



- 收藏
- 加入书签

基于分层模糊控制算法的检测、除垢管道机器人
 打开文本图片集
打开文本图片集
摘要:本研究聚焦于开发一种基于分层模糊控制算法的管道机器人,旨在有效执行检测和除垢任务,以应对复杂管道环境中存在的挑战。通过采用先进的分层模糊控制技术,本研究设计了一套完整的系统,包括机器人机械结构设计、传感器系统集成及数据融合技术,以确保机器人能够高效、准确地完成管道内部的检测和清洁工作。实验验证显示,该管道机器人在多种复杂环境下均展现出了优异的性能,能够有效识别并处理管道内的各种障碍和污垢,显著提高了检测和清洁的效率与安全性。
关键词:管道机器人;分层模糊控制算法;检测与除垢;传感器系统;数据融合
管道运输作为一种重要的工业运输方式,在化工、石油等行业中占据着不可替代的地位。随着运输需求的不断增长和管道运输系统的日益复杂化,管道的维护与清洁工作变得尤为关键。传统的人工检测方法存在安全隐患和效率低下的问题,迫切需要一种高效、安全的管道检测与维护解决方案。本研究基于分层模糊控制算法,开发了一款新型管道机器人,通过集成高级传感技术和精密机械结构,实现了对复杂管道环境中障碍和污垢的高效识别与清除,为管道维护工作提供了新的技术方案。
一、研究背景及理论基础
(一)管道机器人的研究现状及其局限性
在全球工业化进程中,管道作为输送油气、化工产品等重要手段,对于经济发展和社会稳定起着至关重要的作用。随着工业需求的增长和管道系统的扩展,管道的检测与维护工作显得尤为重要。传统的管道检测方法,如人工直接检查和基于简单机械装置的检测,存在安全风险高、效率低下等问题,难以满足当前工业生产的需求。因此,管道机器人技术的研究和应用受到了广泛关注。
过去几十年里,管道机器人的研究取得了一系列进展。国内外研究机构和高校通过不断的技术创新,开发了多种类型的管道机器人,如轮式、履带式和蠕动式等,能够在不同环境和管道中进行移动和检测。这些机器人能够执行管道的视觉检测、超声波探伤以及清洁作业等任务,有效提高了管道检测的安全性和效率[1]。
然而,尽管已有的管道机器人在某些领域已经展现出良好的应用潜力,但仍存在一些局限性。首先,现有的管道机器人在复杂环境下的适应性和灵活性不足,面对管道内部的多变条件和未知障碍时,仍然容易出现卡顿或无法正常工作的情况。其次,部分管道机器人的控制系统尚不够完善,导致其在执行任务时的准确性和稳定性有待提高。此外,目前的管道机器人多依赖于预设程序进行操作,缺乏足够的智能化水平,无法实现复杂环境下的自主决策和灵活响应。
(二)分层模糊控制算法的基本原理和优势
分层模糊控制算法是一种先进的控制策略,该算法通过模仿人类的决策过程,可以实现对复杂系统进行有效控制。其核心思想是将复杂的控制问题分解为若干个子问题,每个子问题由一个模糊控制器负责,通过模糊逻辑推理实现对被控对象的精确控制。这种算法的优势在于其对复杂环境的高适应性和对不确定性因素的强鲁棒性。
分层模糊控制算法的另一个显著特点是其模块化设计,使得控制系统易于扩展和修改。在管道机器人的应用中,分层模糊控制算法可以有效处理由于管道环境多变引起的各种不确定性问题,如变径、弯曲、分支等,通过对机器人各个运动部分的精细控制,可以保证机器人在复杂管道环境中稳定运行和高效完成任务[2]。
此外,分层模糊控制算法具有良好的自学习能力和适应性,可以根据管道环境和任务要求自动调整控制策略,使管道机器人在遇到未知障碍或复杂地形时,仍能保持高效的检测和清洁性能。此算法的灵活性和智能化程度,为解决传统管道机器人面临的局限性提供了有效的技术途径。
二、系统设计与实现
(一)系统总体设计
本研究的管道机器人采用了分层模糊控制算法作为核心控制策略。系统总体设计包括四个主要部分:机器人机械结构设计、分层模糊控制算法设计、传感器系统及数据融合技术的应用、人机交互接口的开发。这四个部分相互协作,确保管道机器人能够在复杂的管道环境中稳定运行,并高效完成检测和清洁任务。
机器人的机械结构设计充分考虑了管道环境的多样性,采用了可变径的行走机构和灵活的操作臂,以适应不同管径和复杂地形。分层模糊控制算法则为机器人的运动控制和任务执行提供了智能化的决策支持。此外,集成的传感器系统能够实时监测管道内部情况,并通过数据融合技术提高检测数据的准确性和可靠性。人机交互接口的开发则可以让操作人员监控机器人状态,及时调整作业策略。
