



- 收藏
- 加入书签

星载轻小型SAR数据实时处理设备设计
 打开文本图片集
打开文本图片集



摘要:本文主要介绍了星载轻小型 SAR 数据实时处理设备的设计,包括总体方案、成像硬件方案、目标检测与识别硬件方案、星上实时 SAR 成像算法、星上舰船检测算法和 SAR 定位算法。总体方案采用 DSP+FPGA 架构,成像处理模块由 DSP+FPGA 构成,完成 SAR 成像;检测模块由 FPGA+AI 模块构成,负责目标检测与识别。星上实时 SAR 成像算法主要针对 2m 条带模式和 0.5m 滑动聚束,采用 CS 成像算法。星上舰船检测算法使用 CFAR 算法,通过设置滑动窗口和计算检测阈值来检测舰船。SAR 定位算法通过 CFAR 算法检测出目标后,利用 RD 模型和相关数据计算目标在惯性地心坐标系中的位置,实现任意像素的定位。该设备设计旨在实现星载 SAR 数据的实时处理和目标检测。
关键词:星载 SAR、实时处理、硬件架构、成像算法
星载SAR遥感是一种广泛用于监测地球表面的遥感技术,可应用于船舶监测和石油泄漏跟踪、地形侵蚀、干旱和山体滑坡、森林砍伐和火灾等领域。其主要特点之一是能够在恶劣天气条件(如云、烟、雨)下工作,且无需光源。
SAR载荷数据必须经过处理才能获得地球表面的图像。SAR算法的计算和内存需求相当大,因此通常在地面站进行处理。然而,新的技术发展和应用需求,要求在星载平台上进行实时成像处理,并进一步实现图像分类和特定目标检测。
使用多核处理器和图形处理单元(GPU)等高性能计算平台来运行SAR图像形成算法在星载平台上并不可行,因为它们需要较大的体积、重量和功率,而轻小型SAR卫星的星载计算系统通常受到很大的限制。
DSP+FPGA架构的处理平台对于星载SAR实时处理系统来说是极具吸引力的,因为它们提供了高性能、紧凑的尺寸、减轻的重量和低功耗,同时允许星载硬件具备重新加载软件以应对不同任务和算法修改的需求。
1 总体方案
本项目瞄准小型化、低成本、高性能开展设计,聚焦落地在SAR载荷星上成像与检测识别功能。设计适用星上的软硬件一体化架构,形成通用化、可扩展、可灵活配置的星载计算平台,实现对目标类型、目标运动等更精确、更全面的认知。
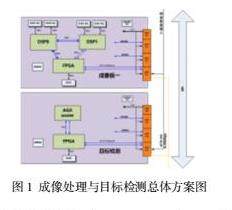
本项目成像和检测各有一个模块构成。模块与模块之间采用高速接口互联。其中SAR成像模块主要由DSP+FPGA构成,检测模块由FPGA+AI模块构成。如下图1所示。
2 成像硬件方案
成像处理模块主要完成SAR成像,目前在雷达数字信号处理中,GPU、FPGA和DSP都有广泛的应用,这3种平台都有强大的信号处理能力,具有各自的适用范围。一般来说,GPU的处理能力最强,GPU中可有数千甚至上万个流处理核心,支持浮点操作,擅长并行计算,但是功耗较高,控制能力较弱,在执行计算步骤比较复杂的算法时没有优势,在机器学习中得到广泛应用。FPGA作为可编程逻辑器件,采用改变内部逻辑块和布线的方式实现用户逻辑,而且当前高端FPGA中嵌入了大量专用DSP单元和块存储单元,处理能力强,虽然系统运行时钟比较低,但只要资源足够,就可通过流水线、并行化等处理通过面积换速度的方式增强FPGA处理能力,减小处理时间,但其成本比较高,开发难度较大,比如算法移植时需要先进行定点化(浮点云散消耗资源比较多),然后在中间步骤注意缩放以兼顾运算精度和动态范围;调试周期长,如果工程比较大,重新编译和生成下载用的文件可能需要数天时间,迭代周期长,调试不方便。
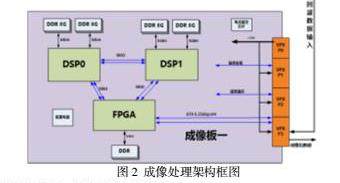
数字信号处理器(DSP)在通用处理器的基础上增强了核心中的数字计算单元,增加了乘法器数目,增加了特定算法的硬件加速单元,相比于通用处理器数字信号处理能力得到大大增强,DSP 目前主要采用 C 语言进行 DSP 开发,开发比较便捷,对于关键处理步骤可以采用汇编进行优化。本方案采用FPGA+DSP的架构[1]。如下图2所示。
