



- 收藏
- 加入书签

海上风电场风养融合海洋牧场水下机器人的应用与发展
摘要:近年来,随着海洋风电场的快速发展,将风力发电与水产养殖相结合(风养融合)成为了一种新型海洋资源开发模式。相较于传统水下作业方式,海洋牧场水下机器人在作业模式、覆盖范围及适应能力上展现出显著优势。它们能够应用于水质监测、目标识别与定位、高精度水下导航、智能控制的精准作业,有望推动水产养殖业向智能化转型。近年来,水下机器人技术取得了显著进步,然而,在水产养殖业中的应用仍然有限,面临一些技术上的挑战。本文深入剖析了这些关键技术,并展望了其未来发展趋势,为水产养殖水下机器人的研发与应用提供参考。
关键词:海上风电场;风养融合;海洋牧场水下机器人; 水质监测; 目标识别定位; 智能规划控制
Abstract:In recent years,with the rapid development of offshore wind farms,the integration of wind power generation with aquaculture(referred to as wind-aqua integration)has emerged as a new model for the development of marine resources. Underwater robots for marine ranching play a significant role in this development model.Compared to traditional underwater operations,underwater robots for marine ranching have distinct advantages in terms of operation methods,scope,and adaptability. They can be applied to water quality monitoring,target identification and positioning,high-precision underwater navigation,and precision operations with intelligent control,potentially driving the transformation of the aquaculture industry towards intelligence.Although underwater robot technology has made significant progress in recent years,its application in the aquaculture industry is still limited and faces technical challenges.This article provides a detailed analysis of these key technologies and discusses future development directions,offering a comprehensive reference for the research and application of underwater robots in aquaculture.
rds:Offshore Wind Farm;Wind-Aqua Integration;Underwater Robots for Marine Ranching;Water Quality Monitoring;Target Identification and Positioning;Intelligent Planning and Control
1. 国内外研究现状
海上风电场作为一种清洁可再生能源设施,通过高效利用海洋风能实现发电,可显著降低对化石燃料的依赖,减少温室气体排放,对缓解全球气候变化具有重要作用。在此背景下,风电场与水产养殖的协同开发(即" 风养融合 " 模式)能够实现海域空间资源的立体化利用,有效避免传统养殖对海洋生态空间的额外占用。在该模式中,海洋牧场水下机器人系统通过自动化投喂、网衣清洁、鱼群行为监测等智能化作业,不仅大幅降低人工干预需求,更在养殖效率与作业安全性方面实现双重提升。
在技术应用层面,鳍源科技联合华为、中国移动等企业开发的 AI-5G 融合水下机器人系统具有代表性。其 "5G+ 海洋牧场 " 智能解决方案通过 FIFISH 系列机器人搭载的高清影像传感系统,依托 5G 网络超低时延特性实现海底数据实时回传,经岸基数据中心进行多模态分析后形成决策闭环。实践表明,该技术已在中国本土及澳大利亚 AFE 养殖基地、阿拉斯加珍珠养殖场、挪威三文鱼养殖场等国际场景成功应用,推动传统渔业向数字化养殖模式转型。
国际同类技术中,澳大利亚 SoSub 公司开发的专用 ROV 系统具有技术特色。该公司与 Formlabs 合作采用选择性激光烧结(SLS)3D 打印技术,以高性能树脂材料制备机器人防水部件,在保证结构强度的同时实现毫米级的尺寸精度,这种模块化制造方案不仅能提升网具的维护效率,也能够降低其维护成本。海洋牧场水下机器人的应用将极大地提高养殖效率,优化资源配置,推动水产养殖业向智能化、自动化的方向发展,为构建可持续发展的水产养殖模式奠定了坚实基础。
