



- 收藏
- 加入书签

DoS攻击下基于最小时间间隔事件触发的多智能体一致性控制
 打开文本图片集
打开文本图片集
摘要:针对存在拒绝服务(Denial-of-Service,DoS)攻击和通信资源受限的线性多智能体系统一致性控制问题,提出了一种具有最小时间间隔的事件触发控制算法。不同于传统的事件触发控制策略,设计的事件触发机制可以保证成员间事件触发存在一个可调的正的最小时间间隔,可以避免系统出现芝诺行为。在事件触发时刻处于DoS攻击下时,智能体与邻居的通信被中断,在此基础上分析了DoS攻击的频率和持续时间,设计了一致性控制器。随后,采用合适的李雅普诺夫函数验证了所设计的控制器可以实现多智能体系统一致性控制。最后通过数值仿真验证了设计的控制器的有效性和可靠性。
关键词:多智能体系统;最小时间间隔;事件触发;DoS攻击
0引言
本文针对采用无向通信网络的多智能体系统进行了研究。使系统在考虑到DoS攻击的影响下,使用提出的分布式自适应最小时间间隔事件触发的算法实现系统的一致性目标。本文的主要贡献如下:
1)本文采用分布式的最小时间间隔事件触发控制算法,本文采用的最小时间间隔事件触发控制策略,可以直接计算出最小的触发间隔,避免了Zeno现象的产生。
2)本文研究了DoS攻击对采用最小时间间隔事件触发控制方案的多智能体系统的影响。为了能使多智能体系统达成一致性的控制目标,攻击频率和持续时间这些需要满足的条件被给出。
1问题描述
1.1系统模型
考虑具有以下线性连续时间模型的多智能体系统:
其中表示第个智能体。
本文的控制目标是设计分布式控制器,以保证多智能体系统的平均一致性,即对于任意,存在。
1.2假设
假设 1 在集合中,如果存在常数使得和,那么下面的不等式将一直成立:
假设 2 本文采用无向连通图描述多智能体系统各成员之间的通信拓扑网络。
2控制器设计及稳定性分析
2.1 控制器及事件触发函数设计
事件触发控制器设计为以下形式:
2.2稳定性分析
定理 1 对于多智能体组成的系统(1),在假设1-2的成立的条件下,则本文设计的控制率和最小时间间隔事件触发机制能够解决一致性控制问题。同时,误差将收敛到有界区域内。
