



- 收藏
- 加入书签

金银花采摘机器人视觉引导下的自动化动作规划与实时反馈机制
 打开文本图片集
打开文本图片集


摘要:金银花收获机器人是农业生产中的一项重要研究内容,它是实现自主运动规划的一种有效手段。本项目拟在前期研究基础上,采用计算机视觉技术,通过对金银花植株的生长状况进行实时监测,实现对金银花成熟植株的精确定位与辨识,从而达到高效采收的目的。本项目拟研究并设计一种基于图像采集、特征提取和运动规划的自动过程,以实现复杂环境下的机器人精确采摘。同时,构建基于传感信息的作业过程动态反馈机制,实现对作业过程的动态反馈,并对作业策略进行动态调整,提升作业效率与作业品质。本项目研究成果可有效提升金银花采收效率,为推进智慧农业发展奠定基础。
关键词:金银花;采摘机器人;视觉引导;自动化动作规划;实时反馈
忍冬属植物因其特有的药用价值而备受关注,但传统的手工采收方法效率低、劳动强度大。近年来,随着农业科技的不断发展,采用基于视觉导航的金银花采收机器人已成为提高生产自动化程度的发展方向。通过对花卉进行实时分析,可以为机器人提供对周围环境的直接感知,进而进行精确的运动规划。本项目拟将机器视觉和机器人技术相融合,以适应现代高效农业生产模式的需要,探索适合现代农业生产模式的自动采摘方法。
一、金银花采摘机器人的系统设计
(一)机器人总体结构与工作原理
金银花采摘机器人的系统包括视觉、传感、机械臂、电源和控制器等多个部分,机器人采用了一个中心控制器,通过各个模块的协作来完成对果实的自动采摘。同时,设计了一套高精度的抓取器,实现了对花卉的准确抓取和采摘。本项目拟采用高分辨率摄像机对金银花进行采集,并对其进行视觉处理,实现对花朵成熟度、位置及姿态的准确判断,并与温度、湿度等传感器相结合,实现对采摘行为的实时调控。控制器主要负责采集、处理各个模块的信息,并依据外界环境及植株生长情况,对机器人做出相应的调节,保证准确、有效地完成采收任务。在作业过程中,机器人通过对周边环境进行扫描,获得植株的位置、状态等信息,再由传感系统对其进行力、距离等信息进行反馈,再由控制器对其进行分析、处理,从而完成对植株的自主采摘[1]。
(二)视觉系统的构建与功能描述
利用高分辨率的摄像机对金银花植株进行图像采集,并利用光学传感技术对其进行实时检测。金银花采摘机器人系统采用图像分割和特征提取的方法,对金银花的形状、颜色、大小以及它们之间的相对位置进行了分析,该方法通过对模型进行训练,使其在不同光照、不同角度的情况下,对图像进行精确的识别。金银花采摘机器人系统的主要功能包括三个部分:首先是对物体进行探测和定位,以保证机器人手臂能精确地识别和确定花的中心位置;第二,花龄判定,根据花种的色泽、形状等特征,自动判定花种是否符合采收条件;第三,通过机器人的视觉感知,建立机器人的运动轨迹,避开障碍物,保证机器人的运动轨迹。该系统可使机器人在复杂多变的环境下,对花卉进行快速、精确的辨识,并做出相应的反应,达到高效率的采收。
(三)传感器选择与数据采集方法
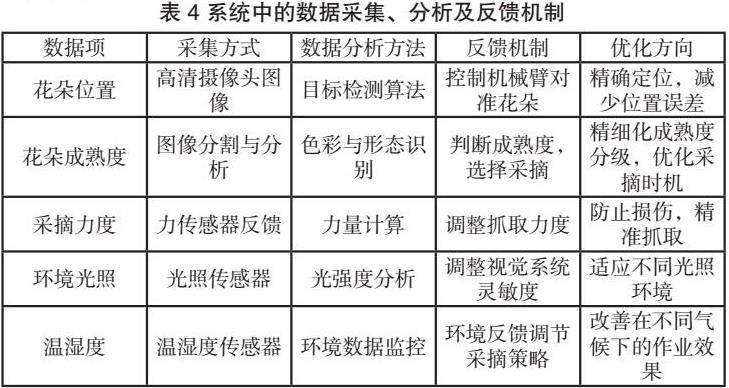
