



- 收藏
- 加入书签

基于激光点云数据的桥面混凝土铺装施工平整度检测方法
 打开文本图片集
打开文本图片集
摘要:为了降低因桥面不平整现象引发的交通事故发生率,提升桥上通行的安全性,以激光点云数据为支持,优化设计桥面混凝土铺装施工平整度检测方法。根据桥面混凝土铺装施工流程,确定施工平整度测点,生成激光扫描路径。利用激光扫描传感器获取激光点云数据,经过去噪、配准等步骤,完成初始激光点云数据的处理工作。计算混凝土铺装施工平整度的检测指标,与设置的检测标准比对,得出平整度系数以及等级的检测结果。通过验证实验得出结论:与传统平整度检测方法相比,在水泥混凝土施工环境下,平整度检测误差降低了0.043,在沥青混凝土施工环境下,平整度检测误差也得到明显降低。
关键词:激光点云数据;桥面混凝土;铺装施工;平整度检测;
中图分类号:U416 文献标识码:A
引言
桥面铺装以混凝土为主要材料,分为水泥混凝土铺装和沥青混凝土铺装两种类型,根据桥体规模选择合适的桥面铺装方案[1]。在桥面混凝土铺装施工过程中,混凝土材料质量、施工操作精度以及车辆荷载等因素会对铺装施工质量产生负面影响,而桥面平整度是桥面混凝土铺装施工质量的直观体现。
以理想平面为参考,将桥面与参考线进行比较,在纵向上的偏差值称为平整度。平整度是一种客观的道路状况,它反映了路面的起伏和高度的改变。这些起伏不仅会对汽车的动力特性、行驶质量、道路上的动载产生很大的影响。检测桥面的平整度,可以确定道路的平整度,判明路面的一、多层破坏情况,根据平整度指数确定养护方案,定期检测,实现道路的科学管理。桥面平整度不仅是综合指标,而且是衡量桥面施工质量及使用效果的重要指标。在路面铺装竣工验收及后期的桥面养护中,必须使用专用的仪器对桥面平整度进行检测与评估。
结合当前桥面的发展状况和目前收集到的信息,路面混凝土铺装施工平整度检测的方式可以分为三类,分别为直尺检测法、连续性平整度仪测量法和响应平整度仪测量法,其中3m直尺的测量方法是按有关规定选取检测场地,并用观测法测定3m直尺与底板的最大间距,然后找出最大空隙的位置,并进行记录,以实测数据为依据,计算出桥面平整度。连续式平面测量机是以一种具有长桁架的二等分小梁为基础的小型汽车为基础,其上装有活动的检测箱,可以对桥梁的平整程度进行直接测量。响应平滑度计是一种以汽车行驶的非规律为依据的非正确性来反映汽车在一定的车速下的平整度。然而上述传统的平整度检测方法存在检测精度不佳的问题,而且在检测过程中可能会对桥面产生损害,为此引入激光点云数据处理与分析技术。
