



- 收藏
- 加入书签

城市轨道交通牵引逆变器主电路研究
 打开文本图片集
打开文本图片集
摘要:牵引系统是地铁列车的动力源,关乎到地铁列车的正常运营和乘坐的舒适性。同时也是地铁列车中最复杂的系统之一。牵引逆变器作为牵引系统的重要功率部件,其主电路涉及到复杂的整流和逆变理论。本文从地铁列车牵引逆变器的实际工况出发,深入剖析了牵引逆变器主电路的工作方式和理论基础。重点阐述了牵引逆变器四象限工况、恒转矩调速、恒功率调速、以及牵引逆变器的一般数学模型。
关键词:牵引逆变器、恒转矩调速、恒功率调速、一般数学模型、整流器、逆变器
1.前言
城市轨道交通的多采用直流供电方式,供电电压为DC1500V或DC750V。主要为接触网或第三轨方式受电。对于4动2拖的6节编组的地铁列车,列车两端的车辆为拖车,动车处于中间位置。这样布置能够保证动车具有良好的轮轨粘着系数,降低车轮打滑的概率,进一步保障列车平稳安全运行,提高乘坐舒适性。所谓动车即自身具有动力的地铁车辆,拖车即自身不带有动力的地铁车辆。动车的2个转向架共配置4台牵引电机,由动车上的牵引逆变器驱动。
2.牵引逆变器工况
地铁列车在运行过程中,具有向前加速、向前减速、向后加速、向后减速四种牵引工况。牵引电机需要实现四象限工作状态,即正转电动状态、正转再生制动状态、反转电动状态、反转再生制动状态,才能满足地铁运行要求。以牵引电机的转速为纵向坐标轴,以牵引电机的转矩为横坐标轴,建立直角坐标系,表述牵引电动机的四种工作状态。这四种工作状态为牵引电机的四象限工作状态。每一种状态的机械特性曲线分别在直角坐标系的四个象限。
四个象限定义如下:第一象限,牵引电机正转加速状态,牵引电机的转速及转矩都为正,电能从牵引逆变器到牵引电机,牵引逆变器输出的电压和电流方向为正;第二象限,牵引电机正转,再生制动减速运转状态,牵引电机以发电机模式工作,牵引电机转速为正,转矩为负,电能从牵引电机到牵引逆变器,牵引逆变器输出电压为正,输出电流为负;第三象限,牵引电机反向加速,电机的转速及转矩都为负,电能从逆变器到电机,逆变器输出的电压和电流方向为负。第四象限,牵引电机反转,再生制动减速运转,电机以发电机模式工作,转速为负,转矩为正,电能从电机到逆变器,逆变器输出电压为负,输出电流为正【1】。
牵引逆变器能够使电机工作在四个象限,实现电能的双向流通,在不需要外加任何装置的情况下,可以把再生能量回馈到电网,达到节能运行效果。
