



- 收藏
- 加入书签

基于压制干扰和信号欺骗的狱内无人机反制方法
 打开文本图片集
打开文本图片集
摘要:伴随无人机行业的飞速发展,无人机在性能不断提升和民用市场飞速发展的加持下,其反制难度也在不断加大。近年以来,无人机黑飞现象频发,对监狱设施安全、监狱信息安全、监狱人员安全造成了一定威胁。针对此类现象,通过对当前无人机控制原理及狱内的无人机反制方式进行分析,提出了一种集识别、压制干扰、信号欺骗为一体的无人机反制方式以实现对无人机的有效反制,并对后续无人机反制系统的发展和完善提出设想。
关键词:无人机反制;图像识别;压制干扰;信号欺骗
引言:随着无人机购买渠道的日趋方便,随之而来也带来很多新问题,越来越多的无人机“黑飞”事件的发生,对监狱安全造成了严重威胁,此类无人机也被不法分子用于获取保密信息、投递危险物品,造成了重大的社会危害。监狱作为的高保密性区域,安全问题是监狱工作中不容忽视的要点,在智慧监狱建设的大背景下,无人机反制系统的搭建已成为监狱安防的关键组成[1]。本文的研究重点为:通过引入卷积神经网络YOLO对无人机进行识别,在及时发现靠近监狱的“黑飞无人机”后采取压制性干扰并通过发射GPS欺骗信号对无人机进行位置欺骗,从而实现对无人机的有效反制。
一、无人机识别模块
无人机识别模块是反制系统有效运行的基础,该模块的主要任务是对图像进行有效的识别,通过卷积神经网络实现对无人机的有效识别,实现对特定区域内的无人机进行有效监控,这在深度学习方法中主要属于目标检测领域,通过找到图像中的高注意力区域,确定这些区域的位置和类别。
目标检测主要分为两大类:单阶段式目标检测算法和两阶段式目标检测算法。两阶段式目标检测算法在图像输入后,筛选出图像中可能会存在目标的区域划出边界,通过判断每个边界内是否存在目标物体[2]。单阶段式目标检测算法在图像输入后,通过对图像得出物体的类别和位置信息。将定位目标边界的问题转换为回归问题,图像在输入后首先会缩放到相同尺寸,并以网格形式均等划分,仅需对图像进行单次处理就可以得到对应的边界位置和分类结果。一般来说,单阶段式模型有较高的计算速度,两步模型有较大的精度优势。目前该领域中涌现了一大批优秀算法,例如CNN(Convolutional Neural Network)、R-CNN(Region-CNN)、Fast R-CNN(Fast Region-based Convolutional Network)、YOLO(You Only Look Once)、CornerNet(Detecting Objects as Paired Keypoints)等多种算法,这些算法在考虑到计算效率的同时,充分考虑到了对多目标准确识别的任务需要,由于无人机的种类丰富、飞行状态多样、大小不一,因此识别难度较大。为此,本文将引入深度学习,并以YOLO作为图像识别的核心算法。