激光点云数据是一组三维空间坐标系内的矢量集,点云数据不仅有几何位置,而且还包含着色彩信息。色彩信息一般是利用摄像机采集到的图像,再根据所处的像素的色彩信息,给出相应的点。该强度信息的获得是由激光扫描设备所获得的反射波的强度,它与物体的表面材料、粗糙度、入射角、辐射能量、波长等因素相关。与其他数据相比,激光点云数据的稳定性更高,将其应用到桥面混凝土铺装施工平整度的检测工作中,以期能够提高施工平整度的检测精度。
1 桥面混凝土铺装施工平整度检测方法设计
优化设计桥面混凝土铺装施工平整度检测方法的工作原理是采用激光扫描的方式获取桥面的激光点云数据,根据点云数据确定桥面上任意一点的高程以及位置坐标,将桥面上所有位置的高程进行比对,确定桥面平整度指标的具体取值,从而确定当前桥面混凝土铺装施工的平整度等级[2]。在激光点云数据的采集过程中,点云的异常主要来自叉道和遮挡,可优先考虑这两种异常情况,来提高系统的自动化程度。
1.1设置桥面混凝土铺装施工平整度检测标准
从国际平整度指数和标准差指数作为桥面混凝土铺装施工平整度的一级检测指标,其中指数能较客观地反映桥面情况,能反映出行人与车辆行驶的舒适程度,能很好地与桥面条件结合,与其它指标有很好的相关性,而指数指的是高程值的标准差。上述平整度一级检测指标的计算公式如下:
公式1中变量为车辆的行驶距离,和分别对应的是簧上质量和簧下质量的绝对位移,为每一步长中含有的高程值的数目,和分别为一个步长内的第个高程值以及所有高程的算术平均值。在考虑行人对颠簸的承受度、行驶车辆行驶安全等因素下,设置不同混凝土铺装条件下桥面平整度的检测标准[3]。设置水泥混凝土铺装施工桥面上国际平整度指数的门限值为2.5,标准差指数的门限值为1.5,而对于沥青混凝土铺装施工桥面而言,平整度指数和的门限值分别为2.0和1.2,当检测得出桥面混凝土铺装施工的平整度指数高于门限值,则认为当前桥面处于平整度的合格位置,否则判定当前桥面平整度不合格。
1.2生成激光扫描路径
根据桥面混凝土铺装施工流程确定桥面的基本结构,并在桥面上设置平整度检测点,并对各个检测点的位置进行标记。选择桥面两端的任意一点作为激光扫描起点,利用公式2计算其他检测点与扫描起点之间的距离。
公式2中和分别表示的是激光扫描起始点以及任意平整度检测点的位置坐标[4-5]。选择距离最短的检测点作为激光扫描工作中的第二个节点,那么起始点与第二个节点之间的扫描路径可以量化表示为:
