



- 收藏
- 加入书签

一种基于人工智能技术的油污池清理高级机器人模型设计思路
 打开文本图片集
打开文本图片集
摘要:目前各大油田采油厂有大面积的油污池,其中存在着大量油泥堆积,须定期清理油泥。人工清理油污池费时费力,效率低下。因此,本文拟提供一套能够自动上下油污池,在污泥油池内自行设计清理路线并按路线顺利运动,能够自动清洗及抽吸油泥的一体化机器人模型设计思路,提高油污池清理效率,将工人从油污池的恶劣工作环境中解放出来,解决目前油污池清理难题。
关键词:人工智能;清理机器人;自动控制
随着工业化的快速发展,油污池清理成为了一个重要的环保问题。传统的清理方式不仅效率低下,还存在安全隐患和环境污染风险。因此,利用人工智能技术设计和开发高级油污池清理机器人成为了解决这一问题的关键。本文拟提供一套能够自动上下油污池,在污泥油池内自行设计清理路线并按路线顺利运动,能够自动清洗及抽吸油泥的一体化机器人设计思路,整体结构以履带式小车为基础,装配水泵、喷水管和过滤设备等,对池壁以及池底进行冲刷以及抽吸过滤。基于人工智能技术,使机器人能够自行完成池内的无死角清理。
目前清理型机器人主要有:储油罐油泥清理机器人,采用机械推铲和高压水射流相结合的清理模式, 清理效果好,但对复杂工况的适应性以及运行中的自动化和智能化不强[1];海上油污清洁机器人,虽解决了油污清理的部分问题,但其清理效率仍然较低,技术不够成熟,没有完善的功能且其寿命有限[2];用于硫酸罐的污泥清洗机器人,虽提高了生产过程中的安全性,但机器人结构整体复杂,不具有便捷性[3];管道清理机器人则通过高清摄像头和多功能传感器进行实时检测管道内部情况,发现疏通难的部位,同时装备有强力水压系统,能够进行高效切割管道。然而,这类机器人的成本可能较高,且需要专业人员操作和维护.
进行这项研究不仅是为了解决油污池清理的难题,更是为了推动人工智能技术在环保领域的应用和发展。同时,该研究还具有环保、经济和技术意义,其环保意义就是有效减少油污对环境的污染,保护生态环境;经济意义是能够提高油污池清理的效率和质量,降低清理成本;而技术意义是能够推动人工智能技术在机器人领域的应用和发展。
1 机器人结构设计
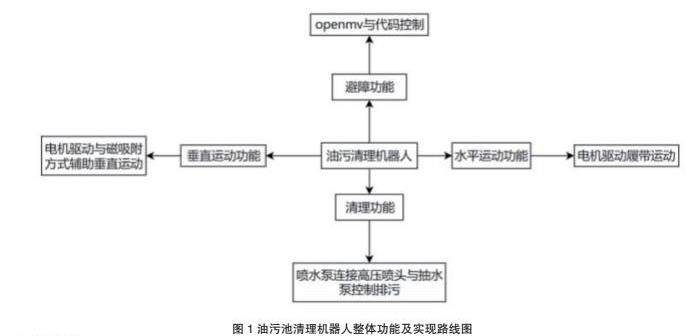
