



- 收藏
- 加入书签

高效冲模自动取料装置的结构改进与性能提升
 打开文本图片集
打开文本图片集
摘要:本研究的目的是提高电机铁芯加工中自动取料冲模装置的效率与性能。分析现有供料装置不足,提出自动供料新装置。该装置包括通过优化各部件的结构和工作原理,增强装置稳定性和精确性的取料固定板、滑轨和滑块、支撑板和通孔设计。实验阶段,通过一系列的性能测试,评估了设备的供料速度、精度和自动化水平。研究表明,该装置具有显著的优势,可以提高生产效率,减少劳动力介入,降低生产成本。该研究为自动化设备研发提供了新思路,也为电机铁芯加工领域提供了借鉴。
关键词:冲模自动取料装置;结构改进;性能提升;电机铁芯加工
引言
传统的取料方式在电机铁芯加工过程中,效率不高,容易出现人为误差,不能满足高效需求的现代化生产。生产效率和产品质量的提高,自动化取料装置的研发意义重大。该研究设计了一种新型高效冲模自动取料装置,旨在通过结构优化和性能提升实现取料过程的自动化和精确化,以解决现有取料装置的不足。本文将对该装置的结构设计、工作原理、性能测试结果等方面进行详细介绍,并对其在实际生产中的应用前景进行深入探讨。
1.冲模自动取料装置的结构设计
1.1取料固定板
进料固定板是与整个装置的稳定性和进料精度直接相关的冲模自动进料装置的核心部件之一。固定板采用耐磨性好、耐冲击的高强度合金材料.在高速度、高频率的工作环境下,固定板的稳定性可以得到很好的发挥。固定板表面经过精密加工,以提高取料的精准度,保证其平整光滑,使其与物料部件接触时,摩擦阻力和损耗降到最低。在固定板上设置多个孔洞,用于其他部件如滑轨等的安装和支撑板的安装。为了保证装置内固定板的合理布局和各部件的紧密配合,这些孔洞的尺寸和位置都经过了精密的计算和反复的测试。取料固定板还针对不同规格和形状的料件,设计了可灵活调整和固定的可调夹具和固定装置,使装置的通用性和适应性得到了提高。固定板的整体设计在提高设备采料效率及稳定性的同时,也方便了安装及调试后续部件。
1.2滑轨与滑块
滑轨和滑块系统是一个重要的组成部分,它可以自动化、精确化地取料。滑轨具有良好的耐腐蚀性和耐磨性,可在复杂的工作环境中长时间使用,采用高强度不锈钢材料制作而成。滑轨的设计兼顾了滑块的运动轨迹和载重要求,表面经过精密的加工和热处理,保证了滑块在滑轨上的平稳运动和高精度的定位,在设计时,滑轨上的滚珠或滑动轴承设置在滑块的内部,使摩擦阻力减小,稳定性和运动的精确性也得到提高。在滑块上安装驱动机构,通过控制滑块水平运动的电动机或气动装置,实现自动取料过程[1]。滑块的驱动机构设计灵活,在满足各种工况下取料需求的情况下,可根据不同的取料要求进行调整。滑轨与滑块系统还设有可实时监控滑块位置及运动状态的感应器及侦测装置,确保取料过程安全及效率。这种带有滑块的滑轨设计,在提高取料精度和速度的同时,也使装置的自动化程度和可靠性大大增强。
1.3支撑板与通孔设计