本方案采用DSP为主,FPGA为辅的架构,主要功能描述如下:
每个DSP外挂两组DDR4,共计16GB存储。与FPGA采用SRIO X4 接口连接,主要完成SAR成像处理、辅助数据计算等工作。
FPGA对外一组DDR,主要完成载荷数据接收、数据预处理,参数计算加速、数据后处理以及数据转发、遥测采集、遥控指令解析执行、参数上注、看门狗等功能。
成像后的数据通过GTX接口输出给图像检测模块。每个模块独立输出。
3 目标检测与识别硬件方案
目标检测与识别模块主要负责对输入的图像数据进行智能处理,包括目标检测、目标识别,算法中需要进行大量的AI推理,故选用FPGA+AI芯片的架构。
AI芯片按照用途分为云端训练加速芯片和边缘端推理加速芯片两大类,云端训练加速芯片主要侧重于对深度学习网络的训练加速,算力强劲,但是功耗巨大,一般单块芯片功耗在100W以上。因此,不适合部署在星载嵌入式设备上。边缘端推理加速芯片算力约4T~22T,功耗约5~10w左右,主要用于运行已经训练好的深度学习算法,进行结果推理,对于一阶段的网络运行效果良好。目前,星载嵌入式设备上运行的深度学习算法均为已经训练好的网络,适合用边缘端推理加速芯片做加速。
星载嵌入式设备具有资源受限、运行环境复杂、硬件在轨无法扩展、软件维护困难等特点,针对这些特点,项目组在AI芯片选型时主要基于以下几个准则进行:
(1)通用性好。支持各类深度学习技术,支持多模态智能处理
(2)高能效。芯片所采用的指令集合处理器架构具有更优的能效比
(3)算力强。单芯片峰值算力至少达到12T@Int8,保证推理速度。
(4)提供高性能低功耗的深度学习解决方案
根据上述准则,项目选用了英伟达的AGX xavier模组进行开展设计,AGX xavier模组作为AI加速芯片。是专门用于深度学习的SOC芯片。其采用ARM+GPU架构,芯片内部集成主处理器单元CPU,神经网络单元NPU,支持INT8和INT16两种格式的整型运算,INT8理论最大算力可达32Tops。芯片支持2通道64bit ECC LPDDR4内存,并支持多种容量,可满足各类推理场景的计算和存储需求。同时还具有丰富的外围接口,PCIE、UART、SPI,SDIO、eMMC、GPIO等接口。适合用于数据节点的数据分析和推理应用,其适用领域主要是图像、视频智能分析的各种场合。
该NPU模块具有以下四个方面的优势:
(1)全新架构。新的架构基于片上网络构建,提高了芯片的并行处理效率,基于硬件的片内数据压缩,提升缓存有效容量和带宽。新架构提供INT16、INT8、INT4、FP32、FP16的全面AI精度支持,满足多样化神经网络的计算力要求,对于开发高精度智能模型以及模型后续的更新,有更好的适应性;
(2)推理性能增强。新架构在采用INT8精度进行AI推理计算时,非稀疏网络性能比第一代提升高达10倍,其内置的硬件视频和图片编解码器,可以在系统处理该类应用时,有效降低CPU前处理负载和PCIe带宽占用,帮众应用性能再进一步;
(4)支持多种神经网络推理加速算子:支持深度学习网络:AlexNet、GoogleNet、VGG、ResNet、YOLO、SSD等,支持框架:Caffe、TensorFlow、Pytorch等。
目标检测与识别模块实现框图如下图3所示。
其中,FPGA选用xilinx 公司的ultral+系列,负责图像预处理和数据路由,AI芯片选用英伟达的AGX xavier模组,通过PCIE接口和FPGA进行图像数据交换,总共算力可达30TOPS。
4 星上实时SAR成像算法
星上实时成像处理主要针对2m条带模式和0.5m滑动聚束。在方位向上,SAR主要是通过控制天线波束指向来获得方位向分辨率和成像宽度。对于滑动聚束模式,其天线波束指向一个远离成像场景中心的点。而对于条带模式,其天线波束指向无穷远点。因此,条带模式可看做是滑动聚束模式的一个特例。
接下来以滑动聚束模式为例来详细介绍SAR成像算法,本项目中采用CS成像算法[2],其处理流程如下图4所示,图中蓝色部分是条带模式CS成像流程。
5 星上舰船检测算法