金银花采摘机器人系统采用力、光、温、湿度、测距等多个传感器,对采集过程中的各项参数进行实时反馈。机器手臂上装有力传感器,可对花所受的压力进行实时监测,以避免过度用力造成花的损坏或掉落。照明传感器通过对外界光线强度进行实时监控,从而调整视觉系统的敏感度,保证在各种照明情况下正常工作。利用温、湿度传感器对环境温湿度进行监测,并据此对采摘方案进行优化,以规避恶劣天气对采收品质的不利影响。利用距离传感器对环境中的障碍物进行检测,以帮助机器人完成准确的路径规划与避障。同时,传感器通过与中央处理器相连,将检测到的数据传输到控制器中[2]。
二、金银花采摘机器人视觉引导下的自动化动作规划
(一)图像处理与花朵识别算法
以金银花为研究对象,采用先进的图像分析方法,实现对金银花长势的准确识别,并据此制定适宜的采收策略。图像处理的首要步骤就是对采集到的图像进行预处理。为了提高图像的精度,对图像进行了降噪、增强和归一化处理。通过高斯模糊、直方图均衡等方法,提高了图像的清晰度,增强了对比度。同时,本项目拟采用卷积神经网络等深度学习技术,对图像进行分类。该方法首先利用卷积网络抽取图像中的颜色、纹理、形状等关键特征,然后层层递进,最后得到分类效果。
从表中可以看出,光照条件对图像处理与花朵识别算法的影响显著。在光照条件良好的情况下(条件A),图像清晰度达到9,识别成功率高达95%。此时,处理时间为1.2秒,错误识别数量仅为2,显示出算法在充足光照下的高效性能。然而,随着光照条件的降低,图像清晰度下降,识别成功率也随之降低。条件C光照不足时,识别成功率仅为70%,处理时间增加至2秒,错误识别数量飙升至10,表明在低光照环境下算法对图像特征捕捉的准确性显著下降[3]。
(二)动作规划模型的构建与优化
在前期工作的基础上,以金银花生长状况、目标位置、周边障碍等为基础,建立多维度运动规划模型。在该模型中,利用 A*、 Dijkstra等启发式算法,对从目前地点到花的最优路线进行规划。另外,该方法还能与运动学模型相结合,对机器人的运动轨迹进行实时求解,从而保证了机器人运动的流畅与稳定。
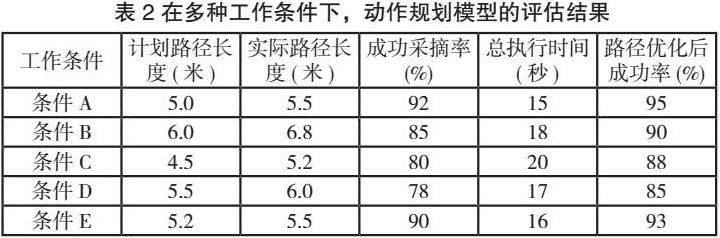
从表格中可以看出,在不同工作条件下,计划路径长度与实际路径长度之间的差异反映了模型优化的必要性。在条件A中,计划路径长度为5.0米,实际路径为5.5米,成功采摘率达到92%。这表明在大部分情况下,模型能够较好地规划路径。然而,条件B和条件C的成功采摘率较低,说明在复杂环境中,路径规划存在一定的改进空间,尤其在障碍物较多的情况下,实际路径长度明显增加。
(三)规划策略与执行流程细节
首先,在采集过程中,机器人利用摄像机对金银花植株进行实时采集,利用深度学习技术对植株进行自动识别,从而判断植株的位置及成熟度。这一步的顺利进行,首先要对花卉进行精确的辨识,然后再进行特征提取。然后,通过对运动轨迹的分析,将运动轨迹信息反馈给中心控制器,进行轨迹规划。同时,提出了一种新的路径规划方法—— A*法和迪杰斯特拉法。同时,利用采集到的花的位置信息,确定从目前的位置到采摘点之间的最佳路径。同时,结合环境中的障碍物和地形的变化,对机器人的运动轨迹进行了实时的修正。然后根据运动学模型求出期望的运动轨迹及速度,从而保证了运动的顺利进行。
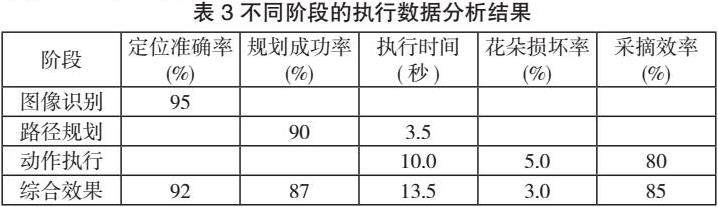