以磁吸附履带式小车为基本架构,基于STM32嵌入式开发技术实现油污清理机器人的各项功能。装配水流控制系统(喷水泵、抽水泵、高压喷头)以实现油污池的清理与油污水抽取,加装OpenMVH7对油污进行识别,并向STM32传输油污位置的信息数据,再通过STM32的代码控制以实现避障和路线规划功能,通过电机驱动与磁吸附方式辅助实现垂直爬壁功能。
1.1 机械结构
机器人机械结构由驱动系统、水流控制系统、机器人释放和回收系统及油污识别系统组成。
1.1.1驱动系统
通过电机模块驱动齿轮运转,并在齿轮外缘套上履带,以实现小车的运动功能,在履带上贴附凸起点增大摩擦系数以更好地实现垂直爬壁功能。通过STM32芯片编写代码设置机器人的行走路线和初始速度,当机器人发现油污时则会脱离原来行走路线进行油污清理工作,清理结束会原路返回,继续按照原定行走路线寻找油污,达到精准控制机器人的运行轨迹的目的。
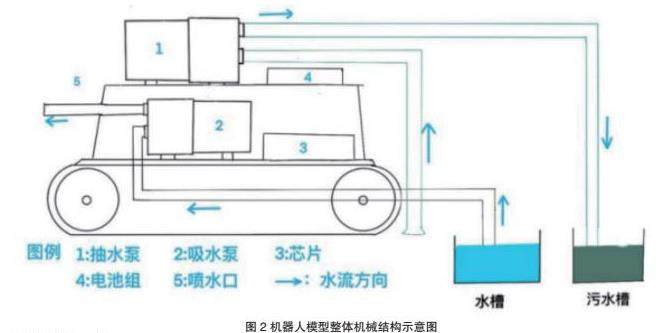
1.1.2水流控制系统
外置喷水泵和抽水泵,车身连接喷水管和抽水管。喷水泵一端连接喷水管,喷水管连接高压水枪头,提供高压水流,以搅拌池底油水混合物;喷水泵另一端通过水管连接水槽,用以提供清水;抽水泵一端连接抽水管,搅拌后的油水混合物经车底的抽水管抽出至车后的过滤装置,过滤后的油水混合物再通过抽水管进入抽水泵中;抽水泵另一端通过水管通向污水槽以实现清理池底油污残渣的功能。
1.1.3机器人释放和回收系统
机器人通过电机驱动与磁吸附方式并配合履带上贴附的凸起点实现辅助垂直爬壁,实现机器人自动进入油污池和驶出油污池的功能。
1.1.4油污识别系统
使用OpenMVH7摄像头采集图像。通过OpenMVH7的图像处理算法对采集到的图像进行分析,尝试识别油污区域。将油污识别的结果以及可能的图像数据传输给 STM32。接收来自OpenMVH7的油污识别信息数据,根据油污信息,制定自动移动策略,以控制电机实现机器人的移动。
1.2 电路结构
采用STM32单片机对机器人进行整体控制,通过STM32开发板的引脚连接了电机驱动模块、水流控制模块、OpenMVH7模块等各个功能模块。利用模拟电路等知识完成电路的设计以及开发,通过模数信号的转换方式实现对机器人行为的自动实时控制,通过STM32单片机的I/O口来传输模型机器人运行过程中传感器探测到的各种实时数据,下达STM32单片机对各个模块作出的相应指令,以对机器人行为运行进行及时修正。
