



- 收藏
- 加入书签

基于智能钩锁装置的轨道交通人工组织行车效率提升研究
摘要:城市轨道交通线路运营过程中发生信号故障时,需运营人员人工组织行车,此过程中行车效率大幅降低,且传统现场确认道岔位置、人工钩锁的作业方式存在办理效率低下、行车延误时间太长、人员安全风险高等突出问题。本文通过定量分析人工组织行车过程中钩锁作业的耗时特征与实施难点,提出应用远程智能型钩锁装置提升作业效率与安全性的解决方案,系统论述智能钩锁装置的设计思路、实现形式;同时对智能钩锁器与传统方式的应急处置进行对比分析,深入探讨人工组织行车的作业流程优化与安全卡控要点。关键词:人工组织行车,智能钩锁装置,信号故障,应急处置
中图分类号 11-5144/U
目前,城市轨道交通已成为各大城市的骨干交通运输方式,一线城市轨道交通交通分担率更是达到 50% 以上。市民对城市轨道交通的依赖程度持续提升,对运输服务的时效性、安全性要求也逐步提高。运营期间信号设备故障极易对轨道交通运营造成显著影响。当正线信号设备及列车自动监控系统(ATS)发生故障后,需运营人员现场确认道岔位置并实施人工加锁作业,该作业方式不仅导致行车组织效率大幅降低,行车延误时间较长,还存在人员进入轨行区的人身安全隐患。在高客流密度线路,信号故障引发的延误事件不仅会严重影响市民出行,还易引发广泛的社会舆情。因此,研究并提升信号故障情况下的人工行车组织效率,对轨道交通运营保障具有重要的现实意义。
1 信号故障下人工行车组织现状
1.1 道岔故障
当城市轨道交通线路发生道岔故障后,应按照“降低故障影响、尽快恢复运营、利用行车间隔修复”的原则进行处置,当前国内各大城市轨道交通的处置流程基本为:
线路出现道岔故障且通过终端操作、现场检查等确认手段仍无法消除的,行车调度人员应优先变更列车进路组织行车。如不能变更列车进路,行车调度人员或车站人员应单操单锁相关道岔。如道岔无法单操单锁,行车调度人员应组织车站人员将道岔钩锁到正确位置。上述操作完成,行车调度人员确认具备行车条件后方可组织行车。
1.2 联锁故障
当一个及以上联锁区联锁故障、信号接口失效等故障时,行车调度人员组织故障区域启用电话闭塞法组织行车,由车站人员人工排列进路并办理闭塞,组织列车运行。
1.3列车自动监控(ATS)故障
当中央及车站 ATS 故障,无法显示列车位置、设备状态、列车车次等行车信息时,由行车调度组织故障区域内车站启动电话闭塞法组织行车,车站人员人工排列进路并办理闭塞,组织列车运行。
2 现阶段存在的关键问题
信号故障下传统人工组织行车模式,在作业时效性、人员处置安全性、应急处置及时性三个维度存在突出问题,且各问题相互影响,进一步放大了故障对轨道交通运营的负面影响,具体问题分析如下:
2.1 行车组织的时效性问题
当道岔故障后列车进路无法变更时,按照“先通后复”处置原则,需首先判断道岔位置并将其锁闭在正确位置,才能组织列车通过。锁闭道岔位置首先尝试使用车站级工作站进行远程操作,若无法操作则由车站人员到达现场进行人工排列进路。为精准分析时效性问题,对不同作业场景下的进路准备时间开展定量测试与对比分析。
2.1.1 道岔可单操处置时间
受操作人员熟练程度、设备反应速度等方面影响,道岔的单操时间会产生细微差异,因此选择 3 组不同设备厂家的道岔分别进行 3 次单解、转动、单锁操作测时,单操一副道岔所需用时平均为 25.67 秒,以国内较为常见的折返配线为例(图 1),通过单操道岔排列折返进路用时共180 秒,其中折进存车线77 秒,折出存车线103 秒。