从表格中可见,在图像识别阶段,定位准确率达到95%,这为后续的路径规划打下了良好基础。路径规划阶段的成功率为90%,执行时间控制在3.5秒,表明机器人能够快速生成有效路径。动作执行阶段,总体执行时间为10秒,花朵损坏率为5.0%,采摘效率为80%。综合效果分析显示,整体流程的准确率和效率能够有效提升金银花的采摘效果[4]。
三、金银花采摘机器人视觉引导下实时反馈机制的设计与实现
(一)反馈机制的总体框架
反馈机制将机器人视觉、传感器反馈和数据分析相结合,实现对果实采收各个环节的实时调节。本项目以金银花为研究对象,采用高清晰度摄像机对金银花的花朵进行定位、识别和分析,并利用深度学习等方法,对金银花的成熟度、大小、位置等进行实时判定,为金银花的准确定位。此外,该机器人还装备有力传感器、加速度计、温湿度传感器等多种传感器,可以对采摘过程中的抓取力、花朵的受力和周围的环境进行实时监控,保证机器人在不损坏花朵的前提下,准确地完成作业。同时,建立了数据分析和实时调节的反馈机制,以提高系统的总体运行效率。该机器人利用中央处理器(CPU)对采集到的采集信息进行快速的分析和处理,并结合具体的花卉状况及环境因子,实现对采摘路径、采摘力度及作业时间的自动调节。在此过程中,机器学习算法也起到了很大的作用,通过采集任务的反馈信息,对采集方案进行自动学习和不断完善。
(二)数据采集与处理流程
首先,利用高清晰度摄像机对金银花进行实时采集,并利用计算机视觉对其进行图像处理,并对其部位、大小、成熟度等特征进行分析。同时,将采集到的影像资料导入到影像辨识系统中,由深度学习来辨识花的位置及成熟程度,以协助作业者完成采收作业。同时,该机器人还搭载了力、温、湿度、光照等传感器,对采摘过程中的力、光、湿度、温度等参数进行实时采集。在将传感器与影像资料同步传送至中央处理器后,由资料分析模组进行处理。首先,通过采集到的多个传感器信息,实时监控其工作状态,如抓取力度、机械手位置等,确保在采摘时能够准确地抓取花卉,并防止其损坏。同时,通过对采集到的图像数据进行分析,可以对鲜花的成熟程度以及采收时间进行自动判定,以保证最优的采收时间。在环境信息处理方面,温湿度传感器可以辅助系统判定气候变化对植株生长的影响,例如气温过高或过低都会导致植株生长状况发生改变,从而实现对采收路线和采收强度的优化。
结语
实验表明,基于视觉导航的金银花采收机器人具有较好的实用性,可实现自动运动规划与实时反馈。通过精确的视觉辨识与灵活的运动调节,使其能够高效精确地完成采摘作业。进一步提高机器人的智能程度,使其能够适应不同的采摘环境,是今后研究的重点。
参考文献
[1]高国民.基于多源信息融合的红花采摘机器人田间导航系统研究[D].新疆农业大学,2023.
[2]汉永乾.金银花生物力学特性研究及采摘机器人设计[D].甘肃农业大学,2023.
[3]郑如新.基于双目视觉的金银花识别定位系统研究[D].南京林业大学,2022.
[4]郑如新,孙青云,肖国栋.基于机器视觉的金银花图像识别处理算法研究[J].中国农机化学报,2022,43(04):153-159.
[5]杨天歌,倪诗婷,高旭华,潘福璐,陶欧.基于电子感官和机器学习模型的混合金银花区分鉴别方法研究[J].特产研究,2021,43(03):19-22+27.
基金项目:河北省教育厅2021年河北省高校科学技术研究重点项目《金银花采摘机器人研究》(ZD2021314)

 京公网安备 11011302003690号
京公网安备 11011302003690号