整个冲模自动取料装置,支撑板和通孔的设计起着至关重要的作用。采用高强度合金材料制成的支撑板,在取料过程中的承重和抗变形能力都非常出色,可以提供可靠的支撑性。支撑板的结构设计考虑了物料部件的重量和形状,为了减少物料部件在运动过程中的摩擦阻力和磨损,表面经过精细的加工和处理,保证了平整度和流畅度。通过螺栓和销钉将支撑板固定在滑块上,在运动过程中保证了支撑板的稳定可靠。孔洞的设计是根据设备的整体布局和功能需求,经过反复计算和测试孔洞的数量、大小和位置,从而保证各部件之间的紧密协作和高效运作,从而进行精密的布局和设计。孔洞不仅用来固定和连接每一个部件,还可以方便安装和调试传感器、驱动机构等。孔洞布局合理,加工精密,使机组整体稳定性得到提高,运行效率得到提高。支撑板及通孔设计亦兼顾装置的保养与维护,为装置长时间使用后的保养与维护提供方便的拆装与调整方式,确保其方便快捷。
2.工作原理与控制系统
2.1驱动系统设计
驱动系统是冲模自动取料装置的关键部分,直接影响到其工作效率和精度。系统选用了高性能的伺服电机作为驱动件一,具有高响应速度、高控制精度和良好的运行稳定性,能够满足装置高频率和高精度的取料需求[2]。伺服电机的功率和扭矩计算如下:
如装置的取料负载为20kg,滑块的最大移动速度为0.5m/s,加速度为1m/s²。根据动力学公式: ,计算出需要的驱动力: ,滑块的移动速度为0.5m/s,假设滑块与丝杠的传动效率为80%,伺服电机的输出功率 计算如下:
为了确保驱动系统的可靠性,实际选用的伺服电机功率应为计算功率的1.5倍,即选用功率为20W的伺服电机。伺服电机的额定扭矩需满足丝杠传动的扭矩要求。假设丝杠螺距为5mm,滑块的最大移动速度为0.5m/s,对应丝杠转速为:
根据功率与扭矩的关系 ,其中 为角速度,计算出伺服电机的扭矩:
实际选用扭矩为0.05Nm的伺服电机,能够满足系统的扭矩要求。
驱动系统的控制策略采用闭环控制,通过编码器实时反馈滑块的位置和速度,PLC(可编程逻辑控制器)根据设定的控制程序和反馈信号,调节伺服电机的转速和位置,实现精确的运动控制。控制系统包括伺服驱动器、编码器和PLC,编码器将滑块的实际位置反馈给PLC,PLC根据预设的轨迹和速度进行计算,输出控制信号给伺服驱动器,驱动伺服电机按设定的轨迹和速度运行。
驱动系统与其他组件的协调工作是实现整个装置高效运行的关键。滑轨与滑块系统通过双导轨结构确保滑块的平稳运动,支撑板和通孔设计为滑块和取料固定板提供了可靠的支撑和安装基础。控制系统实时监控驱动系统的运行状态,通过传感器反馈滑块和料件的位置,确保取料过程的高精度和高效率。
通过对驱动件一的选型、动力计算、控制策略的设计以及驱动系统与其他组件的协调工作,整个驱动系统在取料过程中表现出高效、稳定和精确的特点,为冲模自动取料装置的高效运行提供了坚实的技术保障
2.2控制系统设计
