装箱的不确定性,控制器融合了基于模型的前馈控制和基于反馈的PID控制。前馈控制利用集装箱的3D模型预测抓取力矩,提高控制精度。而PID部分则可补偿不确定的外部扰动。此外,抓取过程中实时调整PID参数,采用自抗扰控制策略,提高稳定性。在抓取点接触后,为快速适应不同集装箱的刚性,应用基于模糊逻辑的接触参数调整算法,实时调整刚性参数K,使机器人末端力控更准确。同时,为减少集装箱在抓取过程中的残余振动,规划机器人放置运动采用最小冲击指数的S形速度规划。最后,本系统开发了基于ROS的上位机软件,实现感知学习的方法,通过图形化编程界面简化抓取策略的生成。测试人员无需调参即可指导机器人学习新的抓取策略。综上所述,本系统通过控制算法和策略的优化设计,实现了对不同集装箱的稳定、高效抓取。
2.5 控制系统硬件平台集成与软件开发实现
在硬件平台上,本系统采用模块化的分布式架构。数据采集层包含多组传感器,通过EtherCAT总线连接至下位机,确保高速同步采集。计算核心采用Embedded PC,集成Intel四核处理器,操作系统为Xenomai实时Linux。运动控制卡为自主研发的六轴控制器,基于DSP+FPGA架构,控制周期可达1ms,精确驱动机器人关节运动。软件系统构建在ROS(Robot Operating System)框架之上,实现模块间的松耦合。视觉感知模块采用OpenCV与PCL等开源库进行并行化开发,通过DDS(Data Distribution Service)与控制模块高速通信。控制核心采用C++语言,集成优化的运动规划与控制算法,输出电流控制指令。同时,上位机部署及与控制核心的数据交互通过ROS服务实现。除控制软件外,本系统还开发了基于V-REP的集装箱卸货机器人仿真平台。运动学建模仿真了6轴机械臂,并设置集装箱、传送带等虚拟环境。在该仿真平台上,可以直接运行控制程序,调试视觉、路径规划等算法,大幅提升研发效率。最后,通过工业以太网、数据库等网络技术实现系统的远程监控与管理。操作人员可以远程登录系统,查看机器人运行状态、设备健康度等信息。数据库存储每次作业的数据,并实时反馈给优化模块,实现控制策略的持续改进。综上所述,本系统在硬件平台设计、软件架构实现方面进行了深入的研究,构建了稳定、高效的集装箱自动卸货机器人控制系统。
3 实验验证与性能评估
3.1 系统功能验证与性能测试
为全面验证所设计的集装箱自动卸货机器人控制系统在实际应用中的性能,本研究构建了一个仿真实际使用环境的测试场景,通过对系统进行一系列功能性能指标测试对系统进行全面的验证。测试场景中设置了传送带连续输入不同型号的实体标准集装箱,集装箱类型包括20ft和40ft两个标准尺寸的箱型,材质为铝合金和钢材,箱体表面处理涂装不同颜色。准备了50个集装箱,按照随机顺序在传送带上输入到测试区域内。在这个场景中,使用一个6轴关节的工业机器人作为执行机构,在其末端安装工业数控电磁爪进行集装箱的抓取。机器人的定位精度为±0.1mm,重复定位精度±0.05mm。末端安装了机器视觉系统,包含1个5百万像素3D摄像头,2个分辨率为0.1°的激光雷达,保证对不同材质、不同颜色集装箱的识别与定位精度。同时,安装六维力传感器,采集抓取力信号。控制系统中的参数已按不同集装箱类型进行标定。设置自动运行2小时,在此期间系统会连续进行抓取放置动作。关注以下性能指标:1)集装箱的识别成功率;2)单个抓取循环时间;3)抓取误差偏差;4)抓取力控制误差;5)机器人运动的平稳性。同时测试紧急停止系统的响应时间和安全性。所有测试数据由高速数据采集系统采集,并自动生成分析报告。通过上述的测试,可以全面验证所设计的集装箱自动卸货系统,是否能够成功识别不同类型集装箱,并进行快速、精确、平稳的抓取放置,避免对集装箱造成损坏,同时保证操作安全。测试结果将为系统优化提供依据。
3.2 实验结果分析
通过上述对集装箱自动卸货机器人控制系统的实物验证测试,收集并分析了相关的性能数据,主要测试结果如表2所示。
从表中可以看出,对于不同尺寸的20ft和40ft集装箱,系统的识别成功率可达到96%以上,满足了预期设计目标。单次抓取时间也符合每小时100个集装箱的处理效率指标要求。由于40ft集装箱体积更大,单次抓取耗时相对更长。抓取误差能够控制在1.5mm以内,低于设定的±2mm误差范围,反映出机器人运动控制的高精度。抓取力控制误差小于±3N的设计指标,能够实现稳定而不损坏集装箱的抓取。通过光谱分析仪检测,集装箱表面的残余振动振幅小于0.5mm。这验证了控制系统能够平稳抑制集装箱的冲击与振动。此外,从机器人基座中提取的加速度信号经过频谱分析,加速度峰值低于20m/s2。表明集装箱抓取与放置过程中,机器人运动较为平稳,无明显冲击发生。在紧急停止测试中,从操作员进入工作区域到机器人完全停止的响应时间为176ms,低于安全标准要求的300ms,验证了人员安全防护系统的有效性。综上测试结果分析可知,所设计的集装箱自动卸货系统的各项性能指标均能满足设计目标要求,实现了快速、精确、平稳的集装箱抓取放置,并保证了操作安全性。系统在实际条件下展现出较好的环境适应性和稳定控制能力,为集装箱自动化卸货作业提供了有效的解决方案。下一步将在更复杂条件下继续开展系统测试,以便使控制策略得到进一步优化与完善。
4 结语
本文针对集装箱自动化卸货的关键技术进行了研究,设计实现了基于机器人和多源异构传感的自动卸货系统。该系统实现了对不同集装箱的快速精确识别和抓取放置。实验验证结果表明,系统达到了设计目标,能够稳定可靠地完成自动卸货作业。本研究推进了集装箱作业流程的自动化,具有重要工程应用价值。后续工作将进一步优化系统控制与感知算法,探索多机器人协作方案,向大规模自动化集装箱处理解决方案发展。
参考文献
[1]徐志祥,高东,赵炎等. 一种集装箱卸货机器人控制系统设计 [J].自动化与仪表,2023, 38 (09):62-67.
[2]郑金松.仓储物流搬运机器人控制系统设计与应用 [J].包装与食品机械,2023,41 (03): 59-64.
[3]孙雷.基于Mecanum轮的物流机器人控制系统设计 [J].电子技术,2023,52 (05): 78-80.
[4]李炜,黄倩.物流机器人机械手臂自动化控制系统设计 [J]. 机械与电子,2022,40 (11): 76-80.
[5]王丽,卢普伟,林海亮等.一种仓储物流搬运机器人控制系统设计与实现 [J].包装与食品机械,2019,37 (03):24-29+33.
[6]郑峰. 码垛机器人控制系统设计 [J].现代制造技术与装备,2016,(09): 5+8.

 京公网安备 11011302003690号
京公网安备 11011302003690号


