



- 收藏
- 加入书签

基于EMB系统的纯电动汽车再生制动与防抱死系统协调控制研究综述
 打开文本图片集
打开文本图片集
摘要:纯电动汽车复合制动由电机再生制动与机械摩擦制动两部分构成,其控制性能直接影响车辆的能量利用效率、制动安全性以及舒适性,并且随着电动汽车智能化和网联化发展,复合制动控制与驾驶人辅助系统相结合有助于在保证系统功能的同时实现能量回收效益最大化。本文从三个方面的研究现状与关键技术开展综述,并对复合制动控制未来研究方向进行了展望。
关键词:电动汽车;再生制动;防抱死系统;电子机械制动系统
引言
面对严峻的环境和能源问题,汽车行业正在经历由传统汽车向新能源汽车的转型。相关研究表明,汽车约1/3~1/2的行驶能量是在制动过程中消耗的。因此,可再生制动技术对新能源汽车的节能减排有重要的影响。再生制动也称反馈制动,在制动时把车辆的动能转化为电能,储存于蓄电池中。汽车制动能量回收的目的在于提高能源利用率,回收后的制动能量可作为驱动能量,大大提高了新能源汽车的续驶里程。尤其在城市工况中,车辆需要频繁地制动起步,其中消耗的能量占汽车产生的总驱动能量的50%。再生制动技术可提高电动汽车能量的循环利用,在改善混合动力汽车能源利用方面有着巨大潜力。随着科技发展制动系统从最早的机械制动过渡到传统的液压制动,再到现如今广受欢迎的线控制动(Brake-by-wire, BBW)。对于纯电动汽车,为保证能量回收过程中的制动稳定性以及能量回收高效性,确定再生制动能量回收和防抱死系统协调控制策略是制动能量回收系统发展中不可忽视的问题。本文对电子机械制动系统(EMB)的控制以及再生制动、防抱死系统协调控制策略研究等三个方面进行回顾和分析。
1.电子机械制动系统
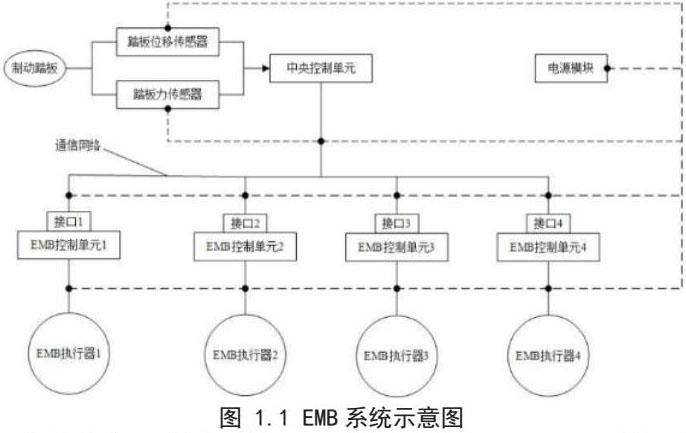
电子机械制动系统(EMB) 摒除了传统液压制动系统中液压源的使用,车轮所受制动力矩全部由电机经中间机构传递到制动执行器去实现的,其相关结构形式如 图 1.1 所示。由于在结构、布局、信号传递等方面都与传统制动存在本质区别,EMB 系统的执行、控制等方面都需要重新设计。与传统制动系统相比,EMB 系统由于无冗余备份,这也是如今制约EMB系统量产化和实车化的主要阻碍。
图 1.1 EMB系统示意图
与传统液压系统相比较,EMB系统的优点为:(1) EMB 系统用电驱动元件替代传统液压制动装置,从而使汽车系统结构布置更为方便、合理,在削减整备质量的同时也降低了油耗。(2) EMB 系统以电信号作为信息传播介质,取消了所有制动管路和液压油的使用, 加快了系统响应速度,明显缩短了制动系统反应时间。(3) EMB 系统用电机取代液压泵来完成制动器的相关驱动操作,不但可以实现对制动力的精确稳定控制,还可以减小对环境的污染程度。(4) EMB 系统便于集成其他主动安全控制系统,例如:ABS、TCS、ESP 等。
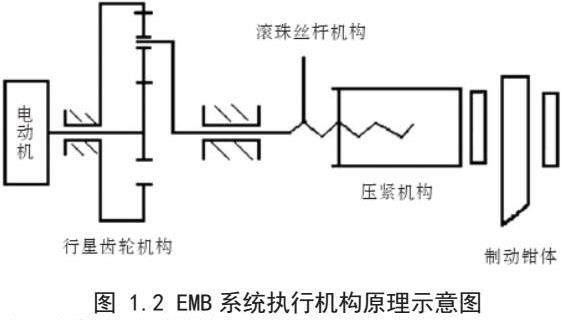
EMB系统主要由电动机、减速增力机构、运动转换机构3个部分组成,如图1.2所示。选择无刷直流电动机,减速增力机构选择行星齿轮,运动转换机构选择滚珠丝杆,该滚珠丝杆为螺旋机构,可将旋转运动转换为直线运动并产生压紧力,从而使摩擦片压紧制动盘。
2.电子机械制动系统控制研究
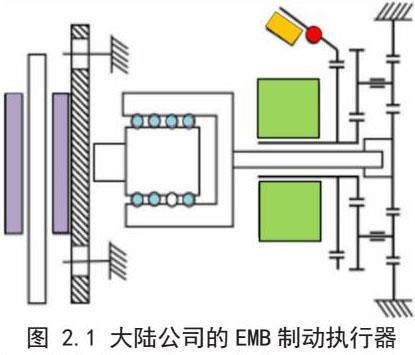
