



- 收藏
- 加入书签

基于FPGA 的相控阵驱鸟设备
摘要:对传统声波驱鸟设备存在的声能分散、噪声污染大、响应速度慢及定向精度不足等问题,本文设计并实现了一种以现场可编程门阵列(FPGA)为核心的相控阵智能驱鸟系统。系统通过构建“感知 - 决策 - 执行”的闭环控制架构,利用 FPGA 的并行处理能力,实时计算并输出多路具有高精度相对延迟的音频信号至扬声器阵列,通过波束形成算法实现声波能量的定向聚焦与快速电子扫描。硬件上,完成了以 Xilinx Artix-7 系列 FPGA 为核心的处理板卡、 4×4 单元扬声器阵列及二维电控云台的集成;软件上,在 FPGA 内部实现了 SD 卡音频流读取、波束控制状态机。实验结果表明,本系统成功实现了声波波束在 ±45°范围内的电子偏转。该系统为机场、变电站等大范围、低干扰场景下的精准驱鸟提供了一种高效、智能的解决方案。
关键词: 驱鸟设备;声学相控阵;波束形成;FPGA ;智能控制;声场调控
中图分类号:TP273 文献标识码:B
前言
鸟群与人类生产生活空间的交叉重叠,对民用航空、电力输送及规模化农业生产构成了持续性的安全威胁与经济风险。例如,机场附近的鸟击事件严重危及飞行安全,而鸟禽触碰高压输电线路则可能引发区域性供电事故。因此,发展高效、可靠且人道主义的驱鸟技术具有重大的社会与经济价值 [1]。声学相控阵技术,源于雷达与声纳领域,通过电子方式控制阵列中各辐射单元信号的相位与幅度,利用波在空间的干涉原理,实现波束的定向发射与快速扫描,而无需任何机械运动。将该技术引入驱鸟领域,有望从根本上突破传统设备的能效与响应限制。现场可编程门阵列(FPGA)凭借其高度的并行处理能力、灵活的可重构特性以及纳秒级的定时精度,成为实现多通道相控阵实时信号处理的理想平台。它能够满足波束形成算法对多通道信号同步性与延迟精度的苛刻要求 [2-3]。
鉴于此,本文设计了一套用于相控阵天线的波束控制系统,其核心在于以 FPGA 芯片作为控制中枢。该系统充分利用 FPGA 强大的并行数据处理能力,实时计算所需的波控指令,并生成高精度的时序信号,以驱动移相器协同工作,最终实现对波束指向的精确相位调控。
一、相控阵声束原理
1.1 相控阵声束偏转原理
在阵列波束形成理论中,相控 何结构排列的多个独立辐射单元的激励信号参数,实现对波前传 可控的相位偏移或时间延迟于各个阵元,使得所有阵元辐射的 从而合成具有特定指向性的辐射主瓣。理论分析表明,偏转角 由阵元 同决定,其定量关系满足公式:sinθ=(c*△t)/d,其中c为介质 持该角度向前传播,从而实现超声波束在空间中的电子偏转,整个过程无需机械运 机制的示意图如图1 所示。
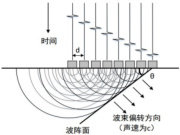
图1. 声相控阵声束偏转示意图
根据超声相控阵系统的结构参数,可推导得出各阵元激励信号所需的相对延迟时间。如图 2 所示,在已知阵列关键几何与传播特性的前提下,包括阵元中心间距 、总阵元数 +1 以及声波在介质中的传播速度 ,即可通过理论计算确定各通道的延时量[5]。
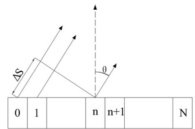
图2. 简化相控阵声束偏转示意图
基于图示的空间几何关系,可推导出相邻阵元发射的超声波至目标点的路径差为
△s=d*sin0_(1)
在该表达式中, 表示超声探头中相邻阵元间的波程差; 为相邻阵元中心点之间的距离;θ 代表超声波束偏转方向与阵列法线方向之间的夹角。基于公式 (2),可进一步计算得到第 个阵元相对于第 0 参考阵元的激励信号延迟时间。
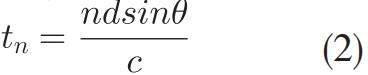
该数学模型中, tn 表示第 n 号阵元与参考阵元之间的激励信号延迟时间, 则代表超声波在特定介质中的传播速度。根据公式 (2) 的计算结果,可确定超声探头各阵元相对于参考阵元所需的延时量。通过将这组时序参数应用于阵列的激励控制,即可生成指向预设偏转角θ 的超声波束[7]。
1.2 相控阵声束聚焦原理
为实现一维线性阵列的声束聚焦 阵元施加特定的延时激励。具体而言,激励信号从阵列两端最外侧的对阵元开始启动,随后以预设的时间间隔依次激活其邻近单元,直至最中心的阵元最后被激发。此种时序设计使得各阵元辐射的声波在传播过程中相干叠加,合成一个等效的凹球面波前,该波前在继续传播时,其能量将汇聚于预设的焦点位置。图3 展示了该聚焦过程的波束形成示意图[8]
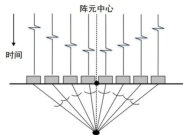
图3. 相控阵声束聚焦示意图
声束聚焦模式下各阵元延时量的计算,同样基于声波传播路径差原理进行推导。在阵列几何参数已知的条件下——包括阵元中心间距 d 、阵元总数 2N+1 以及超声波在介质中的传播速度 ,可建立如图 4 所示的几何关系模型用于理论计算。
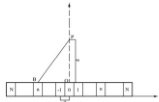
图4. 简化相控阵声束聚焦图
根据直角三角形 PBO 的几何关系,其中顶点 P 定义为声束的聚焦焦点,B 为第 n 个阵元的中心位置,0 为阵列中心的位置。
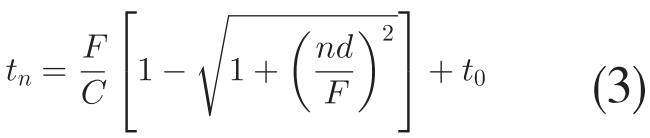
以上表达式中,参数 表示聚焦深度,即线段PO 的长度; d 为相邻阵元的中心间距;线段BP 的长度则代表第 个阵元到焦点 P 的声波传播路径。公式中引入的常量 是一个时间基准偏移量,用于保证通过公式计算得到的各个阵元延迟时间 均为正值[9]。
1.3 相控阵声束偏转聚焦
上述声束聚焦的理论推导基于焦点位于阵列中轴线这一理想条件。为进一步研究更普遍的声束控制场景,析焦点偏离中轴线的情况,即实现超声波束的偏转与聚焦复合控制。
如图 5 所示,考虑阵元总数为 2N+1 的超声阵列模型。当焦点 P 偏离阵列法线方向时,各阵元至焦点的声程将同时受偏转角θ 和聚焦深度 的影响。