上式中表示激光扫描方向角。按照上述流程,将桥面上的所有检测点纳入到激光扫描路径中,并实时检测当前节点是否为桥面终点,若检测结果为“是”,则停止路径连接环节,否则需要继续检测下一路径节点[6]。在此基础上,对初始生成的激光扫描路径进行平滑处理,处理过程如下:
公式4中变量和分别表示平滑路径曲线的弧长和切向角。利用公式4对初始生成扫描路径中的所有节点进行处理,最终的输出结果即为激光扫描路径的生成结果。
1.3采集桥面的激光点云数据
将激光器安装在车辆或其他移动设备上,按照生成的激光扫描路径进行移动。将激光扫描传感器调整至工作状态,激光扫描传感器内部半导体激光器发射的光通过聚焦透镜在被测量对象的表面上形成了一个大约0.3mm的光点,通过成像透镜将散射光吸收并在PSD上成像。如果被测量的平面为O,聚焦光点就会在PSD的中央位置上进行成像;如果被测量的桥面在参考平面的两边,那么聚焦光点就会在PSD的中心两边对应的位置形成。利用PSD上成像点与其中心的距离X值,可以得到测量表面与参考平面O的偏差,也就是激光测距传感器测量到的距离,然后通过合适的转换成为标准模拟电流信号并输出。
将激光发射器的扫描角度标记为,激光扫描仪测量得出距离可以表示为:
式中为激光扫描仪与目标桥面之间的垂直距离值,得出的计算结果也就是桥面上的凹槽深度。通过激光扫描仪的实时移动,得出桥面激光点云数据的采集结果为:
将公式5的计算结果代入到公式6中,得出桥面反射回的激光角点的坐标信息。激光扫描器可以获得大量的三维坐标数据的激光点云数据。
1.4桥面激光点云数据处理与分析
为了提高桥面激光点云数据的采集质量,需要对初始采集的激光点云数据进行处理,处理步骤包括点云拼接、点云去噪、点云配准等。其中点云拼接的目的是将采集的初始点云数据样本按照时间或空间关系进行整合,激光点云数据的拼接过程实际上就是一种刚体变换过程,则激光点云数据的拼接处理结果可以表示为:
上式中和分别表示激光点云数据的初始采集集合和拼接处理结果,和对应的是激光点云数据的旋转量与平移量。桥面激光扫描仪进行外业数据采集时,由于工作环境、仪器、测量方法等因素的影响,导致激光点云数据中出现噪声。为了减少噪音对后续点云的配准等的影响,必须去除噪声点云。点云去噪的目的是去除离群点、行人、车辆以及离散噪声。激光点云数据去噪处理采用的是模拟滤波器,滤波器的平方幅频响应函数如下:
其中和分别表示的是滤波器的通带截止频率和阻带截止频率,变量表示滤波器的相对频率,为滤波器阶数。将初始采集的桥面激光点云数据输入到滤波器中,得出的点云数据过滤结果可以表示为:
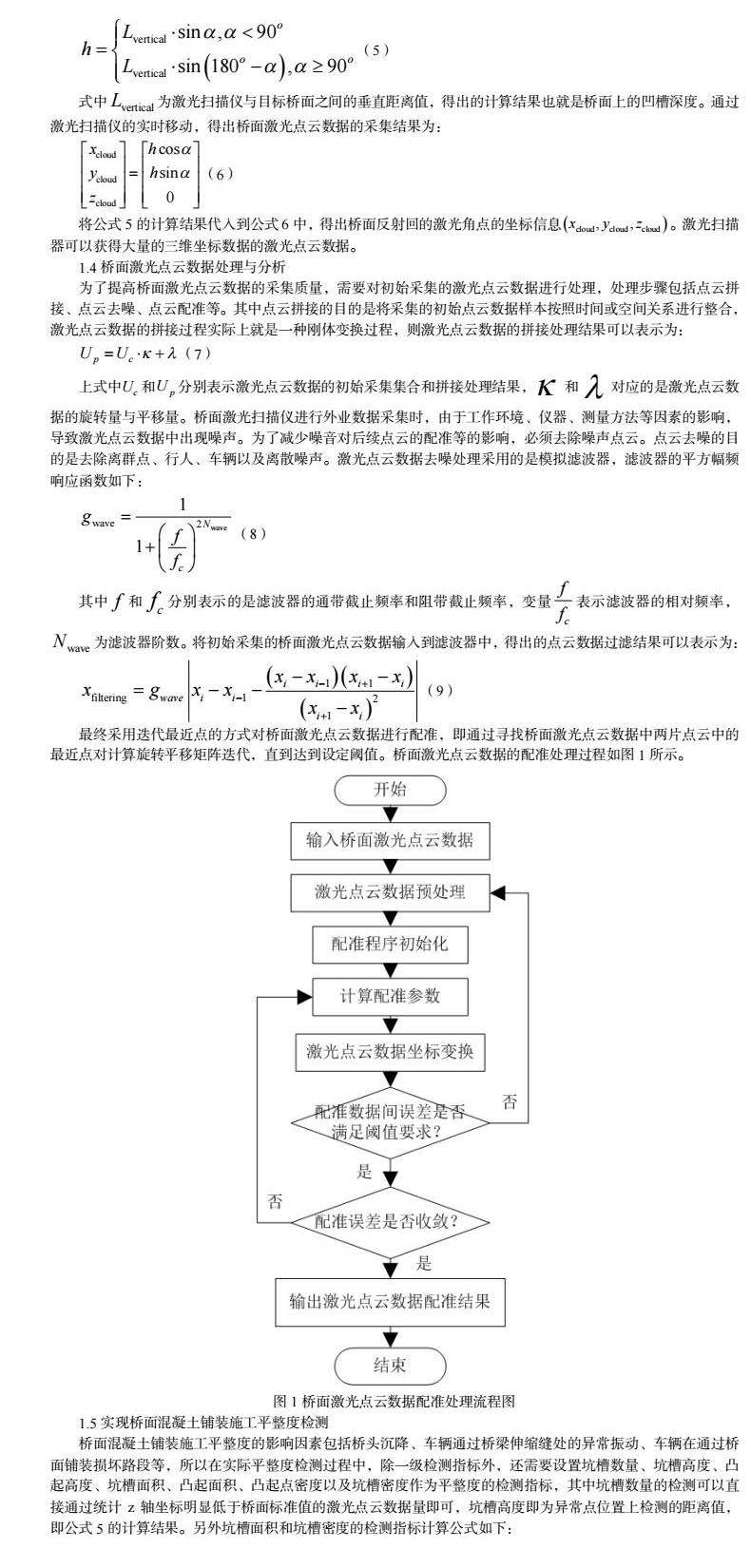
最终采用迭代最近点的方式对桥面激光点云数据进行配准,即通过寻找桥面激光点云数据中两片点云中的最近点对计算旋转平移矩阵迭代,直到达到设定阈值。桥面激光点云数据的配准处理过程如图1所示。
1.5实现桥面混凝土铺装施工平整度检测
桥面混凝土铺装施工平整度的影响因素包括桥头沉降、车辆通过桥梁伸缩缝处的异常振动、车辆在通过桥面铺装损坏路段等,所以在实际平整度检测过程中,除一级检测指标外,还需要设置坑槽数量、坑槽高度、凸起高度、坑槽面积、凸起面积、凸起点密度以及坑槽密度作为平整度的检测指标,其中坑槽数量的检测可以直接通过统计z轴坐标明显低于桥面标准值的激光点云数据量即可,坑槽高度即为异常点位置上检测的距离值,即公式5的计算结果。另外坑槽面积和坑槽密度的检测指标计算公式如下:
公式10中和分别表示坑槽数量和桥面检测面积,为坑槽在水平方向上的位移量。同理可以得出其他平整度指标的计算结果。根据二级平整度检测指标的设置情况,对国际平整度指数和标准差指数的计算方式进行调整,并得出一级平整度检测指标的具体取值。将当前桥面混凝土铺装施工平整度指标的计算结果与设置的检测标准进行比对,从而确定当前桥面平整度等级,最终将平整度参数和平整度等级以可视化的形式输出,完成桥面混凝土铺装施工平整度检测工作。
2平整度检测方法验证实验
2.1桥面混凝土铺装施工工程概况
此次实验分别选择以水泥混凝土和沥青混凝土作为原材料的桥面铺装施工工程作为实验对象,混凝土的铺装长度约为55.0km,桥面结构设计为5cmAC-25型下面层+5AC-20型中面层+3cm AC-13型上面层,桥面宽度为27m。施工过程中使用的水泥混凝土材料为普通混凝土,其干表观密度为3400kg/m3,抗压强度为34MPa,而沥青混凝土材料采用的是石油沥青。在开始桥面混凝土铺装施工之前,首先挖除浮渣,用高压水枪将浮渣清洗干净,使其保持湿润。利用四等水准法,在桥头桥的中段稳定位置设置高程控制点,并与其他水平点联测,以保证精度。按照特定的尺寸进行分段,使用水平测量法测量各方块周围的设计标高,并将3cm*3cm的角钢紧固于其块边,作为混凝土基础。人工整平后,用平板机进行水平并联振动捣实。用手工把一面平整,同时用辊子连续几次将其磨平。采用真空吸水法,根据温度的不同吸收时间,再用磨光机进行脱胶和平整。用钢管刮板,顺桥方向不断重复,直到平整度符合要求为止。经质检合格后,完成桥面混凝土铺装施工。