上世纪 90 年代初期,一些著名的国外汽车制造企业和相关零部件厂商就展开了对 EMB 执行器的研发工作。大陆集团研制的EMB执行器如图 2.1所示,其采用行星齿轮减速机构与滚珠丝杠 副相集成的方式。该类型执行器在进行制动时,电机通电旋转,经行星齿轮机构实现减速增矩的作用,然后借助于滚珠丝杠副将最初的电机转动变为最终的螺母平动,推动制动衬片压向制动盘,完成制动操作。
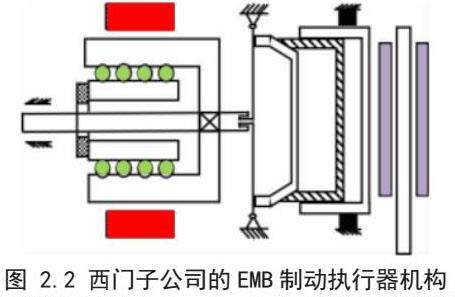
Siemens公司独辟蹊径,在近几年内研制出了一种形状巧妙、结构独特的 EMB 执行器机构,结构如图 2.2所示。该 EMB 执行器利用丝杠部分将电机的转动变为最终的平动,并将增力杠杆设置在制动钳块和螺母之间,用于增大滚珠丝杠的输出压力。另外, 为了进一步优化整体结构,该执行器将减速增矩机构用增力杠杆去替换。
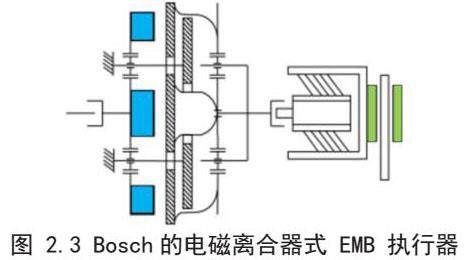
作为制动方面的明星企业,Bosch公司通过不断尝试后,研制出了一款如图 2.3 所示的新型 EMB 制动器。该机构除了具备电动机、行星齿轮系、滚珠丝杠等常规组成部件外,还结合了两组电磁离合器。在工作时,当离合器结合时电动机输出力矩,施加制动力;当离合器分离时电动机停止工作,由离合器维持制动力矩。这种方式的执行机构便于在汽车上布置,空间占用率低,因此具有很强的通用性。
现阶段对 EMB 控制算法的研究主要集中在:精确输出所需制动夹紧力、提升制动系统反应速度、相关临界点识别等。 Chris Line[1]等人在对 EMB 研发过程中,意识到EMB系统工作时的重要节点是较为精准的控制制动夹紧力的输出。为了验证相关假设,搭建了EMB系统的数学模型,在采用串联闭环控制的基础上,提出了基EMB系统的,制动夹紧力为最外环的 PI控制策略。结果显示,当期望制动夹紧力较大幅度的发生变动时,所提策略对其具有较好的跟随性,反之亦然。Chihoon Jo[2]等人在对EMB控制算法研究过程中,将该执行机构中各部件间的摩擦特征考虑在内,并提出了一种新颖的夹紧力估计算法,该算法较好地利用了驱动电机转角与实际制动夹紧力二者所建立的关联。结果显示,所提策略能较为精准、有效的对夹紧力进行预估。Young-Hun Ki [3]等人提出了一种通过参考电机磁滞特性和转子位置,对制动器制动夹紧力进行估算的方法,并且利用力-位移控制系统实现对制动间隙的调整。Heeram Park[4]等人在对 EMB系统研究过程中发现,系统相关参数的细微改变都能引起整个EMB系统剧烈变化,并且在 EMB 系统工作过程中很难去测量实时的制动夹紧力。基于上述问题,Heeram Park等人提出了一种新型的自适应控制算法,该算法在不借助外界传感器的情况下也能显著提高对制动夹紧力的跟踪性。
国内对 EMB 控制算法的研究起步较晚,目前仍处于研发初级阶段,相关研究主要集中在EMB力学性能、EMB 结构优化、EMB 辅助控制系统等方面。湖南大学的张睿[5]搭建了一种基于EMB 系统的间隙可调控制算法,该算法将电流值作为目标控制量,并通过相应的滤波算法对该值进行处理以提升识别的精准性,在此基础上提出了添加模糊控制项的制动夹紧力 PID 控制算法。结果显示,相较于常规 PID 算法,该算法在鲁棒性和动态性方面都得到了进一步提升。东北大学的周淑文、 陈庆明[6]等在对集成 ABS 功能的 EMB系统研究过程中,提出了以车轮滑移率为目标函数的基于EMB系统的ABS滑模控制算法,通过 Carsim 构建出整车模型,进一步验证了相关控制策略在整车控制系统上的可行性。总体来说,国内对EMB的研究大多处于理论阶段,距离实车实验还有一定距离。