控制系统是冲模自动取料装置的“大脑”,硬件构成包括PLC(可编程逻辑控制器)、HMI(人机界面)、传感器、伺服驱动器和执行器等。PLC作为核心控制单元,负责接收传感器的信号、处理数据并发送控制指令。HMI提供了用户与系统交互的界面,方便操作人员进行参数设置、状态监控和故障排查。伺服驱动器负责驱动伺服电机,根据PLC的控制指令精确控制电机的转速和位置。传感器用于监测装置各部件的状态。执行器则根据PLC的指令执行相应的操作。控制系统的软件架构采用模块化设计,分为数据采集模块、数据处理模块、控制指令模块和人机交互模块[3]。
控制系统的传感器布局合理且精确,滑块位置由高精度编码器监测,实时反馈滑块的位移和速度数据。料件的状态由光电传感器监测,确保取料过程中的位置和状态精度。温度和湿度传感器用于监测环境参数,确保系统在最佳条件下运行。所有传感器信号通过A/D转换器转换为数字信号,传输到PLC进行处理。信号处理采用数字滤波和去噪算法,确保数据的准确性和稳定性。
控制系统的实时监控与故障诊断功能十分强大,通过PLC与HMI的配合,实现对系统运行状态的实时监控,对各传感器的数据进行实时采集,对系统的运行状态进行判断,当出现异常情况时,PLC会立即发出报警信号,在HMI上显示故障信息及处理建议,系统还具有自诊断功能,可自动记录故障发生的时间,位置和类型,以帮助操作人员快速定位和解决问题,同时控制系统还支持远程监控与维护,将系统状态数据传输到远程监控中心,实现对设备的远程诊断与维护,在提高系统维护效率与响应速度的同时,也提高了系统的运行效率与可靠性。
3.性能测试与结果分析
3.1测试方法与实验条件
为了全面评估冲模自动取料装置的性能,设计了一系列严格的测试方法和实验条件。实验对象为一台经过校准和调试的冲模自动取料装置,实验在标准化实验室中进行,以确保外部环境对测试结果的影响最小。实验环境控制在室温20℃,湿度50%,无振动和强光干扰。测试内容包括取料速度、取料精度、系统稳定性和工作效率等关键性能指标。测试设备包括高精度位移传感器、速度传感器和数据采集系统,这些设备用于实时监测和记录装置的工作状态和性能参数。
取料速度测试的实验设计如下:设定了三种不同的运动轨迹(直线、曲线和复合轨迹)和两种速度要求(0.5m/s和1.0m/s),分别测量滑块在完成一个取料周期所需的时间。每种轨迹和速度条件下进行10次重复测试,记录每次测试的时间,以评估取料速度的稳定性和一致性。取料精度测试通过多次重复取料操作来进行,使用高精度位移传感器记录每次取料的最终位置,计算每次测试的偏差值。实验设定了五个固定的取料点,分别在每个取料点进行20次取料操作,计算每个取料点的平均偏差和标准偏差,以评估系统的定位精度。
系统稳定性测试的实验设计是通过长时间连续运行装置,观察并记录其运行过程中是否出现异常情况,如滑块抖动、定位误差增大等现象。实验将装置设定为连续运行8小时,每隔1小时记录一次滑块的定位数据和取料次数,分析滑块运动的平稳性和定位精度变化。为了进一步评估装置的工作效率,设计模拟实际生产环境的测试方案。实验设定了三个不同的工作负荷(低、中、高)条件,记录装置在单位时间内完成的取料次数。每种工作负荷条件下进行5次重复测试,计算平均取料次数和标准偏差,以评估装置的实际工作能力。