接下来,本文将对海洋牧场水下机器人的核心技术进行深入探讨。
2. 海洋牧场水下机器人关键技术
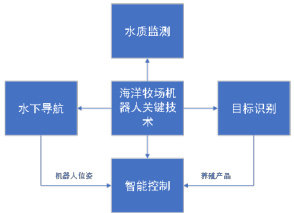
在严苛的水域环境中,海洋牧场水下机器人需克服水质监测、水产目标辨识与定位、水下路径规划、以及智能操控等核心挑战,以实现高效且精确的水产养殖监测与作业。如下图所示[6]。
2.1 水质监测
海洋牧场水下机器人作为智能化水质监测平台,其应用显著提升了监测工作的空间覆盖能力、作业灵活性和数据采集效率。然而,在实际运行过程中仍面临若干技术挑战:首先,受机器人本体空间限制,传感器搭载数量有限,需通过优化传感器性能参数和空间布局设计来提升监测效能;其次,长期水下作业环境下,传感器探头易受生物附着和沉积物堆积影响,导致测量精度下降甚至功能失效,这要求建立定期维护机制,而开发自动化清洁系统对保障传感器持续稳定工作尤为关键;此外,在空间条件允许的情况下,建议采用多传感器冗余配置方案以增强系统可靠性。
在数据处理层面,养殖环境的复杂性使得水质监测数据存在多重干扰因素:包括但不限于数据缺失、信号失真、信息冗余以及异常波动等问题,同时环境噪 扰尤为显著。针对这些挑战,需要构建完整的数据处理流程,实施包括噪声抑制、特征提取、数据修复和信号重构等关键技术环节,从而确保水质分析结果的准确性和可靠性。
2.2 目标识别
水产目标的精确辨识与定位是实现智能化、精准化养殖的核心技术之一。然而,由于养殖对象的随机分布、快速运动、生长形态多样性以及水体环境的复杂性,单一的目标探测方法往往难以满足实际需求。因此,需要结合多种传感手段,构建多模态融合的检测体系,以提高识别与定位的准确性和鲁棒性。
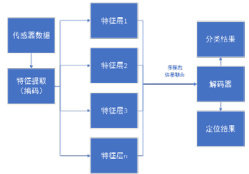
水产目标的识别与定位涉及图像预处理、特征提取、目标解析等多个关键环节。针对水下图像模糊、光照不均、目标遮挡等问题,传统方法往往难以实现高精度的分类与定位。为此,可采用多尺度特征融合网络模型,结合不同层级特征的表示能力,提升目标识别的准确性,模型框架如下图 2 所示。具体而言,该技术流程包括:(1)多模态数据融合:利用光学传感器、红外传感器等获取多源数据,通过信息融合技术增强目标表征能力。(2)多尺度特征提取:特征提取器从不同层级捕获目标的关键信息,如鱼类纹理特征、目标- 背景对比度、养殖设备差异等。(3)自适应特征融合:通过特定的融合机制,在多个尺度上整合多维特征,增强目标表征的鲁棒性。(4)解码与分类定位:在解码阶段,综合多尺度特征生成精细化的特征描述,最终实现像素级分类与高精度定位。
2.3 水下导航
在海洋牧场环境中,水下机器人执行任务时面临诸多不确定性因素,包括复杂的水流扰动、低能见度条件、动态变化的水压环境等。这些因素对机器 严峻挑战,要求其具备高精度的定位与路径规划能力,以确保任务执行的可靠性和稳 技术涵盖水声定位、水下视觉、SLAM(即时定位与地图构建)以及多水下机器人协同定位,但每种技术均存在其特有的优势与局限性,如表1 所示。
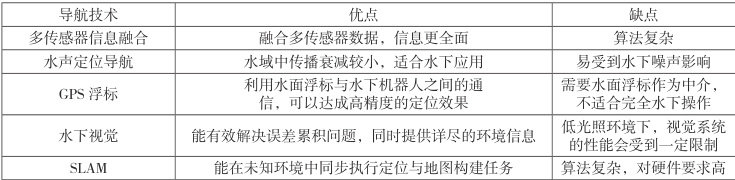

表1 各类导航技术优缺点
2.4 智能控制
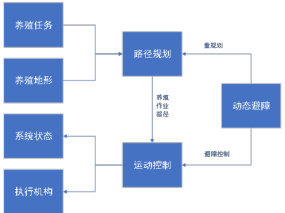
海洋牧场水下机器人的规划控制系统主要包含路径规划、动态调控及避障策略三大核心环节。路径规划旨在寻找机器人到达各关键区域的最佳路径;动态调控确保机器人在行进中适应环境变化,维持稳定状态;避障策略帮助机器人识别并绕开障碍物,顺利完成任务。这一系统化的规划与控制方式,对于提升水下机器人在复杂水下作业环境中的效率和安全性极为关键。其逻辑关系如下图所示。
其中路径规划是实现海洋牧场水下机器人智能控制的关键,近年来基于人工智能算法的路径规划技术兴起,通过模仿动物行为进行寻优设计,使用如粒子群算法、蚁群算法、进化计算、遗传算法、神经网络、机器学习等智能算法进行路径规划,这些方法不需要精确的环境模型,具有强大的搜索能力。
海洋牧场水下机器人在运动控制方面面临多重挑战,包括非线性模型处理、流体动力学特性变化、负载变动、较大的附加质量和运动惯性, 复杂环境中的时变干扰。为有效应对这些内外环境的强烈扰动,所设计的运动控制器 鲁棒性控制能力。实际应用中,常采用PID 控制、自适应控制、滑模控制、反演控制、模糊逻辑控制及神经网络控制等多种算法,以优化机器人的运行性能。
3. 展望
近年来,海洋牧场水下机器人技术取得了显著进步,并因其卓越的性能在水产养殖领域展现出巨大的应用潜力。然而,受成本及设备适用性等因素制约,这些机器人在实际养殖作业中的普及程度尚待提高。面对未来,海洋牧场水下机器人在监测和作业方面存在若干亟待克服的挑战:
(1)智能综合感知系统的构建:当前的监测技术面临监测方式单一、可靠性欠缺及灵活性不足等挑战。未来的发展方向是通过整合水下机器人、无人机、传感器网络和物联网技术,建立一个多维度的探测网络。这个网络能够从空中、水面到水下全方位地进行监测,结合静态监测与动态巡检、远程监测与直接测量等多种方法,实现对养殖环境的智能化感知。在水面中部署多个通信基站(如浮标),与无人机、传感器系统实现全覆盖通信,增强系统稳定性与实时性。