1.卷积神经网络
卷积神经网络作为深度学习领域的多层结构化算法,主要由这几类层构成:输入层、卷积层,ReLU层、池化层和全连接层。通过这几类层之间的结合,就能够构建出一个具有学习能力的卷积神经网络。图像在输入卷积层与全连接层时,除了会用到激活函数,还包括大量参数,即网络中每一个神经元的权值 和偏差 ;而池化层则是一个固定不变的函数操作。
卷积层和全连接层中的参数会随着梯度下降被训练,由于全连接的特点是把本层的神经元与上一层神经元的全部连接,这就导致了网络整体拥有庞大的参数。而局部连接的方式就极大地减少了参数的个数。且局部连接的主要目的是将每个神经元同输入的神经元之间的某一个区域进行连接,这这种方式来进行对局部特征的学习。它的主要优点就是在于网络本身可以明显的减少参数量,进而减少繁杂的计算量。
通过权值共享的方式,以减少网络中的参数量。对于权值共享可以进行如下理解:在同一幅图像之中,图像中的一个值对于其附近的值会具有一定的相关性,这就导致会该值及其附近值所组成的区域会被认为形成了与其他区域相比具有一定区分性的局部特征。但是一幅目标图像的局部特征的方位是一般是固定的。因此参数量减少在某种意义上也可以说是防止了过拟合的出现。
卷积层和全连接层中的参数会在反向传播过程中依据梯度下降被训练,过程完成后,卷积神经网络计算出的分类结果和训练集中的图像标签相吻合。
构建卷积神经网络,确定网络层次结构和权重参数后,图像依次进入卷积层、池化层、全连接层,通过向前传播进行计算,并通过BP(BackpropagationPass)算法进行反向传播,对参数进行调整,当误差满足预设值或迭代次数满足预设值时,网络停止训练,计算准确率并输出形成最终的卷积神经网络。
2.YOLO介绍
卷积神经网络利用了一系列的卷积层和采样层来模拟人脑对视觉信号的逐层处理机制,从而有效提取出图像的特征。在卷积的过程中,窗口在滑动的过程中需要按照一定的步长进行,在窗口滑动的过程中不能有死角,这对步长的合理选择提出的挑战,且在对多目标检测时,需要对不同目标进行检测,这造成了参数过多且效率较低,但在YOLO算法中,不需要对窗口进行滑动式的遍历,YOLO将图像划分为若干不重复的方格形状的区域,从而减少区域的重合式划分,通过加入卷积层,可以实现局部连接网络,有效减少了需要训练的网络参数和窗口扫描次数,提升了网络的效率,这对于在利用实时视频画面进行对无人机的精准识别来说至关重要。
YOLO算法的主要步骤为:
(1)将图像分为若干方格,方格的尺寸为 ,每个方格中的图像负责对应的目标图像中的网格,若网格中无目标图像,则进行跳过,若存在,则需要对其进行计算。
(2)对网格中的图像输入网络进行预测,确定目标边界,数量为 ,并预测置信度的值,此值代表了预测的网格中包含目标的可能性大小以及位置的准确性(即是否恰好包裹这个物体)。