图5. 相控阵声束偏转聚焦
在图 5 所示的三角形 OBP 中,顶点 P 对应声束的聚焦焦点,B 点为第 n 个阵元的几何中心,0 点则为参考阵元的中心位置。根据该三角形的几何关系,可推导出如下表达式:

上述公式中,各参数定义如下: 为聚焦深度(即焦点到阵列平面中心的垂直距离),d 是阵元中心间距,PB 代表第 个阵元中心到焦点 P 的直线距离。引入的常数项 是一个时间基准偏移量,其作用是保证由该式求解出的每个阵元的延迟时间 为正值。需要注意的是,此公式的推导前提是阵元总数(2N+1)为奇数。当阵列采用偶数个阵元时,为维持聚焦声场的对称性,需将公式中的阵元序号 修正为 ( +0.5)。最终,通过该修正后的公式,可精确计算出所有通道对应的相对延迟激励时序[10]
二、硬件设计与实现
2.1 FPGA 概述及优势
现场可编程门阵列(FPGA)是一类可通过硬件描述语言进行功能定制的半导体器件,其内部由可编程逻辑块、可配置互连资源和丰富的输入输出单元构成,能够高效 现各类定制化数字系统。相较于专用集成电路(ASIC),FPGA 具有开发迭代快、初期投入低、可重复编程等技术特点,能够依据相控阵系统的具体需求动态调整硬件逻辑,甚至在运行中完成部分重构,因而在通信、雷达信号处理等需要高适应性的领域得到广泛应用[11-1

图 6.FPGA 主控板实物图
2.2 系统总体功能设计
在使用 VerilogHDL 进行复杂硬件电路设计时,普遍采用层次化与模块化设计方法。其核心思想是将目标系统按功能分解为多个相对独立的子模块,每个子模块仅完成特定功能并通过标准接口进行通信,从而降低模块间的耦合度。这种自顶向下的设计策略不仅有助于实现系统的结构化分层、简化整体设计复杂度,还能有效隔离模块间的相互影响,为设计调试和错误定位提供便利,进而提升开发效率。图7 所示为系统的整体功能架构框图。

图7.FPGA 逻辑电路总体功能框图
(1)PFGA 读取 SD 卡数据
为实现音频样本的高吞吐量、低延迟读取,本系统构建了完整的存储访问通路。SD 卡控制器采用四线 SPI 模式,通过双边缘采样和时钟相位优化,将接口时钟频率提升至 50MHz,理论读取带宽达到 12.5MB/s。控制器内部实现 FAT32 文件系统解析层,支持长文件名及多级目录索引,能够自动识别存储介质中的 WAV 格式音频文件。读取过程中,控制器对SD 卡返回的CRC 校验码进行实时验证,确保数据完整性。
(2) 高精度延时控制
延迟控制系统基于时间数字转换原理构建,采用三级精度递进架构。第一级为粗调延迟单元,由可预置的 32位递减计数器实现,计数步长为10ns(对应100MHz 时钟),提供0-42.9 秒的延迟范围。第二级为细调延迟单元,采用进位链延迟线技术,通过配置查找表驱动强度,实现 64 级可调延迟,每级分辨率 156ps。第三级为模拟延迟补偿单元,通过测量各通道PCB 走线长度差异,在配置阶段写入固定的补偿值,消除物理布线引入的时间偏差。
(3)DAC 接口与功放
本系统采用 TDM 模式将 16 通道 模块将 16 路 24 位音频样本按照TDM 帧结构编排,每帧包含 256 个 填充测试序列用于链路监控。CRC 校验模块为每帧添加 8 位校验码 阈值时触发中断请求。外接功放选用 HierSound 的功放板每片芯 成 16 通道阵列。各 DAC 芯片的参考电压由独立低噪声 LDO 提供, 率设定为 40kHz,群延迟波动小于10ns。

