



- 收藏
- 加入书签

单力臂机械系统的鲁棒自适应控制建模设计
 打开文本图片集
打开文本图片集
摘要:针对具有参数不确定性的单力臂机械系统,通过引入直接自适应控制的思想,采用基于Lyapunov直接法的鲁棒模型参考自适应控制方法,可以在具有参数不确定性和未知非线性摩擦特性的情况下,只需要动、静摩擦的上界值就能使跟踪误差趋于零。
关键词:参数不确定;单力臂机械系统;鲁棒模型自适应控制;非线性摩擦
前言:高精度单机机械臂伺服系统是一种典型的高精度直流伺服系统[1],在实际应用中,该系统的跟踪性能受到两个因素的影响,一是系统存在的非线性摩擦环节[2],二是负载的变化[3]。对于高精度机械伺服系统,摩擦环节成为提高系统性能的障碍[4]。本文则是通过引入直接自适应控制的思想,采用基于Lyapunov直接法的鲁棒模型参考自适应控制方法,可以在具有参数不确定性和未知非线性摩擦特性的情况下,使跟踪误差为零,优势在于不需要建立摩擦模型,不需要精确的摩擦系数,且具有良好的鲁棒性。
一、不确定单力臂机械系统的模型建立
三、仿真及分析
被控对象的动态方程为
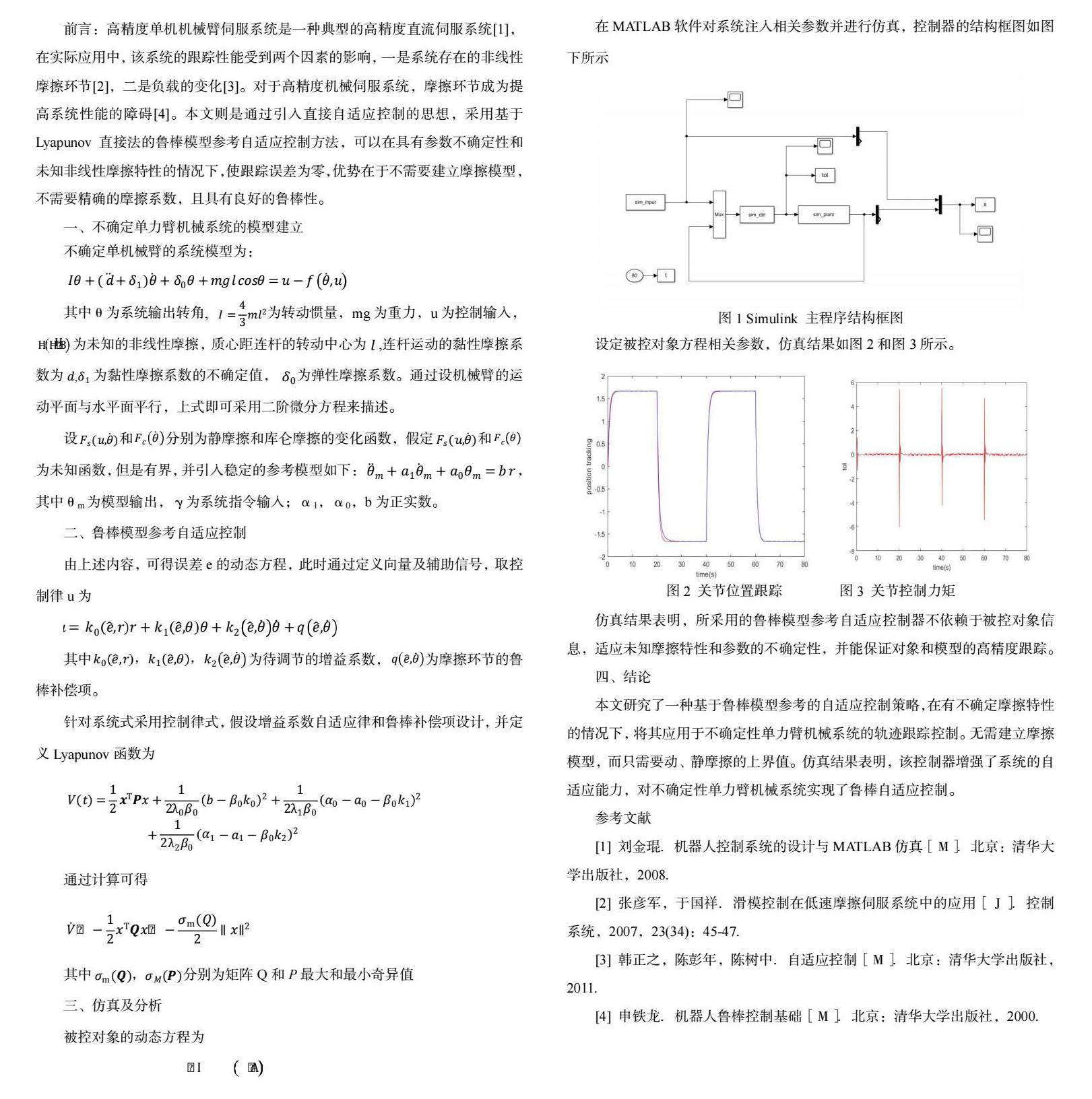
在MATLAB软件对系统注入相关参数并进行仿真,控制器的结构框图如图下所示
设定被控对象方程相关参数,仿真结果如图2和图3所示。
仿真结果表明,所采用的鲁棒模型参考自适应控制器不依赖于被控对象信息,适应未知摩擦特性和参数的不确定性,并能保证对象和模型的高精度跟踪。
四、结论
本文研究了一种基于鲁棒模型参考的自适应控制策略,在有不确定摩擦特性的情况下,将其应用于不确定性单力臂机械系统的轨迹跟踪控制。无需建立摩擦模型,而只需要动、静摩擦的上界值。仿真结果表明,该控制器增强了系统的自适应能力,对不确定性单力臂机械系统实现了鲁棒自适应控制。
参考文献
[1] 刘金琨.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社,2008.
[2] 张彦军,于国祥.滑模控制在低速摩擦伺服系统中的应用[J].控制系统,2007,23(34):45-47.
[3] 韩正之,陈彭年,陈树中.自适应控制[M].北京:清华大学出版社,2011.
[4] 申铁龙.机器人鲁棒控制基础[M].北京:清华大学出版社,2000.

 京公网安备 11011302003690号
京公网安备 11011302003690号