牵引电机四象限工况
转差率、同步转速和异步电动机转子转速三者之间的关系,是实现电动机四象限工作的重要参数。
根据异步电动机的特性,当,且时,电机处于电动机运行状态,电磁转矩与转子方向相同。在电机启动瞬间,转差率。当,且时,气隙旋转磁场与转子运行方向一致,电磁转矩为负,为正,电机处于再生制动运行状态(异步发电状态)。电动机的运行方向由电动机中定子电流相序控制。
由异步电动机电磁转矩参数表达式可知,当电压和频率一定时,电机参数固定不变,电磁转矩是转差率的函数【2】。
式中: ——电磁转矩;
——定子绕组相电压;
——定子绕组相数;
——定子绕组电阻;
——定子绕组电抗;
——折算后转子绕组电阻;
——折算后转子绕组的漏电抗。
在地铁牵引系统中牵引逆变器又称为VVVF(Variable Voltage and Variable Frequency)逆变器。在地铁列车在运行过程中,由于乘客上下车使得载客量发生变化,导致列车总质量变动。牵引电机在相同的速度和加速度下,输出的转矩不同。交流电机变频调速主要包括恒转矩调速和恒功率调速两种调速方式【3】。为提高乘坐舒适性和经济性,地铁列车在低速时,采用恒转矩调速,在列车速度达到约36km/h时,转为恒功率调速方式。
恒转矩调速
式中:——定子绕组相电动式;
——定子每相绕组串联匝数;
——电动机主磁通幅值。
电源电压一定时,若频率降低,则主磁通幅值增加,将导致主磁路过饱和,使励磁电流突变。为防止励磁电流突变,在调整电压频率时,应同时降低电源电压。
由于异步电动机在正常运行时,转差率数值很小,因此电磁转矩公式可简化为
在改变电源频率的同时,调整电动机的电源电压,并且根据当前转速,使为常数,则可实现恒转矩调速。但在频率较低时,影响较大,需要进行电压补偿。
恒功率调速
当电机输入电压达到额定电压时,电机的输入电压无法提高,电机转入哼功率控制方式。在改变电源频率时,电源电压不变,使为常数,可实现电机的恒功率调速。此时电机的输出转矩降低,类似于弱磁调速。
3.牵引系统主电路