(二)分层模糊控制算法设计
分层模糊控制算法的设计是本研究的核心。该算法根据管道机器人的任务需求和环境特性,将控制系统分为多个层级,每个层级负责不同的控制任务,如行走控制、避障控制、检测控制等。通过模糊逻辑对各层控制规则进行优化,使算法能够根据实时数据做出最合适的控制决策,提高管道机器人适应复杂环境的能力[3]。
在算法设计过程中,特别注重算法的实时性和鲁棒性。为此,采用了高效的模糊推理机制和自适应调整策略,确保算法在管道环境突变时仍能保持高效稳定的控制性能。此外,算法设计还考虑了与传感器系统的紧密结合,通过对传感器数据的实时分析和处理,进一步提升管道机器人的检测和操作准确性。
(三)机器人机械结构设计
管道机器人的机械结构设计旨在实现良好的适应性和操作灵活性。机器人采用模块化设计,主要由行走模块、操作模块和控制模块组成。行走模块根据管道的直径和形态,设计了可变径的机械结构,能够自适应300mm至800mm不等的管径,确保机器人在不同尺寸的管道内部稳定行走。此外,为了提高机器人在复杂地形中的适应性,如通过弯道、分支等,行走模块还配备了灵活的关节和可伸缩的轮胎,以适应管道内部的多样化地形。
操作模块则主要负责完成检测和清洁等任务,包括但不限于超声波探头、视觉摄像头、清洁刷等。这些工具的设计考虑到了管道内环境的特殊性,例如,超声波探头用于检测管壁的裂缝和腐蚀情况,视觉摄像头用于实时传输管道内部的图像,清洁刷则用于去除管道内壁的沉积物。
控制模块是整个管道机器人的大脑,负责协调行走模块和操作模块的工作,实现复杂任务的执行。控制模块内部集成了分层模糊控制算法,通过处理来自传感器系统的数据,实时调整机器人的行为策略,以适应不断变化的环境和任务需求。
(四)传感器系统及数据融合
传感器系统是管道机器人感知外部环境和自身状态的重要组成部分,包括位姿传感器、超声波传感器、视觉传感器等。这些传感器能够提供机器人所需的各种信息,如管道内壁的结构特征、前方障碍物的位置和大小、机器人的当前位置和姿态等。
为了提高传感器数据的准确性和可靠性,研究中采用了数据融合技术,通过算法对来自不同传感器的数据进行综合分析和处理,从而获得更加精确和全面的环境信息。数据融合不仅可以提高检测数据的准确度,还能有效降低环境噪声和传感器误差对机器人性能的影响。
三、实验验证与结果分析
(一)实验设计与执行
为了全面评估基于分层模糊控制算法的管道机器人在检测和除垢方面的性能,我们设计了一系列实验,旨在模拟管道机器人在实际管道环境中的工作情况。实验分为三个阶段:管道环境模拟、机器人导航与避障、以及检测与除垢性能测试。
在管道环境模拟阶段,我们构建了一个模拟管道系统,该系统包括直管段、弯管段和带有不同类型障碍物(如沉积物、裂缝等)的管段,以模拟复杂的管道环境。在机器人导航与避障阶段,管道机器人被要求自主通过模拟管道系统,期间需自动识别并避开障碍物,测试其导航和避障能力。在检测与除垢性能测试阶段,评估机器人在识别管道内壁裂缝、腐蚀点以及完成清洁任务的效率和效果[4]。
(二)控制效果评估
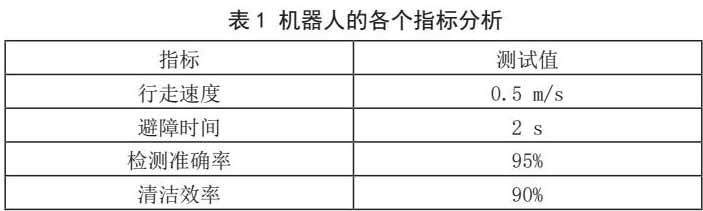
为了系统评估分层模糊控制算法在管道机器人控制方面的效果,我们采集了机器人在模拟管道环境中执行任务的数据,包括机器人的行走速度、避障时间、检测准确率和清洁效率等关键指标。具体如表1所示:
从实验数据中可以看出,管道机器人在分层模糊控制算法的指导下,展现出了良好的导航和避障能力,平均行走速度达到了0.5米/秒,避障时间仅为2秒,这表明机器人能够迅速反应并适应复杂的管道环境。在检测任务中,机器人的检测准确率高达95%,能够有效识别管道内壁的裂缝和腐蚀点。在清洁任务中,清洁效率达到了90%,说明机器人能够高效去除管道内的沉积物,提高管道的使用寿命和安全性。
(三)结果讨论与优化方向
实验结果显示,基于分层模糊控制算法的管道机器人在复杂管道环境中表现出了优异的导航、避障、检测和清洁性能。这些成果证明了分层模糊控制算法在提高管道机器人适应复杂环境、执行复杂任务方面的有效性。然而,我们也认识到,尽管当前的性能已经较为满意,但仍有进一步优化的空间。