(2)生理及行为特征的自动辨识:海洋牧场水下机器人搭载声呐、激光等探测装备,融合声学、光学、电学技术,并运用模式识别与人工智能算法,能自动提取和识别养殖对象的类别、体重、尺寸、姿态及空间布局等特征,这些特征对养殖管理与流程优化有很重要的作用。
(3)经济高效的智能化设备研发:目前,海洋牧场水下机器人的成本相对较高,这对于普通养殖户而言是一个较大的经济负担,限制了其在水产养殖中的广泛应用。因此,开发成本效益高的成熟模块,并提高设备的集成度,是制造经济实用型智能化设备的关键。这将是推动水下机器人在水产养殖业中广泛应用的重要途径。
参考文献
[1]“5G+ 海洋牧场”成功应用 ! 鳍源 AI 水下机器人助力我国渔业养殖再升级 ![EB/OL].([2024-06-10]) 024-10-09].https://www.qysea.com/cn/media-center/5GQYSEACN.html.
[2]3D 打印水下机器人 : 精准应对深海维修挑战 [EB/OL].(2024-08-15)[2024-10-09].https://www.sohu.com/a/801031736_121212783.
[3]Shi C,Wang Q,He X,et al.An automatic method of fish length estimation using underwater stereo system based on LabVIEW[J].Computers and Electronics in Agriculture,2020,173.
[4]Li D,Wang Z,Wu S,et al.Automatic recognition methods of fish feeding behavior in aquaculture:A review[J].Aq uaculture,2020,528(prepublish).
[5] 周 建 龙 . 一 种 水 产 养 殖 机 器 人 :201811630761.X[P].2019-03-15.ZHOU J L.An aquaculturevehicle:201811630761.X[P].2019-03-15(in Chinese).
[6] 刘冠灵 , 卫泓宇 , 李志鹏 , 等 . 履带式深海网箱清洗机器人的设计 [J]. 机械制造 ,2019,57(4):11-14.LIU GL,WEI H Y,LI Z P,et al.Design of crawler-type deep-sea cage cleaning robot[J].Machinery,2019,57(4):11-14(in Chinesewith English abstract).
[7] 夏英凯 , 朱明 , 曾鑫 , 等 . 水产养殖水下机器人研究进展 [J]. 华中农业大学学报 ,2021,40(03):85-97.DOI:10.13300/j.cnki.hnlkxb.2021.03.010.
[8] 樊春春 . 基于物联网的水产养殖远程智能监控系统的设计 [D]. 合肥 : 安徽农业大学 ,2019.FAN C C.Design of remote intelligent monitoring system for aquaculture based on internet of things[D].Hefei:Anhui Agricultural University,2019(in Chinese with English abstract).
[9] 刘双印 . 基于计算智能的水产养殖水质预测预警方法研究 [D]. 北京 : 中国农业大学 ,2014.LIU S Y.Prediction and early-warning of water quality in aquaculture based on computational intelligence[D].Beijing:China Agricultural University,2014(in Chinese with English abstract).
[10] 皮 志 锋 . 海 参 捕 捞 机 器 人 技 术 研 究 [D]. 哈 尔 滨 : 哈 尔 滨 工 程 大 学 ,2017.PI Z F.Research on thetechnology of sea cucumber fishing robot[D].Harbin:Harbin Engineering University,2017(in Chinese with English abstract).
[11] 覃振权 , 孔令同 , 卢炳先 , 等 . 一种基于强化学习的水下机器人避障路径规划方法 :CN202210236892.X[P].CN202210236892.X[2024-06-26].
姓名:唐玉章 出生年月:1995 年8 月 性别:男
民族:汉 籍贯(省市):湖南省永州市
学历:硕士研究生
职称和研究方向:助理工程师- 海上风电规划设计

 京公网安备 11011302003690号
京公网安备 11011302003690号


