



- 收藏
- 加入书签

上肢及肩背部助力型外骨骼设计
 打开文本图片集
打开文本图片集


摘要:外骨骼,严格的讲是指能够提供对生物柔软内部器官进行构型、建筑和保护的外部结构。随着科技的飞速发展,外骨骼被更多的用于“超级装”或扩充、增强人体的生理机能。本文通过结构构成、柔性设计、动力学分析、人机协作分析,使上肢及肩背部助力型外骨骼能够更好地帮助肩背部患有多发性硬化症、关节炎等疾病的群体克服活动困难的问题。
关键词:外骨骼、张拉结构、柔性设计、人机协作
吉林省大学生创新创业项目 项目编号:120723133
前言
早期的外骨骼从功能的角度来讲,仅仅具有力量放大的作用,它不会理解人体的运动规律,只是机械的随从。而随着科技的进步、结构器件性能的完善、控制策略的不断优化,外骨骼技术的发展方向逐渐转移到人机系统的协同运动上。
外骨骼本身具有影响人体运动的能力,如果再具备更加智能的感知能力与决策能力,那么这类外骨骼系统就会成为与人互相依存的“智能体”。为了达到人机协作的目的,就需要使人体与外骨骼在结构上更好地交融、在控制上更加智能化。本文针对“肩背部助力型外骨骼”进行分析与设计。
一、设计思路
人体的上肢与肩背部的动作复杂,具有多个自由度,为满足轻量化需要,因此采用欠驱动的设计方案。在上肢运动中,肘、肩以及脊柱的起着重要作用,又基于手臂运动姿态的单一性,于是对肩部、脊柱各设计一个主动驱动器,而对肘关节用弹性元件设计一个被动驱动器。也就是说,上肢助力外骨骼的单侧通过1个电机与1个弹性元件实现对肩部以及肘关节的助力,而脊柱部分通过1个电机对人体脊柱进行助力。
在传统的外骨骼驱动设计中,驱动单元与执行单元之间采用刚性连接较多,而外骨骼的人机交互环境具有复杂性与不确定性,就会导致载荷缓冲少、舒适度低、关节易受损的弊端。由此,在肩部驱动系统中引入弹性驱动器【1】,并且额外设计了1个肩部调整机构(粘弹性阻尼器)【2】。手臂部位外骨骼的运动动作比较单一,所以采用弹性元件作为蓄能装置较为合理。在驱动装置中选择卷簧作为驱动结构【3】,齿轮机构作为差速器传动及放大力矩。而脊柱作为人体上肢运动最为关键的一部分,对于脊柱的调整与保护尤为重要。而脊柱有着多种生理性弯曲,需要用柔性机构进行调整助力。于是设计了张拉整体结构的“外脊柱”,其中将由设置在腰部的驱动电机进行控制“外脊柱”的弯曲运动为了降低驱动器转动产生的惯量产生对不同部位运动的影响。肩部与脊柱的驱动器设置在了腰部。对肩部的助力系统通过助力带一端与驱动器进行连接,另一端与上臂臂托进行连接。当工作需要对肩部有向上的助力时,通过对助力带的传动,实现对肩部的助力。而对脊柱的助力系统主要通过驱动器对绳传动,实现对“外脊柱”的控制,进而助力人体脊柱的弯曲与伸直。对手臂运动的被动驱动装置设置在肩胛关节上,同样通过助力带一端连接在腕部的托套,另一端连接在被动驱动装置。在工作过程中,人体控制手臂向下抓取重物也就是伸肘运动时,驱动齿轮对卷簧收缩蓄力。而当人体向上抬取重物也就是屈肘运动时,卷簧释放能量驱动减速器放大力矩。助力带拉出的长度越长,蓄力越大,助力也就越大。同时为了保证人机交互的平稳性,在肩部设置了粘弹性阻尼器作为调整机构。
二、结构设计
外骨骼作为人机交互的重要工具需要从柔顺性、助力性、轻便性三大方面进行设计,同时将选择合适的柔性材料提供舒适性以及基于人体工学的限位装置来保证外骨骼的安全性。人体的上肢基本运动由肩部、手臂、肘关节、手腕、脊柱这5大部分配合完成。在这5大部分的不同配合下,会产生不同的运动形式。其中肘关节、肩、脊柱在运动中起到关键作用。