实验过程中,所有测试数据通过数据采集系统实时记录并传输到计算机进行处理和分析。数据处理采用Matlab等专业软件进行,使用统计分析方法计算每项测试的平均值、标准偏差和置信区间,以确保数据的准确性和可靠性。为了确保测试结果的可重复性,所有实验均在相同条件下进行,并对关键测试设备进行了多次校准。
3.2性能测试结果
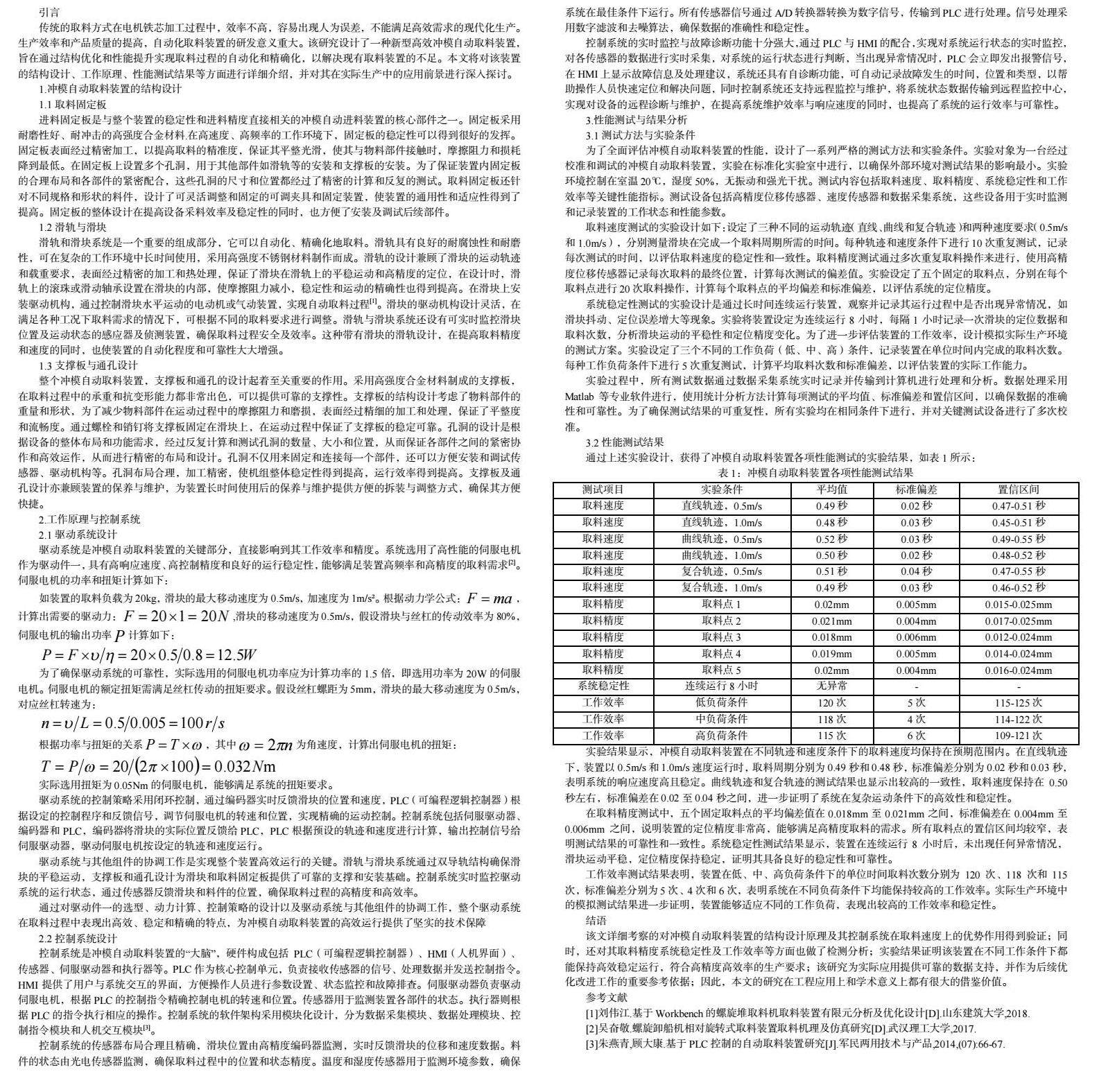
通过上述实验设计,获得了冲模自动取料装置各项性能测试的实验结果,如表1所示:
实验结果显示,冲模自动取料装置在不同轨迹和速度条件下的取料速度均保持在预期范围内。在直线轨迹下,装置以0.5m/s和1.0m/s速度运行时,取料周期分别为0.49秒和0.48秒,标准偏差分别为0.02秒和0.03秒,表明系统的响应速度高且稳定。曲线轨迹和复合轨迹的测试结果也显示出较高的一致性,取料速度保持在0.50秒左右,标准偏差在0.02至0.04秒之间,进一步证明了系统在复杂运动条件下的高效性和稳定性。
在取料精度测试中,五个固定取料点的平均偏差值在0.018mm至0.021mm之间,标准偏差在0.004mm至0.006mm之间,说明装置的定位精度非常高,能够满足高精度取料的需求。所有取料点的置信区间均较窄,表明测试结果的可靠性和一致性。系统稳定性测试结果显示,装置在连续运行8小时后,未出现任何异常情况,滑块运动平稳,定位精度保持稳定,证明其具备良好的稳定性和可靠性。
工作效率测试结果表明,装置在低、中、高负荷条件下的单位时间取料次数分别为120次、118次和115次,标准偏差分别为5次、4次和6次,表明系统在不同负荷条件下均能保持较高的工作效率。实际生产环境中的模拟测试结果进一步证明,装置能够适应不同的工作负荷,表现出较高的工作效率和稳定性。
结语
该文详细考察的对冲模自动取料装置的结构设计原理及其控制系统在取料速度上的优势作用得到验证;同时,还对其取料精度系统稳定性及工作效率等方面也做了检测分析;实验结果证明该装置在不同工作条件下都能保持高效稳定运行,符合高精度高效率的生产要求;该研究为实际应用提供可靠的数据支持,并作为后续优化改进工作的重要参考依据;因此,本文的研究在工程应用上和学术意义上都有很大的借鉴价值。
参考文献
[1]刘伟江.基于Workbench的螺旋堆取料机取料装置有限元分析及优化设计[D].山东建筑大学,2018.
[2]吴奋敬.螺旋卸船机相对旋转式取料装置取料机理及仿真研究[D].武汉理工大学,2017.
[3]朱燕青,顾大康.基于PLC控制的自动取料装置研究[J].军民两用技术与产品,2014,(07):66-67.

 京公网安备 11011302003690号
京公网安备 11011302003690号