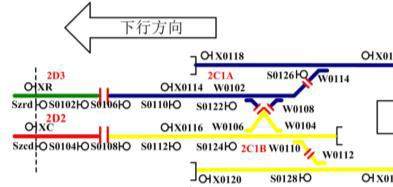
图1 折返线路图
2.1.2 道岔不可单操处置时间
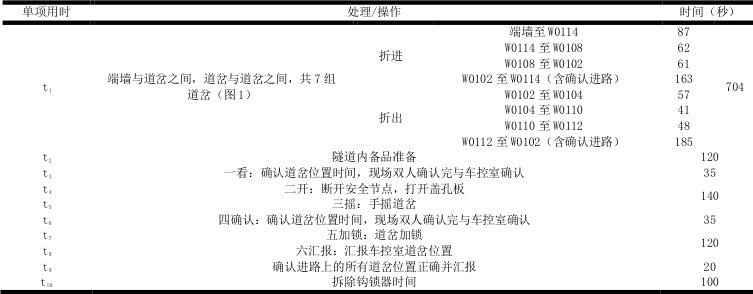
当无法使用现地工作站单操道岔时,需要车站人员进入区间手摇道岔并加锁,经现场测试,各步骤耗时如表 1 所示。①设手摇单个道岔合计用时为T1:T1=t2+t3+t4+t5+t6+t7+t8=450 秒②设单个道岔无需转动道岔仅加锁用时为T2:T2=t2+t3+t7+t8=275 秒③设人工准备折返进路合计用时T3:当仅需摇动 1 组道岔用时:T4=t1+t2+7(t3+t7+t8)+t4+t5+t6+t9=2104 秒当 7 组道岔均需摇动用时:T5=t1+7(t2+t3+t4+t5+t6)+6(t7+t8)+t9=3754 秒正常情况下,当采用固定的折返线折返时,折返进路上仅需摇动1 组道岔,如图1 所示,为折返道岔W0102(或W0106),但当设备故障时,可能造成折返进路上部分道岔位置不正确,此时需手摇道岔的数量在1 组与7 组之间,因此用时为2104 秒≤T3≤3754 秒。
表1 人工准备进路项目测时表(双转辙机、9 号道岔)
2.1.3 时效性问题小结
当发生联锁失效及道岔故障时,如图1 所示,车站组织1 列车进行站后折返时,车站员工处置时间约在 35 分钟至 63 分钟之间,叠加组织列车运行时间,首趟车完成折返需要45 分钟至73 分钟,行车效率大打折扣。
当发生信号故障时,极易出现“运营列车压在道岔上”等场景,此时需安排车站人员进入车底判断道岔状态等风险较大作业,存在较大人身安全风险。
2.3 应急处置的及时性问题
当发生故障需要人工排列进路时,行车延误较大,且大客流聚集、乘客情绪激动等多种影响问题,需要运营员工及时协同处置。应急节多,影响大,极易造成故障影响进一步扩大,引发社会舆情。
针对传统人工组织行车的突出问题,核心应对策略为引入智能型钩锁器,通过技术手段实现道岔的远程钩锁、解锁及道岔位置精准判断,从根本上提升行车组织效率,同时解决 “现场判断道岔位置、仅需钩锁道岔” 两类核心场景下的员工处置安全性问题。
3.1 智能钩锁设备整体构思
智能型钩锁器的核心设计理念为远程作业、智能监控、无需人工现场操作,设备整体配备高清摄像头监控模块,采用电机作为动力源,实现道岔物理加锁、解锁的远程操控;设备设计需满足高精度、无需拆装、通用性强、可远程电子操作、全方位状态盯控的特性。
智能型钩锁装置需配套搭建一套完整的监控操作集成系统,该系统为设备远程作业的核心控制载体,需实现对智能钩锁器的远程操作、设备自检及实时监控三大核心功能。系统界面需按照轨道交通辖区内道岔分布进行布局,点击目标道岔对应的钩锁器对象,可直接调出该设备的操作界面及实时监控界面,实现 “一键定位、全程管控”。
3.2.1 监控功能
监控功能是智能钩锁器实现远程状态判断的基础,需满足道岔现场状态、设备自身状态的双重实时监控。3.2.2 操作功能
可对钩锁装置进行“定位”启动操作(道岔开通定位后进行加锁作业)、“反位”启动操作(道岔开通反位后进行加锁作业)、“装置锁定”操作(完成钩锁)、“ 一键恢复”操作(钩锁装置拆卸恢复至待令状态)、“装置解锁”操作。
3.3 智能钩锁功能实现形式
基于上述功能需求,结合轨道交通道岔的结构特点及作业要求,设计四种类型的智能钩锁器实现形式,均可适用于多类型钢轨道岔,有效解决传统钩锁器的通用性差问题,具体实现形式如下:
3.3.1 电机直驱式钩锁器 钩锁器主要由主体、伸拉杆、固定杆、电机等部分组成。由电机带动伸拉杆抬起相应侧位的固定杆将尖轨与基本轨进行锁闭。
3.3.2 电机卡扣式钩锁器:钩锁器主要由主体、连接杆、钩锁卡扣、电机等部分组成。需要动作时主体带动相应侧位的连接杆及钩锁卡升起至钢轨底端水平面,再利用电机带动钩锁卡扣进行钩锁并锁闭。
3.3.3 液压传动式钩锁器:钩锁器主要由主体底座、液压传动装置、电力信号装置等部分组成。需要动作时由液压装置带动固定杆将应侧位尖轨与基本轨进行锁闭。
3.3.4 螺旋传动式钩锁器:钩锁器主要由主体底座、螺旋传动压力装置、电力信号装置等部分组成。需要动作时由螺旋传动压力装置动固定杆将相应侧位尖轨与基本轨进行锁闭。
4 智能钩锁器与传统方式的应急处置对比分
从作业耗时、安全性、应急处置能力三个核心维度,开展智能钩锁器与传统人工钩锁方式的应急处置对比分析,同时结合定量测试数据,对比两种方式在折返进路准备、道岔锁闭等核心作业的具体表现,全面论证智能钩锁器的优越性。
4.1 作业耗时对比
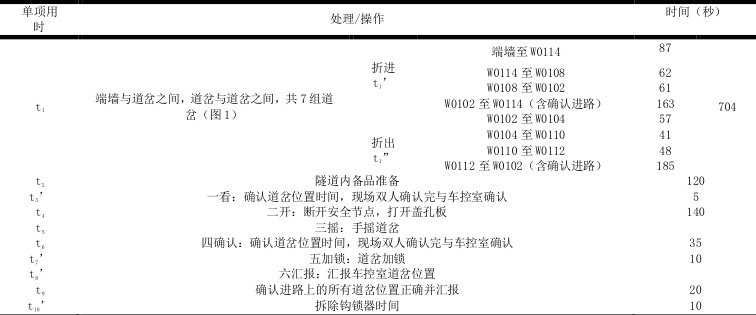
智能钩锁器可实现远程的钩锁、加锁功能,如表2 所示,可节省t7、t8、t10 用时至10 秒内;可实现远程查看道岔位置及密贴情况的能,当道岔位置正确时,无需逐个道岔查看,可直接前往需摇动的道岔,最多可节省t1 至322 秒内、t3 至5 秒内,此时:
①设手摇单个道岔合计用时为 T1‟,需人工手摇道岔时,仍需现场判断道岔位置及密贴情况,因此判断时间使用 t3,加锁可远程进行,因此使用 t7‟、t8‟:
②设单个道岔无需转动道岔仅加锁用时为T2,远程判断道岔位置正确且密贴后,远程加锁,无需车站人员至轨行区,因此使用t3‟、t7‟、t8‟:
T2‟=t3‟+t7‟+t8‟=15 秒
③设人工准备折返进路合计用时T3‟:
当仅需摇动 1 组道岔用时:T4‟=t1‟+t2+7(t3‟+t7‟+t8‟)+t4+t5+t6+t9=793 秒当 7 组道岔均需摇动用时:T5‟=t1+7(t2+t3+t4+t5‟+t6‟)+6(t7‟+t8‟)+t9=3094 秒
正常情况下,当采用固定折返线折返时,折返进路上仅需摇动1 组道岔,如图1 所示,为折返道岔W0102(W0106),此时结合智能钩锁器后用时为 793 秒;当设备故障时,可能造成折返进路上部分道岔位置不正确,此时需手摇道岔的数量在 1 组与 7 组之间,因此最高耗时为 3094 秒。
因此智能钩锁器投用后,首列车最快折返进路办理时间为13 分钟,较未使用前压缩22 分钟,有效提升行车组织及应急处置效率。
表2 智能钩锁器投用后人工办理进路用时统计表
4.2 作业安全性对比
智能钩锁器从根本上改变了 “人工现场作业” 的传统模式,实现了 “人不离岗、远程作业”,作业安全性得到质的提升:
若位置正确则直接远程完成加锁作业,有效避免员工进入车底、轨行区的高风险操作;
4.2.2 道岔加锁、解锁、状态确认等核心作业均通过远程系统完成,作业人员无需进入轨行区开展长距离行走、手摇道岔、人工钩锁作业,消除了轨行区作业的各类安全风险;
4.2.3 智能钩锁器的操作过程具备多重安全校验机制,设备自身配备定位传感器、压力传感器,可实时检测锁闭状态,避免人工误操风险,同时系统具备操作权限管理功能。
4.3 应急处置能力对比
智能钩锁器投用后,轨道交通信号故障的应急处置响应速度与处置能力得到大幅提升,主要体现在:
4.3.1 处置响应更快速:发生信号故障后,无需人员到达现场,作业人员可在车控室第一时间通过远程系统查看道岔位置及尖轨密贴况,第一时间完成远程加锁作业;
4.3.2 故障影响更可控:由于处置耗时大幅压缩,列车晚点时间可有效控制,避免了列车长时间晚点引发的大客流聚集问题,从源头减少了次生问题的发生;
4.3.3 处置流程更简洁:智能钩锁器简化了传统处置流程中的备品准备、现场核对、人工加锁等步骤,作业流程更简洁,提升了应急处置的精准度与效率。
智能钩锁器的投用不仅带来了技术层面的升级,也推动了轨道交通信号故障下人工组织行车作业流程的整体优化,解决目前信号故障下人工组织行车难以施行的现状,另外需结合智能设备的特点,制定针对性的安全卡控要点,确保 “技术升级 + 流程优化 + 安全管控” 的一体化落地,实现应急处置的高效与安全。
5.1.1 删减冗余步骤:删除传统流程中的备品准备、轨行区行走、现场人工钩锁、现场确认汇报等冗余步骤,将核心作业流程简化为 “故障判断-远程查看-远程操作-行车组织”,大幅提升流程效率;
5.1.2 实现岗责整合:将传统流程中 “值班站长+站务员现场岗位” 与 “行车值班员岗”的职责进行整合,车控室即可完成全流程作业,优化了岗位职责,提升整体协同性;
5.1.3 推动流程数字化:智能钩锁器的监控操作系统与车站综合监控系统联动,实现故障处置过程的数字化记录、可视化监控;5.1.4 优化衔接流程:优化故障处置与客流组织的衔接流程,处置作业与客流组织同步开展,避免各环节之间的等待与延误,提升综合处置效率。
5.2 安全卡控要点
5.2.1 设备状态卡控:每日运营前,车站值班人员需对智能钩锁器进行功能检查,包括通信状态、监控模块、操作功能等,确认设备无故障后投入使用,建立设备检查台账;
5.2.2 操作权限卡控:智能钩锁器的监控操作集成系统设置严格的操作权限管理,不同岗位赋予不同操作权限,非授权人员无法进行设备操作,防止误操作;
5.2.3 操作过程卡控:所有远程操作必须执行 “一人操作、一人互控” 制度,操作前双方确认操作指令、道岔编号、锁闭方向,操作后共同复核锁闭状态,确保操作无误;
5.2.4 状态监控卡控:故障处置过程中,需通过智能钩锁器的监控模块实时盯控道岔状态,列车通过故障区段时,重点监控道岔锁闭状态是否稳定,发现异常立即采取停车措施;
5.2.5 应急切换卡控:制定智能钩锁器故障后的应急切换流程,当设备发生故障,值班人员需在 1 分钟内切换为传统人工钩锁方式,同时向行车调度人员汇报,保障处置连续性。
结语
本文研究了轨道交通信号故障下传统人工组织行车的痛点问题,提出了应用远程智能型钩锁器的效率提升和人工组织行车的优化方案。通过多维度对比分析验证了智能钩锁器在作业耗时、安全性、处置能力方面的显著优势,同时提出了智能钩锁器应用后的作业流程优化与安全卡控要点。研究结果表明,智能钩锁器能有效提升信号故障后的行车组织效率、应急处置效率及作业处置安全性:彻底解决了道岔故障需人工现场加锁的问题,有效将折返站人工办理进路的时间压缩 22 分钟以上,行车效率提升超 60%;实现了道岔故障处置的 “远程作业、人岗分离”,从源头上消除了现场作业的安全风险;推动了电话闭塞法行车组织方法从 “制度规定” 向 “实际应用” 的转变。
作者简介:贾拴航,1984.05,男,汉族,陕西省乾县,大学本科,企业技术管理人员,高级工程师,主要研究方向:城市轨道交通运营管理。

 京公网安备 11011302003690号
京公网安备 11011302003690号