1、肘关节
(1)驱动设计
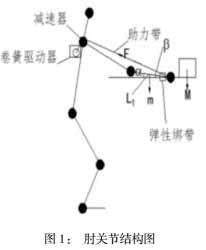
肘关节运动对人体上肢运动的影响和作用主要体现在支持上肢骨骼、活动上肢、提供前臂旋前旋后功能、提供旋转运动、缓冲和减震以及平衡和保持姿势等方面。肘关节结构图如图1所示。由于在生产活动中,人体上肢运动中的肘关节基本上以屈伸运动为主,运动状态具有单一性。为了保证外骨骼的轻便性同时也要满足对于肘关节助力的有效性,因此选择用卷簧这种在狭小的空间里持续提供较大的恢复力的弹性元件作为驱动器。由于卷簧不同状态下输出力矩差异较大,为了解决这种不均匀的输出力矩的情况。于是在卷簧与负载间设计一个适配的减速器降低输出转速,增加转矩,提升载荷能力。最后使用助力带一端连接卷簧驱动器一端连接前臂上的弹性绑带,进行力的传动,实现对肘关节的助力,同时也满足支撑与缓冲的控制任务。
(2)建模分析
L1为人体前臂长度;前臂与水平的夹角为α;助力带与前臂的夹角为β;重物质量M;人体前臂质量m为;手臂肌肉产生的力矩T 为;助力带对手臂产生的拉力F为。从外骨骼对手臂的助力分析来看,助力带通过对手臂产生斜向上的拉力来减少手臂肌肉的发力。
受力分析:
前臂对肘关节产生的力矩:T1=1/2m1gL1cosα
重物对肩关节产生的力矩:T2=MgL1cosα
助力带对肩关节产生的力矩:T’=FL1sinβ
得到穿戴外骨骼后受到的力矩:T=T1+T2-T’
未穿戴外骨骼时,所产生的力矩:T0=T1+T2
此时,可以求出外骨骼助力效率η:
η=(T0-T)/T0=FL1sinβ/MgL1cosα+1/2(m1gL1cosα)
2、肩关节
肩关节是人体最灵活的关节之一,具有多轴性和广泛的活动范围。这使得它能够支持上肢完成前屈、后伸、内收、外展、内旋和外旋等多种复杂动作。
肩关节也是人体的重要关节之一,可以起到支撑上肢的作用。在日常活动和运动中,能够承受上肢的重量和运动时的惯性力。肩关节还具有缓冲作用,可以避免上肢受到外力的冲击,降低受伤的风险。
(1)粘弹性阻尼器的设计
肩部的主动自由度通过电机进行驱动,给予此关节运动恰当的助力。而由于驱动器转动所产生的惯量会对肩部运动产生影响。为了提高肩关节的缓冲能力,减少振动幅度,提高肩部助力系统的稳定性。设计了粘弹性阻尼器在肩关节旋内/旋外的被动自由度上,利用粘弹性材料的粘滞性特性吸收振动系统的固有振动能量,产生阻尼力,从而有效控制振动。为运动系统提供必要的运动阻力,减少运动能量,使系统更加稳定。
(2)驱动设计
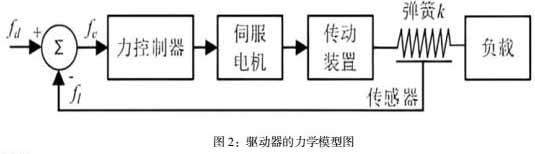
实际上对于外骨骼的发展要求其实更偏向于“外肌肉”的发展路线,能够柔顺地提供适当的助力,这要求驱动器寻找更具有柔性的驱动方式。而串联弹性驱动器在驱动单位与执行单位间有弹性阻尼特性的元件,选择串联弹性驱动器作为肩部驱动器使人机交互的柔顺性与安全性得到了提高。再通过具有高韧性的柔性材料助力带,一端连接串联弹性驱动器另一端连接上臂臂托,从而实现在适当的时候给予肩部的助力的控制任务。
驱动器的力学模型如图2所示。
(3)建模分析
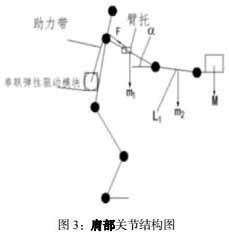