首先,李雅普诺夫函数定义为以下形式:
从上式可以看出,随着时间,将会收敛到0。因此,变量、都是有界的。所有的多智能体状态都可以实现一致性控制。
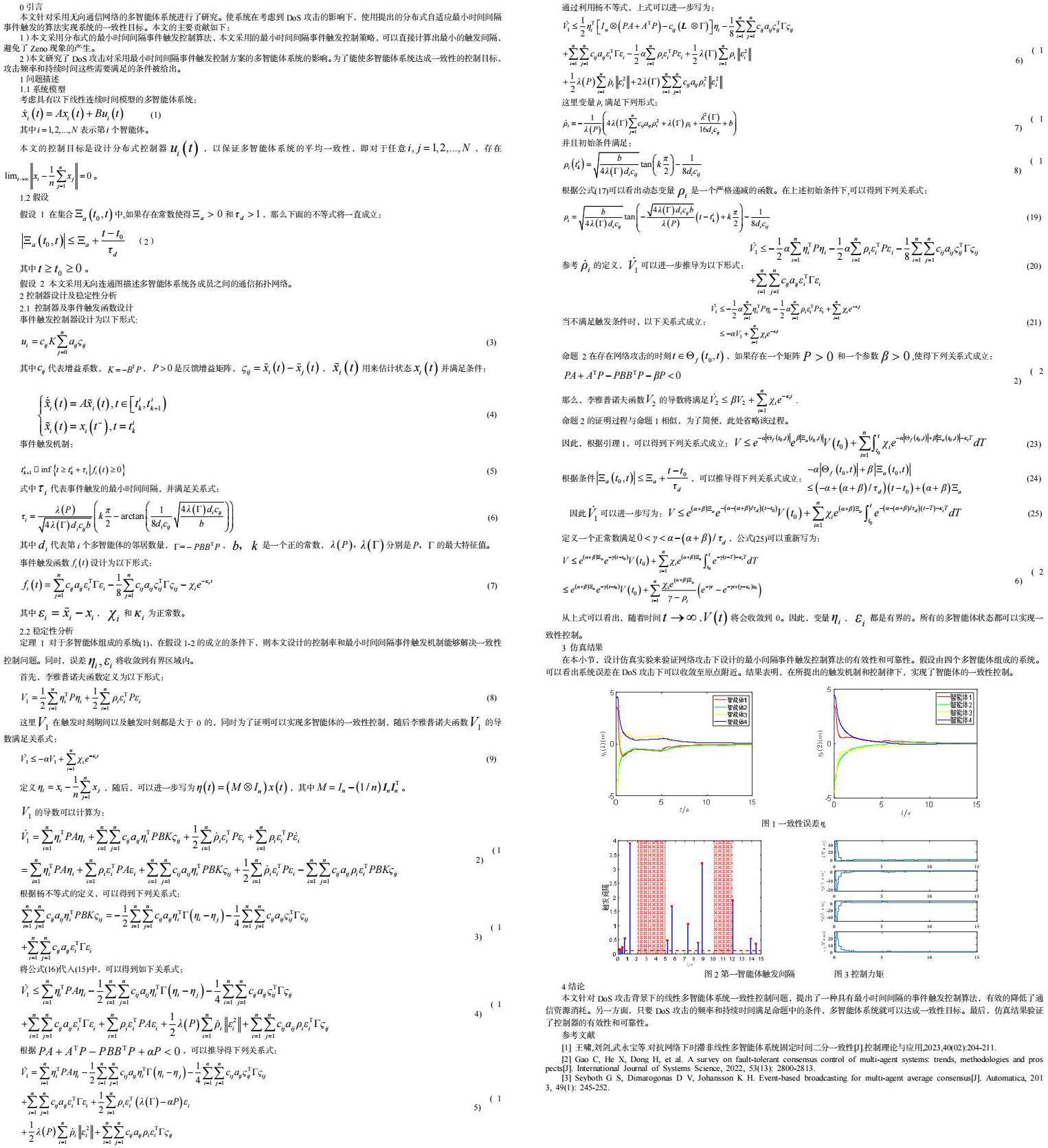
3 仿真结果
在本小节,设计仿真实验来验证网络攻击下设计的最小间隔事件触发控制算法的有效性和可靠性。假设由四个多智能体组成的系统。可以看出系统误差在DoS攻击下可以收敛至原点附近。结果表明,在所提出的触发机制和控制律下,实现了智能体的一致性控制。
4结论
本文针对DoS攻击背景下的线性多智能体系统一致性控制问题,提出了一种具有最小时间间隔的事件触发控制算法,有效的降低了通信资源消耗。另一方面,只要DoS攻击的频率和持续时间满足命题中的条件,多智能体系统就可以达成一致性目标。最后,仿真结果验证了控制器的有效性和可靠性。
参考文献
[1] 王啸,刘剑,武永宝等.对抗网络下时滞非线性多智能体系统固定时间二分一致性[J].控制理论与应用,2023,40(02):204-211.
[2] Gao C, He X, Dong H, et al. A survey on fault-tolerant consensus control of multi-agent systems: trends, methodologies and prospects[J]. International Journal of Systems Science, 2022, 53(13): 2800-2813.
[3] Seyboth G S, Dimarogonas D V, Johansson K H. Event-based broadcasting for multi-agent average consensus[J]. Automatica, 2013, 49(1): 245-252.

 京公网安备 11011302003690号
京公网安备 11011302003690号