2.2安装激光扫描器
由于优化设计平整度检测方法以激光点云数据作为支持,因此需要在实验环境中安装激光扫描器设备,获取桥面的激光点云数据样本。实验中使用的激光扫描器型号为I-Site8820,该装置的基本附件有内置全景照相机、内置 GPS和数码罗盘、无线数据通讯等。I-Site8820激光扫描器采用脉冲测距原理,可以对目标和地形进行快速扫描,获取精确的数据。I-Site8820型激光扫描器的最大探测范围为1500米,最高速度可达300000点/s,激光发散度0.3毫拉德,角度精度0.0005°,设备防护级别为IP65,能够在极端条件下工作。将选择的激光扫描仪被安装在移动车辆后座的底部,用四个螺钉把激光扫描仪固定在一个激光扫描仪上,通过水平仪调整激光器的位置,保证激光器水平。
2.3设置桥面混凝土铺装施工坑洼与凸起点
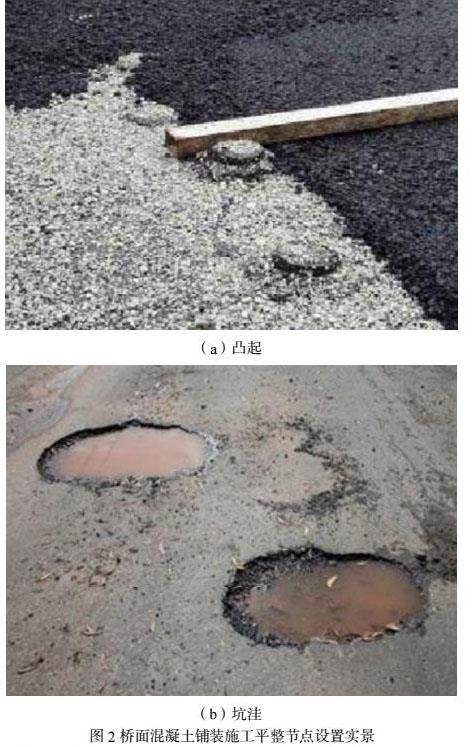
在保证桥面混凝土铺装施工平整度合格的前提下,在桥面上设置坑洼点和凸起点,采用控制变量法确定当前研究环境中的实际平整度情况。图2表示的是桥面混凝土铺装施工中局部坑洼与凸起点的设置情况。
水泥混凝土桥面环境与沥青混凝土桥面环境的坑洼与凸起点设置情况存在明显差异,根据坑洼与凸起点的设置情况计算铺装施工平整度的理论值。
2.4描述验证实验过程
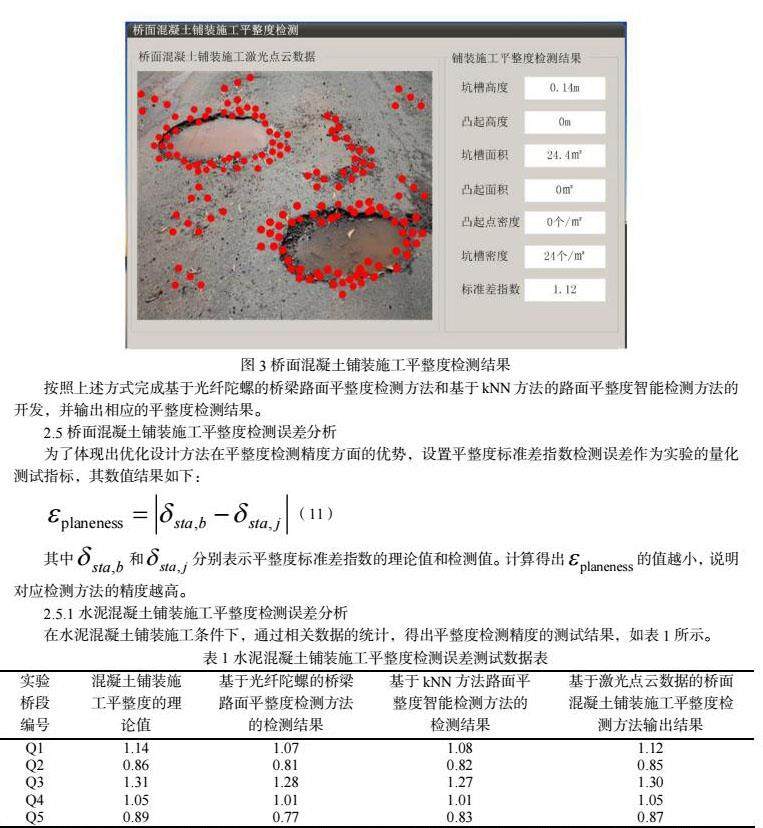
调试安装的激光扫描器,保证该设备能够在桥面环境中正常使用。同时启动激光扫描器以及移动车辆,获取激光点云数据。利用OpenGL工具和Qt平台实现桥面混凝土铺装施工平整度检测方法的开发,并将收集的激光点云数据输入其中,输出施工平整度的检测结果,如图3所示。
按照上述方式完成基于光纤陀螺的桥梁路面平整度检测方法和基于kNN方法的路面平整度智能检测方法的开发,并输出相应的平整度检测结果。
2.5桥面混凝土铺装施工平整度检测误差分析
为了体现出优化设计方法在平整度检测精度方面的优势,设置平整度标准差指数检测误差作为实验的量化测试指标,其数值结果如下:
其中和分别表示平整度标准差指数的理论值和检测值。计算得出的值越小,说明对应检测方法的精度越高。