肩部关节结构图如图3所示。其中L1为上臂长度,m1为上臂质量,m2为前臂质量,M为重物质量,α为上臂与水平的夹角,F为助力带对臂托的拉力,助力带对臂托的拉力的角度为90°。
上臂对肩关节产生的力矩为
T1=1/2m1gL1cosα
重物对肩关节产生的力矩为
T2=(m2+M)gL1cosα
助力带对肩关节产生的力矩为
T’=FL1sin90°
得到穿戴外骨骼后受到的力矩为
T=T1+T2-T’
未穿戴外骨骼时,所产生的力矩为
T0=T1+T2
此时,可以求出外骨骼助力效率η为
η=(T0-T)/T0=FL1sin90°/(m2+M)gL1cosα+1/2(m1gL1cosα)
3、脊柱
(1)驱动设计
脊柱运动对人体上肢运动具有重要的影响和作用。通过维持脊柱的正确姿势和稳定性、传导力量、保护内脏和神经以及维持身体平衡等功能,脊柱为上肢运动提供了坚实的基础和保障。为了使人体的脊柱运动更加柔性,并且能够起到支撑助力的作用,使用外骨骼构成“外脊柱”用来引导以及助力脊柱的运动。其中,外脊柱采用张拉整体式结构,是由刚性结构与缆索组成的自张紧结构,具有柔顺性高,质量轻,作动控制方便的优点。
人体的脊柱具有四个生理弯曲,其中弯曲的部位分别是颈曲、胸曲、腰曲和骶曲。为了更好地助力脊柱的弯曲运动,脊柱的驱动设置在腰部中间位置,能够更好地助力脊柱三个部位的弯曲-扭转组合运动。外脊柱结构可以简化为三棱锥通过绳索连接,A1与A2端相连、B1与B2端相连、C1与C2端相连、D1与A1、B1、C1相连接,A端与C端与人体脊柱相贴合,通过控制外端D点绳索便可控制”外脊柱“的运动,达到助力效果。 如图4所示。
(2)驱动器模型
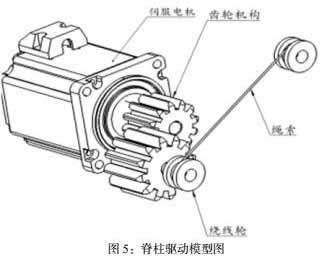
驱动脊柱的主要原理是通过驱动电机作为动力源【4】,齿轮机构带动“外脊柱”最外面一个绳索进而带动“外脊柱”进行运动,利用张拉结构的特性能够柔性地引导及助力人体脊柱运动。
如图5所示。
(3)建模分析
脊柱关节结构图如图6所示。其中L为驱动器到外脊柱重心距离,M为驱动模块质量,α为脊柱驱动模块与竖直的夹角,F1为绳索的拉力。
则重物对脊柱关节产生的力矩为
T1=MgLsinα
则绳索对脊柱关节产生的力矩为
T2=F1Ltanα
则外脊柱对脊柱关节产生的力矩为
T=T2-T1=F1Ltanα-MgLsinα
结束语
本文通过对上肢外骨骼与外脊柱结构设计与控制算法的分析优化,明确了结构柔顺化与轻便化、控制策略人性化与智能化的重要性与可行性,为外骨骼能够走进寻常百姓家助力生活提供了一定的理论基础。
参考文献:
[1]唐晓凡.主被动双模式上肢助力外骨骼设计与弹性驱动控制[D].华中科技大学:2022.DOI:10.27157/d.cnki.ghzku.2022.002447.
[2]汪宗保,汪宗兵,杨永晖,王从振,杨光,李业甫.上肢康复可穿戴式外骨骼助力机器人的机械设计与研究[J].中国医疗器械杂志,2022,46(01):42-46.
[3]解利,尚雅层,常宏.一种上肢助力外骨骼结构设计与仿真分析[J].现代制造技术与装备,2023,59(11):19-21. DOI:10.16107/j.cnki.mmte.2023.0673.
[4]吴冀.上肢助力外骨骼设计与研究[D].辽宁工程技术大学:2022.DOI:10.27210/d.cnki.glnju.2022.000074.

 京公网安备 11011302003690号
京公网安备 11011302003690号