在后续的研究中,我们计划从以下几个方面进行优化:首先,进一步提高传感器的精度和鲁棒性,以增强机器人在极端环境下的检测和操作能力;其次,继续优化分层模糊控制算法,特别是在处理复杂多变量控制问题时的效率和准确性;最后,探索机器人自我学习和环境适应能力的提升方法,使其能够在未知或变化的环境中更加独立和灵活地工作。在传感器精度提升方面,可以考虑采用更高分辨率的图像传感器和更灵敏的超声波探测设备,以提高检测的细节识别能力。同时,通过引入先进的数据融合技术,可以进一步提升不同类型传感器数据综合应用的效果,从而提高机器人的整体性能。
四、应用场景与未来展望
(一)化工与石油工业中的应用
在化工与石油工业中,管道是输送原料和产品的重要工具,其安全、高效的运营对于整个行业的稳定运行至关重要。基于分层模糊控制算法的管道机器人,以其优异的检测和清洁能力,为这些行业提供了新的解决方案。在化工厂,由于原料和产品的多样性,管道经常面临腐蚀和堵塞的问题。管道机器人可以定期对管道进行检测,及时发现裂缝、腐蚀点和堵塞,大大降低了因管道问题导致的生产事故和维修成本。在石油工业中,由于输送距离长、环境复杂,对管道的监控和维护提出了更高要求[5]。管道机器人能够在这些长距离、复杂环境下稳定工作,保障油气输送的安全和连续性。
(二)管道机器人的学术价值与社会影响
管道机器人的研究和应用不仅具有重要的学术价值,还对社会发展产生了积极影响。学术上,管道机器人设计和控制算法的研究推动了机器人技术、自动控制理论和人工智能等领域的发展。通过解决实际应用中的问题,促进了理论研究成果的转化。应用上,管道机器人的应用提高了工业生产的安全性和效率,尤其是在化工和石油等关键行业,有助于保障能源供应的稳定,减少环境污染,促进了可持续发展。此外,随着技术的不断进步和应用领域的扩大,管道机器人还有望在城市供水、污水处理等民生领域发挥重要作用,提高城市运营的智能化水平,改善人民生活质量。
(三)技术发展趋势与研究方向
展望未来,管道机器人技术的发展趋势将表现在智能化、模块化和网络化等方面。智能化方面,通过集成更先进的感知、决策和学习算法,提高管道机器人的自主性和适应性,使其能够在更复杂的环境中独立作业。模块化方面,发展通用化的模块和接口,提高机器人的灵活性和可维护性,简化定制和升级过程。网络化方面,实现管道机器人的远程监控和协同作业,提高作业效率和安全性。研究方向上,将重点关注管道机器人的环境适应性研究、新型传感器和材料的应用、以及基于大数据和人工智能的控制算法优化,以适应日益复杂多变的应用需求,推动管道机器人技术向更高水平发展。
总结
面对工业管道维护的挑战时,采用高度智能化的管道机器人不仅是对传统方法的技术升级,也是对未来工业自动化和智能化趋势的响应。通过集成分层模糊控制算法,我们能够实现对管道机器人更加精准和灵活的控制,提高其在复杂环境下的操作效率和安全性。此外,管道机器人技术的发展,特别是在化工与石油等关键行业的应用,不仅为这些行业的可持续发展提供了强有力的技术支持,也为促进社会经济的稳定增长和环境保护作出了积极贡献。
参考文献:
[1]陈宣烽,邹大鹏,陈少伟,等. 管道机器人超声测量轮廓重建方法的研究 [J]. 机床与液压, 2024, 52 (05): 74-79.
[2]苗翰文,张增猛,孙昊,等. 管道机器人取能模块建模与几何参数仿真分析 [J]. 液压与气动, 2024, 48 (03): 31-35.
[3]Falk M . 利用管道机器人更加经济地焊接管道 [J]. 现代制造, 2024, (02): 39-40.
[4]程航,喻九阳,戴耀南,等. 油-气管道检测机器人技术现状及展望 [J]. 武汉工程大学学报, 2021, 43 (03): 324-333.
[5]王宁. 基于分层模糊算法的管道机器人过弯控制研究 [J]. 内蒙古煤炭经济, 2019, (18): 200+202.
作者简介:
周娟(1985.10-),女,汉族,湖南浏阳人,硕士研究生,副教授,研究方向:人工智能。

 京公网安备 11011302003690号
京公网安备 11011302003690号