地铁列车受电弓与DC1500V接触网接触受电,高压母线经过高速断路器后,再连接到牵引逆变器线路接触器和预充电接触器。在牵引逆变器的直流母线设计有滤波电抗器,与母线的支撑电容构成LC低通滤波电路,滤除直流母线上的高次谐波。在发生过流故障时,高速断路器迅速断开故障逆变器电源。牵引逆变器为两电平电压PWM逆变器,设计有预充电和支撑电容放电电路,以及由斩波IGBT、制动电阻和续流二极管组成的直流母线降压电路。直流母线电压传感器、交流输出电流传感器实时采集电压、电流,用于SVPWM闭环控制,母线电流传感器检测正负母线电流。再生制动时,牵引逆变器将列车的动能转变为电能,反馈给接触网。当接触网无法吸收再生制动的电能时,逆变器通过制动电阻,将多余的电能转变为热能,消散到列车周围的空气中。
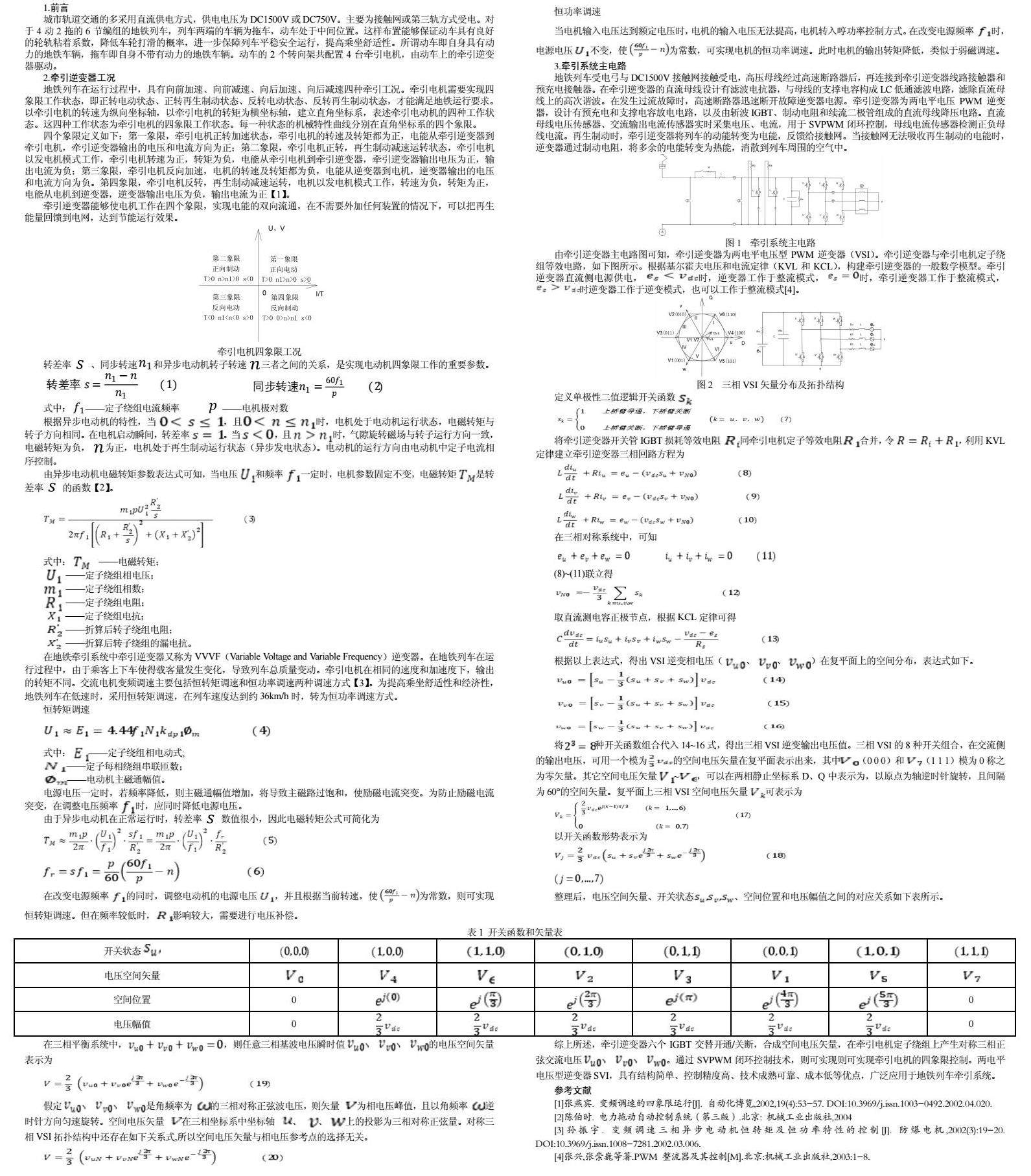
由牵引逆变器主电路图可知,牵引逆变器为两电平电压型PWM逆变器(VSI)。牵引逆变器与牵引电机定子绕组等效电路,如下图所示。根据基尔霍夫电压和电流定律(KVL和KCL),构建牵引逆变器的一般数学模型。牵引逆变器直流侧电源供电,时,逆变器工作于整流模式,时,牵引逆变器工作于整流模式,时逆变器工作于逆变模式,也可以工作于整流模式[4]。
假定是角频率为的三相对称正弦波电压,则矢量为相电压峰值,且以角频率逆时针方向匀速旋转。空间电压矢量在三相坐标系中坐标轴、、上的投影为三相对称正弦量。对称三相VSI拓扑结构中还存在如下关系式,所以空间电压矢量与相电压参考点的选择无关。
综上所述,牵引逆变器六个IGBT交替开通/关断,合成空间电压矢量,在牵引电机定子绕组上产生对称三相正弦交流电压。通过SVPWM闭环控制技术,则可实现则可实现牵引电机的四象限控制。两电平电压型逆变器SVI,具有结构简单、控制精度高、技术成熟可靠、成本低等优点,广泛应用于地铁列车牵引系统。
参考文献
[1]张燕宾. 变频调速的四象限运行[J]. 自动化博览,2002,19(4):53-57. DOI:10.3969/j.issn.1003-0492.2002.04.020.
[2]陈伯时. 电力拖动自动控制系统(第三版).北京: 机械工业出版社,2004
[3]孙振宇. 变频调速三相异步电动机恒转矩及恒功率特性的控制[J]. 防爆电机,2002(3):19-20. DOI:10.3969/j.issn.1008-7281.2002.03.006.
[4]张兴,张崇巍等著.PWM 整流器及其控制[M].北京:机械工业出版社,2003:1-8.

 京公网安备 11011302003690号
京公网安备 11011302003690号