3.再生制动与防抱死系统协同分析
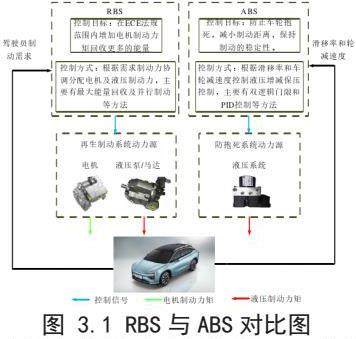
随着智能汽车的发展,对车辆的制动系统的要求越来越高。在我国冰雪雨多的城市,路面附着系数较低,触发ABS后,一般会快速退出再生制动力,仅由液压制动系统实现防抱死控制,但是这样的情况会导致制动能量的损失且稳定性差;但不退出再生制动力的话,由于再生制动系统(RBS)与防抱死系统的控制方式与作用方式不同,两系统互相独立,会导致再生制动系统与防抱死控制系统相干涉,导致防抱死系统失效,从而影响汽车制动的稳定性(图3.1所示)。因此对再生制动与ABS进行协调控制尤为重要。
国内外研究人员与机构针对再生制动与ABS协调控制这一关键性问题做了大量的研究,这是提高混合动力汽车制动能量回收以及制动稳定性的必经之路,也是更好的发展纯电动汽车的必要环节。例如Yimin Gao、Mehrdad Ehsani等学者提出了三种制动力分配策略,并且在触发ABS时,车轮即将抱死,提出了一种避免液压系统与电机再生制动系统互相干涉的主动协调调节算法。Tehranil.MM[7]等学者提出依据滑移率的大小对再生制动与防抱死系统的协调控制分成滑移率小于15%、滑移率大于15%小于20%以及滑移率大于20%三类情况讨论,该集成控制器在滑移率小于15%时,采取常规制动方式;大于20%时,退出电机再生制动力,利用传统液压ABS进行防抱死;介于15%~20%之间时,进行协调控制。清华大学的张雷[8]等人对不同路面进行了低、中以及高附着系数的分类,并且针对每一种路面情况,提出对应的协调控制策略。当ABS触发在低附着系数路面上时,此时传统液压制动力提供基础制动力,电机再生制动力进行ABS调节;当ABS触发在中附着系数路面上时,此时电机再生制动力作为基础,传统液压制动系统作为ABS的调节系统;当在高附着系数路面上时,电机再生制动力逐步退出ABS防抱死制动过程,只由传统液压ABS进行防抱死调节。但是并没有对当前路面进行准确识别,只是粗略带过。上海交通大学的彭栋[9]等人提出一种将制动过程中的轮胎滑移率作为集成控制器的目标控制变量的控制策略,基于此提出了模糊控制算法以及逻辑门限值控制算法。主要思想是触发ABS后逐渐退出电机再生制动力,但是对于如何退出,文中并没有详细指出;另外对于模糊控制算法来说,其没有考虑两种制动系统的响应速度以及切换过程中可能存在的问题。
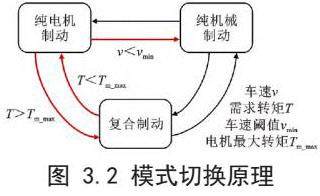
复合制动系统工作时,可以分为纯电机制动、纯机械制动以及复合制动3种模式[10]。电动汽车在日常行驶过程中,随着行驶工况与车辆状态的变化,主要存在以下3种制动模式切换过程:①随着制动转矩需求增大,再生制动无法满足时,由纯电机制动模式切换至复合制动模式;②随着制动转矩需求减小,由复合制动模式切换至纯电机制动模式;③随着车速降低,电机无法提供再生制动转矩,由纯电机制动模式切换至纯机械制动模式,如图3.2所示。
4 总结
本文面向电动汽车复合制动控制,从三个方面对近年来相关研究进行了归纳总结。目前在再生制动与防抱死系统之间的协调控制的制动器大多采用液压制动或者是电子液压制动,基于电子机械制动的再生制动与防抱死系统研究还需进一步开展。