(3)对每一个目标边界,YOLO都会给出对应的5个值 ,在这5个值中,前四个为边界值的位置,其中 为边界区域中心点的位置, 为边界区域的宽和高,最后一个值为该区域的置信度。并且每一个网格会给出一个类别判断,这个类别记为 类,对于整个网络来说,即需要输出一个 维的张量。
YOLO算法相较于传统的卷积神经网络中所采取的滑动窗口检测算法来说,其优点在于速度块,克服了原有算法中对图像必须采取全部遍历和参数过于庞大所造成的耗时较长问题。YOLO检测算法的引入,极大的提高了我们对无人机图像的识别效率。
二、无人机干扰模块
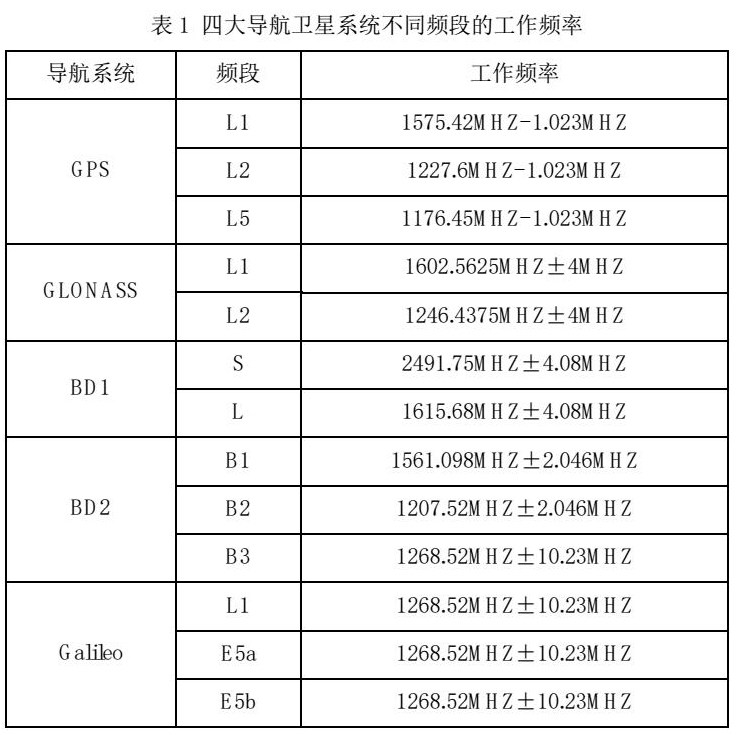
针对无人机的导航信号进行干扰的主要方式目前分为制式干扰和欺骗式干扰两种:压制式干扰通过直接使用噪声信号遮盖目标信号所在的频段,从而使无人机的接收机无法正常工作。进而进入搜星模式,其工作方式以高功率发射信号以占用对应的卫星信号频段为主,使无人机定位模块接收到的的干扰信号强度大于卫星信号强度,使无人机无法获得卫星信号,进而失去定位能力。目前无人机的定位模块主要依赖于四大导航卫星定位系统,即中国北斗系统BDS、美国全球定位系统GPS、俄罗斯格洛纳斯系统GLONASS、欧洲伽利略全球卫星导航系统GALILEO,民用频点合计17个[3]
按照民用频点的相近载波频率进行合并,可以将卫星导航信号频率划分为3个频段,分别为1150MHz-1300MHz、1550MHz-1650MHz、2470MHz-2520MHz,在压制信号产生过程中,为了实现对全部卫星导航信号频率的压制,需同时输出以上3个频段的压制干扰信号。在对卫星定位系统发出的导航信号进行压制性干扰过程中,最为有效的干扰类型包括扫频、单载波、宽带高斯白噪声等样式,本文选取单载波干扰和宽带高斯白噪声干扰作为压制性干扰的实现方式。
1.高斯白噪声干扰
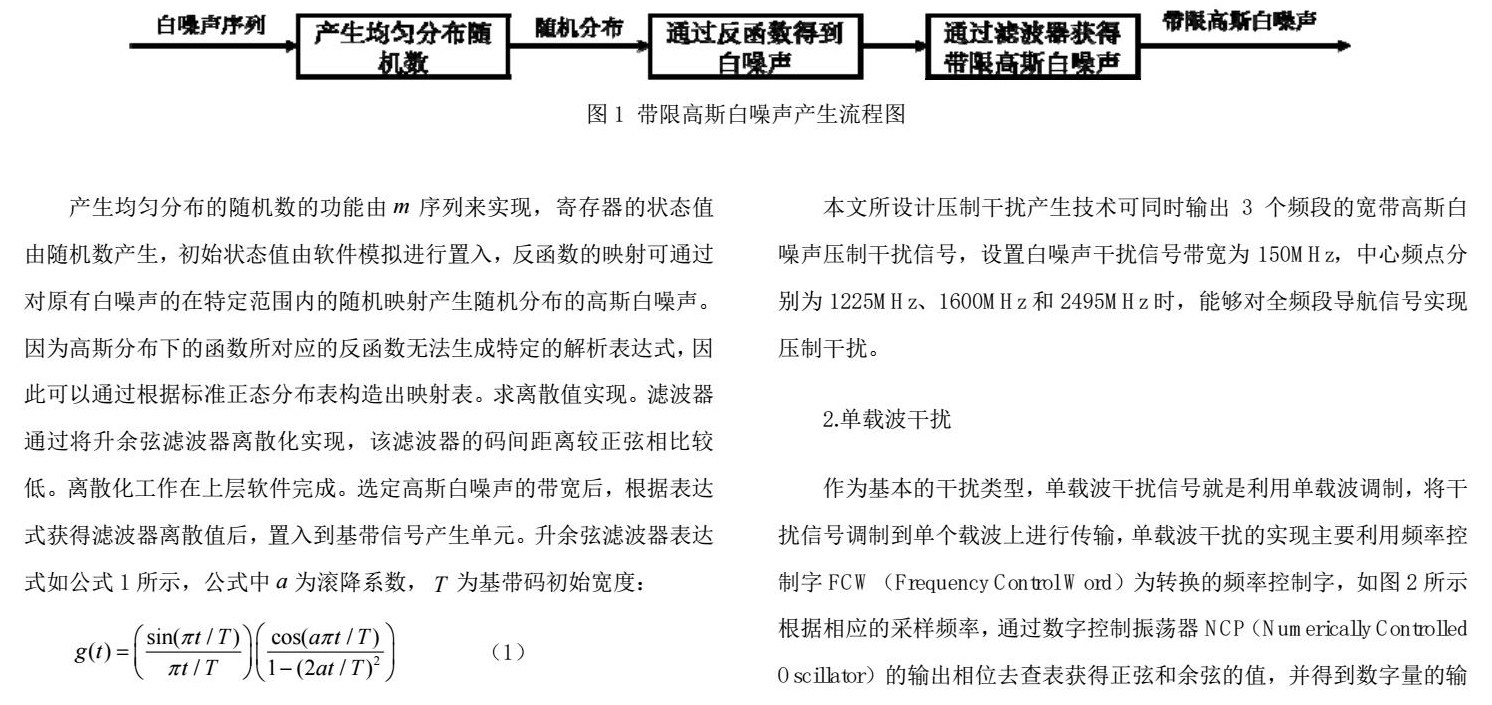
高斯白噪声可通过数字化方式来实现,其生成方式分为两个步骤:先产生白噪声序列的均匀分布,而后通过白噪声分布获得高斯白噪声。带限高斯白噪声实现框图如图1所示通过使用 序列(最长线性反馈移位寄存器)实现均匀分布的白噪声,通过反函数映射方法实现均匀分布向高斯分布的转换。为获得带限高斯白噪声,还需要将高斯白噪声通过一定带宽的滤波器进行滤波。
产生均匀分布的随机数的功能由 序列来实现,寄存器的状态值由随机数产生,初始状态值由软件模拟进行置入,反函数的映射可通过对原有白噪声的在特定范围内的随机映射产生随机分布的高斯白噪声。因为高斯分布下的函数所对应的反函数无法生成特定的解析表达式,因此可以通过根据标准正态分布表构造出映射表。求离散值实现。滤波器通过将升余弦滤波器离散化实现,该滤波器的码间距离较正弦相比较低。离散化工作在上层软件完成。选定高斯白噪声的带宽后,根据表达式获得滤波器离散值后,置入到基带信号产生单元。升余弦滤波器表达式如公式1所示,公式中 为滚降系数, 为基带码初始宽度:
本文所设计压制干扰产生技术可同时输出3个频段的宽带高斯白噪声压制干扰信号,设置白噪声干扰信号带宽为150MHz,中心频点分别为1225MHz、1600MHz和2495MHz时,能够对全频段导航信号实现压制干扰。
2.单载波干扰
作为基本的干扰类型,单载波干扰信号就是利用单载波调制,将干扰信号调制到单个载波上进行传输,单载波干扰的实现主要利用频率控制字FCW(Frequency Control Word)为转换的频率控制字,如图2所示根据相应的采样频率,通过数字控制振荡器NCP(Numerically Controlled Oscillator)的输出相位去查表获得正弦和余弦的值,并得到数字量的输入和输出
高斯白噪声与单载波压制均可同时输出3个频段的宽带压制干扰信号,能够对全频段卫星导航信号实现压制干扰。
三、无人机欺骗模块
在压制干扰完成后,通过制造与卫星的真实信号相似的虚假信号,从而诱使对方获得错误的卫星信号并据此进行定位,达到欺骗的目的,进而实现对无人机的有效反制,该模块是在保证监狱空防安全的前提下,实现有效反制的核心环节。欺骗干扰模块在运行的过程中通常具有如下特点[4]:
A.为了使无人机的信号接收机能跟踪到欺骗信号,在发射信号的功率选择上使用通常采取与一般信号发射装置相比较大的功率,在干扰模块工作的过程中,信号发射装置会不断增大发射功率,使无人机的接收机能够成功接收到发射器所发出的欺骗信号。
B.欺骗信号会针对其模拟的真实信号进行编码,拥有相似的信号频率、编码、相位等体制。
1.生成式欺骗干扰
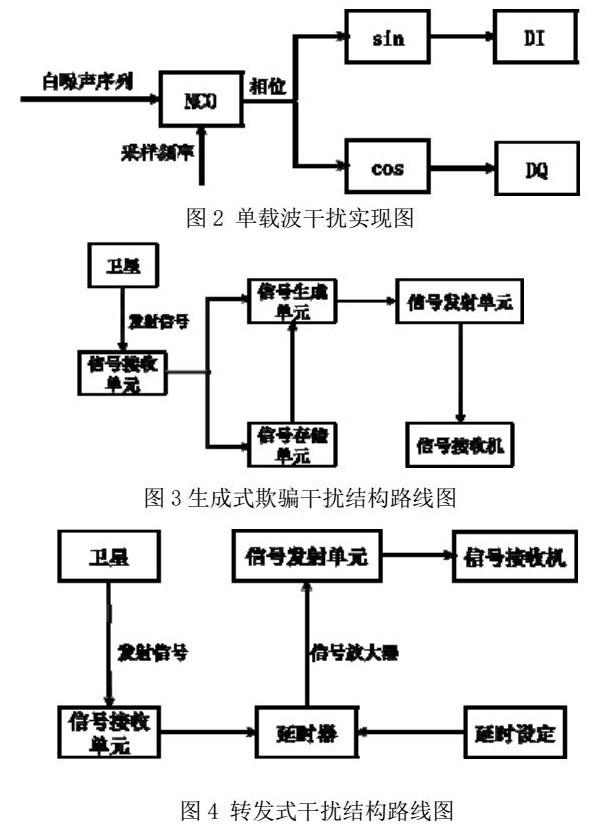
生成式欺骗干扰的目的是尽可能的模拟出接近导航卫星所发出的真实信号,以达到反制的目的,如图3所示,生成式欺骗干扰由天线与信号接收单元、信号生成单元、信号存储单元以及信号发射单元组成。在知道卫星信号的结构的前提下,接收到卫星发射的信号后,通过存储单元中对应的信号结构信息生成对应的欺骗信号,并通过信号发射单元发送至无人机的接收机。在信号发射中,导航卫星给无人机的接收机发出的虚假卫星信号与真实卫星信号具有相似的体制。从使无人机而产生虚假定位的结果。
对于不同的卫星所发射出的信号,生成式欺骗干扰需要模拟每一颗卫星信号并生成相应的欺骗信号发射出去,因此生成装置与其需要模拟的卫星信号是一一对应的,又因为是单一生成,因此系统至少需要四个生成模块,虽然目前四大导航系统的民码大部分已经公开,但仍需要充分了解各卫星信号具体的生成方式并及时对各类参数进行更新,这使生成式欺骗干扰有较大的滞后性、局限性和复杂性。
2.转发式欺骗干扰