2 程序设计思路
本部分将介绍油污识别程序设计思路与机器人运动程序设计思路
2.1油污识别程序设计思路
采用OpenMV IDE软件进行代码编写,首先对OpenMVH7摄像头进行初始化配置,关闭白平衡设置,以更准确识别油污目标图像;通过调整二值化图像,确定目标油污点颜色参数,将其输入至颜色识别程序;OpenMVH7识别到目标油污点后将计算目标油污点位置坐标值,并将其传送至PID控制程序中进行进一步处理。
2.2机器人运动程序设计思路
OpenMVH7获取目标油污点位置坐标值后,将其传送至PID控制程序中,计算出小车当前左右轮转速,以控制小车前进方向。当视野内无目标油污点时,小车将按照预先程序设计路线进行油污点循查。
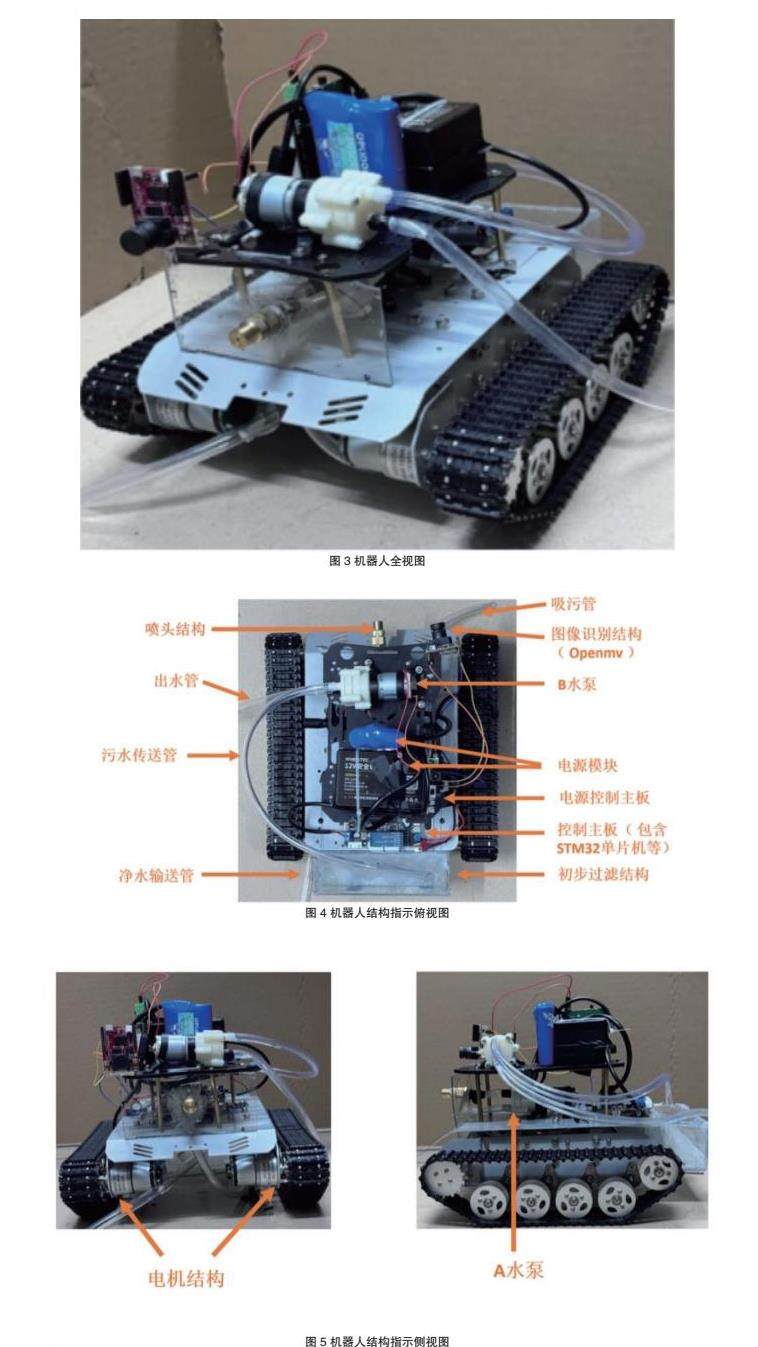
3 实物模型展示
以下为小车机械结构实物模型展示。
4 结语
本研究通过融合人工智能技术与机械工程创新,构建了一套面向油污池场景的智能化清理机器人系统。该设计以磁吸附履带式小车为承载平台,集成STM32嵌入式控制系统、OpenMVH7视觉识别模块及双模水流控制单元,实现了油污池的自主导航、精准识别与高效清理三大核心功能。相较于传统人工清理方式及现有同类机器人,本系统通过"感知-决策-执行"闭环架构,显著提升了复杂油污池环境下的作业效率与安全性。
参考文献:
[1] 邓三鹏,李充宁,张兴会等.储油罐油泥清理机器人[J].油气田地工程,2011,30(04):100-101.
[2] 时浩章,姚忠国,刘洋等.基于海面油污清理的新型海上油污清洁机器人[J].清洗世界,2022,38(06):35-37.
[3] Tae Gyoon Lim and Soon Geul Lee. A Sludge Cleaning Robot for Sulfuric Acid Tank[J]. Advanced Engineering Forum, 2011, 1598(2-3) : 419-422.

 京公网安备 11011302003690号
京公网安备 11011302003690号