2.5.1水泥混凝土铺装施工平整度检测误差分析
在水泥混凝土铺装施工条件下,通过相关数据的统计,得出平整度检测精度的测试结果,如表1所示。
将表1中的数据代入到公式11中,计算得出水泥混凝土铺装施工环境下,传统方法的平整度标准差指数检测误差的平均值分别为0.062和0.048,而优化设计方法的平均检测误差为0.012。
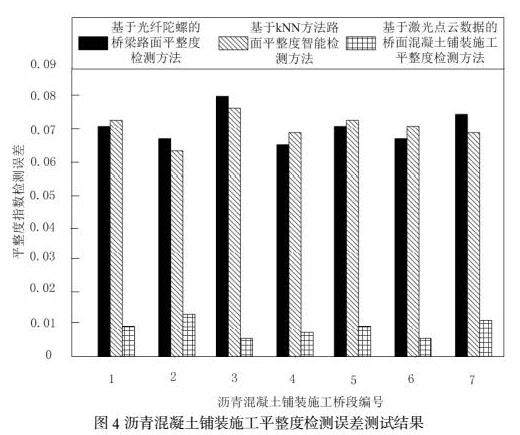
2.5.2沥青混凝土铺装施工平整度检测误差分析
在沥青混凝土铺装施工环境下,通过相关数据的统计以及公式11的计算,得出平整度检测误差的测试结果,如图4所示。
从图4中可以直观的看出,与传统检测方法相比,优化设计方法得出的平整度检测误差更小,即平整度检测精度更高。
3结束语
以激光点云数据作为根据,最大程度的还原桥面的真实平整情况,对于桥面道路的快速维修具有积极作用。为了改善桥面的平整性,必须从材料的设计等方面入手。在原材料的控制上,沥青混合料应该选择具有一定比例的矿料级配,并且含有少量的沥青,在车辆的作用下,不会产生变形,沥青路面不易破裂,因此可以改善路面的平整性。此外,在选用合适的细集料时,应采用现场试验与经验方法,以获得最佳的油石比。并根据试验结果对现有的沥青拌和料进行调整。
参考文献
[1]张金喜,王琳,周同举,等.基于行车振动的路面平整度智能检测方法研究[J].中外公路,2020,40(01):31-36.
[2]杨丹丹,王立新,胡文彬,等.基于光纤陀螺的桥梁路面平整度检测研究[J].半导体光电,2020,41(05):700-704.
[3]熊文,李刚,张宏伟,等.基于点云数据与工程知识的桥梁形态变化识别方法[J].湖南大学学报(自然科学版),2022,49(05):101-110.
[4]刘继松,余少乐,张渤钰,等.基于三维激光扫描的预制混凝土板拉毛叠合面粗糙度检测方法研究[J].建筑结构,2021,51(23):127-132.
[5]董之南,时培好,高晗.基于移动式激光扫描的点云数据处理[J].测绘通报,2021(08):97-101.
[6]朱依民,田林亚,毕继鑫,等.基于PTD和改进曲面拟合的高山区水电工程机载激光雷达点云滤波方法[J].水利水电科技进展,2021,41(01):35-40.

 京公网安备 11011302003690号
京公网安备 11011302003690号