参考文献:(References)
[1]Chris Line, Chris Manzie, Malcolm Good. Control of an Electromechanical Brake for Automotive Brake-By-Wire Systems with an Adapted Motion Control Architecture[J]. Automotive Dynamics, Stability& Controls Conference and Exhibition, 2004(05): 45-48
[2]Chihoon Jo, Sungho Hwang, and Hyunsoo Kim. Clamping-Force Control for Electromechanical Brake[J]. Transactions on Vehicular Technology, 2010, 59(7):3205-3212
[3]Ki Y.H., Lee K.J. Chen J.S., et al. Design and Implementation of a New Clamping Force Estimator in Electro-Mechanical Brake Systems[J]. International Journal of Automotive Technology, 2013,14(5): 739-745
[4]Heeram Park, Seibum B.Choi. Development of a Sensorless Control Method for a Self-Energizing Brake System Using Noncircular Gears[J]. IEEE Transactions on Control Systems Technology, 2013,21(4): 1328-1339
[5]张睿. EMB 夹紧力控制策略研究及实验平台的开发[D]. 长沙: 湖南大学, 2018
[6]周淑文, 陈庆明, 孙大明. 基于 EMB 系统的整车 ABS 滑模变结构控制[J]. 东北大学学报(自然 科学版), 2016(7): 994-997
[7]Tehranil MM, Hairi MR. Design of an Anti-Lock Regenerative Braking System for a Series Hybrid Electric Vehicle[J].International Journal of Automotive Engineering,2011,1(2):14-27.
[8]张雷,于良耀,宋健,张永生,魏文若.电动汽车再生制动与液压制动防抱协调控制[J].清华大学学报(自然科学版),2016,56(02):152-159.
[9]彭栋. 混合动力汽车制动能量回收与ABS集成控制研究[D].上海交通大学,2007.
[10]高会恩.电动轿车制动能量回收与防抱死集成控制系统研究[D].吉林大学,2020.
作者简介:潘芳(1975.5-),女,汉,籍贯:江苏镇江,工作单位:江苏大学汽车摩托车研究所有限公司,研究方向:汽车零部件测试技术

 京公网安备 11011302003690号
京公网安备 11011302003690号