转发式欺骗干扰的主要工作方式是对信号进行延时转发的同时对具体的输出功率进行控制,具体来说,通过对卫星所发射出的信号经过预先设定的延时转发后生成信号,通过转发式欺骗干扰使无人机接收机接收到信号发射单元所发射出的欺骗信号,使无人机得到一个具有相当误差的错误的定位。达到对无人机进行欺骗干扰的目的[5]。转发式欺骗干扰对发射功率的要求较低,且该干扰方式在工作中不易产生电磁污染,对其他设备的影响较小。同时,与生成式欺骗干扰相比,转发式欺骗干扰不需要充分了解卫星导航信号的较为具体生成方式和体制,尤其是在面对高速运动的无人机时,转发式欺骗干扰的反应速率较高,在针对无人机的接收机进行欺骗干扰中,转发式欺骗干扰的适应性更高。
转发式欺骗干扰的主要工作方式是对信号进行延时转发的同时对具体的输出功率进行控制,具体来说,通过对卫星所发射出的信号经过预先设定的延时转发后生成信号,如图4所示,通过转发式欺骗干扰使无人机接收机接收到信号发射单元所发射出的欺骗信号,使无人机得到一个具有相当误差的错误的定位。达到对无人机进行欺骗干扰的目的[5]。转发式欺骗干扰对发射功率的要求较低,且该干扰方式在工作中不易产生电磁污染,对其他设备的影响较小。同时,与生成式欺骗干扰相比,转发式欺骗干扰不需要充分了解卫星导航信号的较为具体生成方式和体制,尤其是在面对高速运动的无人机时,转发式欺骗干扰的反应速率较高,在针对无人机的接收机进行欺骗干扰中,转发式欺骗干扰的适应性更高。
四、结语
本文提出了一种集识别、压制干扰、信号欺骗为一体的无人机反制方式以实现对无人机的有效反制,并对后续无人机反制系统的发展和完善提出设想。通过将无人机的侦察系统和反制系统相结合,可以有效提高无人机反制过程的速度,以达到对无人机进行及时、有效的反制。形成监狱对无人机的陆空结合、立体防御,形成一套适合中国监狱系统使用的无人机监测防御系统,保障狱内空防安全。
参考文献:
[1]蒋兆军,成孝刚,彭雅琴,王俊,李智.基于深度学习的无人机识别算法研究[J].电子技术应用,2017,43(07):84-87.DOI:10.16157/j.issn.0258-7998.2017.07.022.
[2]康兢. 基于卷积神经网络的无人机目标检测算法研究[D].河北科技大学,2021.DOI:10.27107/d.cnki.ghbku.2021.000341.
[3]刘轶龙,谭志强,许磊,罗立成,方真.sss全频段导航压制干扰信号产生技术研究[J].现代导航,2022,13(01):16-22.
[4]张尧. 北斗转发式欺骗干扰检测技术研究[D].哈尔滨工程大学,2019.
[5]董树理,刘敏,许光飞.sss卫星导航欺骗信号检测技术研究[J].无线电通信技术,2019,v.45;No.271(05):550-554.
基金项目:2021年中央司法警官学院国家级大学生创新创业训练计划项目资助 项目编号:202111903004

 京公网安备 11011302003690号
京公网安备 11011302003690号


