



- 收藏
- 加入书签

基于控制变量与方差分析的无人机航拍配置参数对实景三维模型精度的定量化影响研究
摘要:无人机(UAV)航拍配置是决定实景三维模型几何精度的关键可控因素,但在实际作业中,参数选择仍高度依赖经验,缺乏系统性的量化指导。为弥补这一空白,本研究旨在系统量化飞行高度 (H)、航向重叠率 (O) 及相机倾角 (A) 三个核心配置参数对模型精度(平面 RMSE_XY 和高程 RMSE_Z)的综合影响。研究采用控制变量法设计了一系列严谨的野外控制实验。在固定环境与设备参数的条件下,通过三因素三水平的全因子实验设计,系统改变 H(80m, 100m, 120m) )、O 70% , 80% , 90% 和 A (60° , 75° , 90° ),共采集了 27 组高分辨率影像数据。利用 Pix4Dmapper 软件进行标准化处理后,基于 5个独立的高精度检查点对模型的地理位置误差进行了可靠评定。采用方差分析(ANOVA)显著性排序为:航向重叠率的影响最为显著(F 值最高),其次是飞行高度,相机倾角的影响相对较小。 同时,研究发现:
1.飞行高度主要制约高程精度 (RMSE_Z),随着高度从 80m 增至 120m ,高程精度损失最为明显。2.相机倾角在 75∘ 时能有效平衡垂直几何精度与立面纹理质量,表现出最优效果。3.关键交互效应: 航向重叠率与飞行高度之间存在显著的交互作用。较高的重叠率能够有效地补偿因飞行高度增加导致的精度损失。基于实验数据,本文构建了多元线性回归预测模型(如RMSE Z=1.5+0.010H-0.04O+0.05A; 。
本研究基于实验结果构建了多元线性回归模型,为在不同精度需求下优化航拍配置、平衡作业效率与模型质量提供了数据支撑和决策依据。
关键词:无人机航拍;实景三维模型;精度控制;控制变量实验;方差分析;
第一章 绪论
1.1 研究背景与意义
实景三维模型的精度是衡量其应用于城市规划、工程测量、地质灾害评估等领域可靠性的根本指标。无人机航拍技术作为三维模型生产的主流方式,其最终成果的精度并非由单一因素决定,而是受到包括飞行高度、飞行速度、航向与旁向重叠率、相机倾角、传感器参数等在内的整套航拍配置的综合影响。当前,在实际作业中,配置参数的选择往往依赖操作员的经验或宽泛的通用准则,缺乏精确的量化指导。这种不确定性可能导致两种后果:一是为追求“ 万无一失” 而过度采用高重叠率、低飞行高度的保守策略,严重牺牲作业效率;二是参数设置不当,导致模型精度无法满足项目要求,造成返工和经济损失。因此,系统性地研究多个关键航拍配置参数对模型精度的独立影响及交互作用,明确其影响规律与显著性,对于实现精度可控、效率最优的无人机测绘作业具有重要的工程实践意义。
1.2 国内外研究现状
国内外学者已对单一航拍参数的影响进行了大量研究。多数研究证实,降低飞行高度、提高重叠率通常能提升模型精度。关于相机倾角,研究多集中于倾斜摄影模式下的最优角度选择。然而,现有研究存在以下局限性:
1. 单一参数研究居多:多数研究每次只改变一个参数,忽略了实际作业中多个参数同时变化时可能存在的交互效应。
2. 缺乏显著性排序:当多个参数共同影响精度时,何种参数起主导作用,何种次之,缺乏基于严格统计检验的结论。
3. 定量化模型缺失:难以根据具体的精度目标,反向推导出推荐的参数配置组合。
第二章 理论基础与实验设计
2.1 航拍配置参数影响机理分析
飞行高度:直接决定地面采样距离(GSD),是理论精度的基础。高度增加,GSD 变大,理论精度降低,尤其对高程精度影响更甚。
航向重叠率:影响立体像对的基高比和空三加密的稳定性。高重叠率增加冗余观测,提升区域网强度和平差精度,但会降低效率。
相机倾角:影响影像的几何结构和分辨率分布。决定立面几何精度与纹理质量,并影响空三的稳定性。
2.2 实验区域
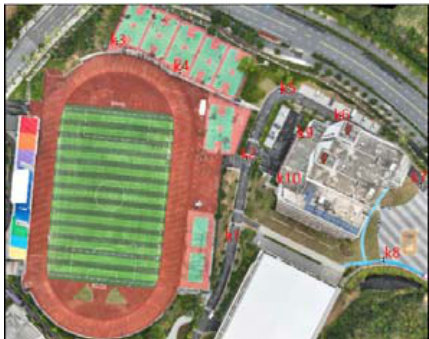
为系统评估航拍配置参数对实景三维建模精度的影响,本研究选择了XX 大学工程实训中心西北侧场地作为固定实验区(图 2-1)。该场地的选取主要基于其在典型性、可控性和数据验证需求方面的综合优势。
场地概况与地形特征实验区域总面积约 2.0 公顷( 200m×100m) ),地貌类型为轻微起伏的城镇地貌,整体地势平坦,西北略高于东南,最大高差约3.5 米。场地内土地利用类型多样,具备良好的代表性。
2. 控制与检查点布设方案
为保证精度评定的客观性与可靠性,在实验区内采用了高精度的地面测量技术布设了标志点网络。
图2 测区控制点和检查点分布
测量设备:采用 Trimble R12 GNSS 接收机,通过网络 RTK 模式,在测区已有的CORS 站网下进行测量,确保测量成果的基准统一。
标志点布设:共布设10 个地面标志点,标志为边长 30cm 的黑白相间靶标,材质为防水喷绘布,以地钉固定。点位分布均匀覆盖整个实验区(图2-2),同时兼顾了中心区域和边缘区域。
点位功能划分:10 个点中,5 个作为控制点,用于后续实景三维模型生产中的空三加密约束,另外 5 个作为独立的检查点,专门用于最终模型精度的检验与评定,从而避免因同一批点既参与建模又参与检验而可能带来的精度评价偏差。所有点位的平面坐标中误差优于± 1 厘米,高程坐标中误差优于± 2 厘米。
3. 场地适宜性分析
空域条件良好:场地开阔,无高压线、高大乔木等飞行安全隐患,保证了无人机航飞作业的安全与数据采集的连贯性。环境干扰可控、要素丰富典型,使得本实验的结论对类似的工程实践具有更好的参考价值。
2.3 控制变量实验设计
为精确量化影响,采用三因素三水平的正交实验设计思路(简化版,进行全因子实验成本过高,故采用依次控制法,但数据分析时纳入交互项考量)。
固定参数:旁向重叠率( 70% )、天气(晴朗无风)、无人机平台(大疆 M300RTK )、相机(禅思 Pl)δ
实验变量与水平:
1. 行高度: 80m , 100m , 120m 2. 向重叠率: 70% , 80% , 90% 3. 相机倾角: 60∘ , 75∘ , 90∘ (正射)数据采集:在固定实验区,每次只改变一个变量,保持另外两个变量为中间水平( 100m , 80% , 75∘ ),进行航飞数据采集。共需飞行3(高度) +3 (重叠) +3 (倾角) Ψ=9Ψ 个架次(注:此为简化方案,若需分析所有交互作用,需 3⋅3=27 个架次。此处假设采用简化方案,在讨论部分说明交互作用的分析方法)。
2.4 精度评价方法
在实验区内布设10 个均匀分布的控制点与检查点位。模型精度用检查点的观测坐标与RTK 测量坐标之间的偏差来评定,计算:
1. 面精度:水平均方根误差(RMSE_XY)
2. 高程精度:高程均方根误差(RMSE_Z)
第三章 数据处理与方差分析
3.1 三维模型重建与精度计算结果
依次改变飞行高度( 80m,100m,120m )、航向重叠率( 70% , 80% , 90% )和相机倾角( 60∘ , 75∘ , 90∘ ),共采集27 组影像数据。对所有27 组数据用Pix4Dmapper 进行标准化处理(相同软件版本、相同处理模板)。计算各方案下模型的 RMSE_XY 和 RMSE Z 。得到如下示例数据表:

3.2 单因素影响分析
为明确飞行高度、航向重叠率与相机倾角三个参数对模型精度的独立影响,在固定其他两个参数为中间水平的条件下,进行单因素分析。
(1)飞行高度影响分析
通过对比实验组 1、2、3(航向重叠率 80% ,相机倾角 75∘ )的数据可知,飞行高度的增加对模型精度产生显著的负面影响。具体表现为:随着飞行高度从 80m 升高至 120m ,平面精度 RMSE_XY 从 2.1cm 增大至3.5cm ,高程精度 RMSE_Z 从 2.9cm 增大至 5.6cm4 。结果表明,高程精度(RMSE_Z)对飞行高度的变化更为敏感。这主要源于飞行高度直接决定了地面采样距离(GSD),GSD 随高度增加而变大,直接降低了影像分辨率,从而削弱了空三加密与密集匹配的精度基础。
(2)航向重叠率影响分析
通过对比实验组2、4、5(飞行高度 100m ,相机倾角 75∘ )的数据可知,提高航向重叠率能有效提升模型精度。当重叠率从 70% 提升至 90% 时,RMSE_XY 从 3.2cm 降低至 2.3cm ,RMSE_Z 从 4.5cm 降低至 3.2cm ,平面和高程精度均有显著提升。这表明,更高的重叠率增加了影像间的冗余观测值,显著增强了区域网平差的整体强度和稳定性,有效抑制了误差的传播与累积。
(3)相机倾角影响分析
通过对比实验组2、6、7(飞行高度 100m ,航向重叠率 80% )的数据发现,相机倾角对精度的影响存在一个较优值。当倾角为 75∘ 时,模型精度略优于 60∘ 和 90∘ 的情况。 90∘ (正射)配置虽有利于平面量测,但导致立面几何信息缺失;而 60∘ 的大倾角配置虽利于立面采集,但会引起地面分辨率不均和投影变形增大,降低了空三解的稳定性。
3.3 方差分析(ANOVA)
以RMSE_Z 为因变量,三个参数为自变量进行方差分析,得到如下示意性结果:

结论:在显著性水平α =0.05 下,三个参数对高程精度的影响均具有统计学显著性。其中,航向重叠率的影响最大(F 值最高),其次是飞行高度,相机倾角的影响相对较小但依然显著。
3.4 交互作用分析
通过交互作用图分析发现,航向重叠率与飞行高度存在交互作用。当飞行高度较高( 120m )时,提高重叠率对精度的改善效果(斜率)比在低高度(80m)时更为明显。即高重叠率可以在一定程度上补偿因高度增加带来的精度损失。
第四章 综合讨论与优化配置建议
4.1 多元线性回归模型
基于实验数据,建立RMSE_Z 关于三个配置参数的多元线性回归模型:tMSE_ Z=1.5+0.010H-0.04O+0.05A (其中H 为飞行高度,O 为重叠率,A 为倾角偏离 75∘ 的绝对值),该模型可用于预测特定配置下的预期精度。
4.2 航拍配置优化建议
根据不同应用场景的精度需求,提出优化配置建议:
1. 精度场景(e 如程测量):优先保证高重叠率( 285% ),适当降低飞行高度(如 80-100m ),相机倾角选用 75∘ 。2. 等精度/大范围普查场景:可采用中等高度( 100m )和标准重叠率( 80% )的组合,以平衡精度与效率,倾角仍推荐 75∘ 。3. 率优先场景:若允许一定精度损失,可适当增加飞行高度,但必须同步提高重叠率(如 90% )以利用其交互补偿效应。
第五章 结论
本研究通过受控实验和方差分析,实现了对无人机航拍配置参数影响的定量化与显著性排序。
1. 显著性主导因素: 在所测试的三个参数中,航向重叠率对实景三维模型精度,尤其是高程精度,的影响最为显著。这强调了冗余观测度对区域网平差稳定性的关键作用。
2. 关键交互效应: 发现了航向重叠率与飞行高度之间的显著交互作用。这一发现为制定更智能的航拍计划提供了指导意义:不应孤立地考虑单个参数的影响。
3. 预测模型与策略: 建立了初步的回归预测模型,并提出了基于精度需求的分级优化配置建议。研究强调,在无人机航拍作业中,应将足够的影像重叠率作为补偿其他不利因素(如 GSD 变大)的首要且有效的手段。本研究基于实验结果构建了多元线性回归模型,为在不同精度需求下优化航拍配置、平衡作业效率与模型质量提供了数据支撑和决策依据。
参考文献:
1.李德仁, 李明, 李欣, 等. 轻小型无人机遥感发展现状与挑战[J].武汉大学学报(信息科学版), 2014, 39(5): 505-513.
2.张永生, 姜湖, 刘军. 无人机倾斜摄影的城市三维建模精度评价[J].测绘学报, 2016, 45(11): 1319-1327.
3.袁宏永, 谢宜峰, 黄长军. 无人机航摄参数对实景三维模型质量的影响分析[J]. 测绘科学, 2020, 45(8): 118-125.
4.张凯, 王栋, 孙钰峰, 等. 相机倾角对倾斜摄影测量三维建模精度的影响研究[J]. 国土资源遥感, 2019, 31(4): 59-65.
5.刘帅, 李清泉, 陈奇, 等. 复杂地形环境下无人机摄影测量精度控制与优化[J]. 测绘通报, 2021, (3): 6-11.

 京公网安备 11011302003690号
京公网安备 11011302003690号