雷达图像舰船检测已经广泛地应用于渔船监控、海洋资源保护、海况监测等领域。由于海洋和船舰目标对雷达信号的反射特性不同,舰船金属的后向散射系 数很大,而海洋的后向散射系数很小,在SAR影像中船舶表现为亮像素。
在SAR图像目标检测中使用最多的是恒虚警虚算法(CFAR)。如下图给出了通用的算法流程图。其大致步骤为:针对图像中的每一个像素,以该像素为中心像素,确定该像素的局部背景窗口位置。在事先确定好的杂波背景分布后,通过背景窗口内的部分或者全部杂波像素,计算并估计其分布参数。认为设定用来检测的虚警概率,通过其概率密度函数,求解该像素点对应的CFAR阈值。然后将该像素点的像素值与求解出的CFAR阈值进行比较,以此来确定该像素是否为目标像素点。为了求解出整幅SAR图像的目标像素点位置,对每个像素点的局部背景窗口统计可以看似成一个滑动窗口,因此局部窗口在滑动的过程当中,每一个像素点都多次参与了分布函数的参数估计计算[3]。
在计算每一个像素点局部窗口内的分布参数时,其值主要由局部窗口的尺寸以及构造形状决定。一般情况下,采用实心和空心两种方式构造形状。实心窗口的设计会使得待检测像素点周围的目标像素值泄露到杂波数据窗口中,从而统计的分布参数不够准确。因此,CFAR算法一般采用空心窗口作为其滑动窗口。空心滑动窗口的设计思想为:以待检测像素点为中心,根据待检测检测目标的尺寸以及图像分辨率的大小为依据,人为设置保护窗口和杂波背景窗口的大小,如下图所示。在对每个像素进行分布参数估计时,保护窗口内的像素点不加入计算,通过这种统计方式可以在一定程度上缓解目标像素点对杂波像素的影响。
完成每个像素滑动窗口内分布参数估计计算后,需要计算其检测阈值。SAR图像中每一个像素点的检测阈值都是通过下式求解得到:
其中,表示虚警率,表示概率密度函数。
虚警率主要通过人为经验值而设定。函数主要由图像场景决定,当图像场景分布比较均匀时,一般采用瑞利分布、高斯分布和对数正态分布函数作为检测的概率密度函数;当图像场景分布不太均匀时,一般采用概率密度函数比较复杂的Weibull、K和G等分布函数。
6 SAR定位算法
通过CFAR算法可检测出目标,把距离多普勒数据代入RD模型的三个方程,如下式所示。利用椭球模型或者DEM数据经过迭代计算出目标在惯性地心坐标系中的位置为,从而实现任意像素的定位。
根据换算出32个脉冲的中方位向的时间(N=32,n=0,1,2,…,N-1),根据时间t根据轨道星历可以获取卫星的位置和速度,斜距已知,距离向根据采样率转化为像素坐标,为斜距采样间隔可以算出任意像素点的斜距。和分别为地球的赤道半径和极半径,h为高程由DEM提供,目前可用的全球DEM数据有NASA的ASTER GDEM 30m 数据或SRTM 30m数据(此数据只覆盖南纬-60度到北纬60度)。通过上面的RD数学模型通过前向模型迭代实现任意像素在惯性地心坐标系中定位。此坐标可以转换为任意坐标系下的位置,用于后续的目标引导,识别与跟踪。综上所述,定位流程如下图10所示。
图10 R-D定位流程图
7 结束语
本文介绍了星载轻小型SAR数据实时处理设备的设计方案,包括总体方案、成像硬件方案、目标检测与识别硬件方案、星上实时SAR成像算法、星上舰船检测算法和SAR定位算法。实现星载SAR数据的实时处理和特定目标检测,以满足不断发展的应用需求。
随着科技的不断进步,星载SAR技术在海洋监测、资源勘探、军事侦察等领域的应用前景将更加广阔。我们的设计方案为星载SAR数据的实时处理提供了一种可行的解决方案,但仍有许多改进和优化的空间,为实现更高效、更精确的星载 SAR 数据处理而努力。
参考文献
[1] 陈亮,李涌睿,等.星载SAR在轨成像高效处理系统硬件实现设计[J].信号处理,2024年01期
[2] 刘彦斌.星载SAR实时成像处理算法研究[D].西安电子科技大学,2022
[3] 秦靖翔.星载SAR图像舰船检测算法研究[D].电子科技大学,2019

 京公网安备 11011302003690号
京公网安备 11011302003690号