图8. 功放实物图三、验证结果
3.1 波束定向性与声压级增益测试
在背景噪声较小的实验室内,使用校准后 的声压级 离阵列中心 5 米处的弧线上进行测量。结果如图 3所示。当波束电子偏转至 30°时,主轴方向声压级达到 108.5dB,而在侧向 30°位置声压级衰减至 92dB,前后比达到 16.5dB,证明了波束良好的方向性。与全向广播模式(同等总功率下,5 米处声压级约为 93dB)相比,主轴方向声压级增益超过15dB,有效验证了声能聚焦的效果。
3.2 系统响应时间测试
使用信号发生器模拟触发指令,让波束在 0∘ 和 45°之间跳变。同时,用数字示波器捕获 FPGA 的波束更新标志信号和置于主轴方向的麦克风输出信号。测量数据显示,从指令生效到声波波束能量在目标方向达到稳定的时间间隔为8.7ms。这主要得益于FPGA 的硬件并行与流水线处理架构,其响应速度远超基于伺服电机的机械式系统。

图 9. 相控阵 1x4 实物图
四、结束语
本文详细阐述了一种基于 FPGA 的相控阵智能驱鸟系统的完整设计与实现方案。该系统通过创新的硬件架构与 FPGA 逻辑设计,解决了多通道音频信号的高同步、高精度延迟控制难题,成功生成了可快速扫描的定向高声强声波波束。测试数据证实,该系统能够以较低的总体功耗,实现远距离、高精度的定向声波投射,并对动态目标进行毫秒级快速响应,同时极大降低了非目标区域的噪声污染。该工作不仅为现代驱鸟挑战提供了一种高效、环保的解决方案,也为相控阵技术在其它民用领域的应用提供了有价值的工程参考。
参考文献
[1] 虞伶俐, 赵志强, 黎剑. 相控阵快速波束控制算法设计与FPGA 实现[J]. 电子信息对抗技术,2024,39(2):79-84
[2]崔娟,王红亮,何常德,薛晨阳.基于FPGA的超声相控阵发射系统设计[J].仪表技术与传感器,2015(7):54-56
[3]Dos Santos M J S F,dos Santos J B.FPGA-based control system of an ultrasonic phased array[J].Strojniški vest--Journal of Mechanical Engineering,2011,57(2):135-141.
[4]Shang W,Dou Z,Xue W,et al.Digital beamforming based on FPGA for phased array radar[C]//2017 Progress In Electromagnetics Research Symposium-Spring(PIERS).IEEE,2017:437-440.
[5]Fulton C,Yeary M,Thompson D,et al.Digital phased arrays:Challenges and opportunities[J].Proceedings of th IEEE,2016,104(3):487-503.
[6] 陈志逸 , 陈海田 , 黄辉 . 基于 FPGA 的相控阵天线波束控制单元设计与实现 [J]. 电脑知识与技术 ,2025,21(16):95-100
[7] 骆英 , 王伟 , 王自平 , 徐佳 . 基于 FPGA 的超声相控阵相控发射系统的研究 [J]. 仪表技术与传感器 ,2010(10):51-5371
[8]王瑞,李伯全,骆英,王伟.基于FPGA的超声相控阵系统接收装置设计[J].仪表技术与传感器,2010(7):69-71
[9] 邓鹰飞 , 刘桂雄 , 唐文明 .FPGA 超声相控阵高压发射精确延时设计 [J]. 中国测试 ,2015,41(5):83-86
[10] 高嵩 , 胥剑涛 . 基于 FPGA 的相控阵天线波束控制算法优化研究 [J]. 电子技术应用 ,2021,47(9):82-8595
[11] 杨天雪 , 徐春广 , 李爽 . 基于 FPGA 的超声相控阵波束合成技术 [J]. 无损检测 ,2008,30(11):813-815819
[12] 杨先明 , 王海涛 , 赵大丹 , 郭瑞鹏 , 沈立军 . 超声相控阵高精度延时设计的 FPGA 实现 [J]. 无损检测 ,2014,36(5):16-1822

 京公网安备 11011302003690号
京公网安备 11011302003690号


