



- 收藏
- 加入书签

车路协同条件下内侧式公交专用道左转与掉头冲突应对策略研究
 打开文本图片集
打开文本图片集

摘要:本文利用VISSIM仿真工具,采用延误作为评价指标,针对内侧式公交车道的左转与掉头车辆冲突问题,借助车路协同技术,提出一套感应式公交专用相位算法。最终得出如下结论:从公交优先的角度,固定式公交相位一定是最佳的,从保证社会车辆通行效率的角度,采用无公交专用相位是最佳的。但当公交车辆与社会车辆冲突时,必须采用公交专用相位的方式,保证公交车辆的安全性,在兼顾公交优先效果与社会车辆通行效率的前提下,当交叉口饱和度较低或者中等情况下,对于社会车辆的影响较小,且能给公交车辆提供较大幅度的优先;公交车辆的延误随着发车间隔的减小,呈现先减小后增大的趋势,当公交车辆的发车间隔小于15mim/辆时,采用感应式公交相位实现了公交优先与社会车辆的通行效率的最优。
关键字:固定式公交专用相位;感应式公交专用相位;内侧式
ABSTRACT:This paper uses VISSIM simulation tool and delay as an evaluation index, and proposes a set of inductive bus phase algorithm with the help of vehicle-road coordination technology to solve the problem of left-turn and U-turn vehicle conflict in the inner bus lane. Finally, the following conclusion is reached: from the perspective of bus priority, the fixed bus phase must be the best, and from the perspective of ensuring the efficiency of social vehicle traffic, the use of the no-bus phase is the best. However, when the bus and the social vehicle conflict, the bus exclusive phase must be adopted to ensure the safety of the public transport vehicle, under the premise of taking into account the priority effect of public transport and the efficiency of social vehicle traffic, when the saturation of the intersection is low or medium, the impact on the social vehicle is small, and the public transport vehicle can be given a larger priority; When the departure interval of public transport vehicles is less than 15mim/vehicle, the inductive bus phase is used to realize the optimization of bus priority and social vehicle traffic efficiency.
Key:Fixed bus phase, inductive bus phase, inside
0 前言
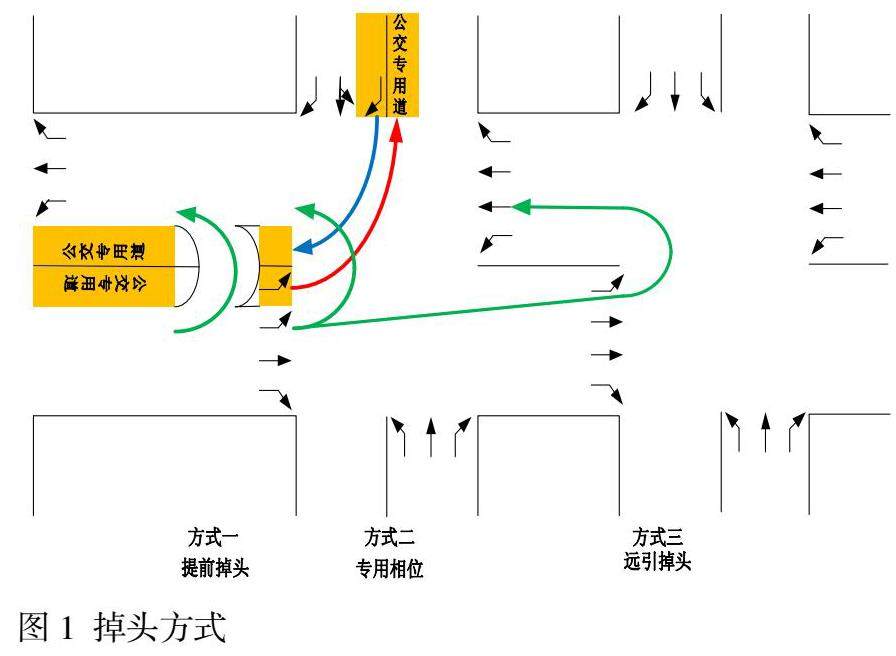
随着公交优先的理念不断深入人心,各个城市兴起了公交优先建设的新篇章。公交优先往往具有两种实施方式,一种是时间上优先,通过信号控制的方式实现;一种是空间上的优先,通过设置公交专用道的方式[1]实现。在公交专用道的设置中,以内侧式公交专用道最为常见。传统的内侧式公交车道,往往存在着如下图1所述的问题,当公交车辆左转时,同侧的掉头车辆往往会与公交车辆存在冲突。
目前解决掉头冲突的措施有三类,分别是绕行、提前掉头、专用相位。第一种绕行的措施,主要有苜蓿叶回绕式、同向下游回绕式、侧向下游回绕式和上游左转回绕式[2]。这种通过绕行的方式,解决掉头车辆冲突问题,有许多学者研究了这种方法的可行性。如沈超群等[3],采用TSIS微观仿真方法,以非信号控制交叉口为研究对象,利用主路速度方差、交织区平均速度以及平均延误作为评价指标,研究了远引掉头的选址。第二种通过提前掉头的方式解决禁掉问题,主要有张小龙等[4],以传统四相位信号控制交叉口为研究对象,提出路段提前掉头设置条件与方法。第三种,通过专用相位的方式,给与公交车辆或者掉头车辆独立的通行权[5-6],这种方式往往是一种定时控制缺乏灵活性。本文将采用智能网联技术,结合专用相位,提出一种基于智能网联技术的掉头冲突与内侧左转公交车辆的解决方法,并探讨它的适用条件。
1 问题描述
如图2所示,由于公交专用道内置导致掉头车辆与左转的公交车辆存在冲突,掉头车辆影响着公交车辆的运行。为了解决这样冲突问题,往往存在如下三种方案,第一种车辆提前掉头,传统的提前掉头在道路新建阶段是一种很好的实施方式,可以有效减少掉头车辆的通行距离。第二种车辆专用相位,它分为两个模式,一种是固定式公交专用相位,有效的保证公交车辆的安全性和通行效率,但无疑挤压了社会车辆的通行时间,将增加交叉口延误,另一种是社会车辆设置专用掉头相位,只有当掉头车辆达到一定的数量,才能有效的保证通行效率,尽量避免道路资源的浪费。第三种远引掉头即采取禁止掉头的方式,掉头车辆在相邻的下一个交叉口,进行掉头。这种方式往往会增加车辆的通行距离,当下游交叉口相距较远,将给掉头车辆带来极大的不便,除此之外,当掉头车辆较多时,将给下游交叉口带来极大的通行压力。分别对应下图方式一至三。
以上三种方式,都存在一定的有优缺点,方式(1)往往受制于道路条件无法实施;方式(3)往往会受制于下游交叉口的交通状况,存在一定的局限性,依次本文着重探讨方式(2),尽可能减少对于道路条件与路网条件的依赖。传统的专用相位采用固定式,会造成道路资源的浪费。因此本文将探讨一种利用智能网联技术,实现感应式的公交专用相位的解决方法。
2 感应式公交专用相位控制算法
2.1 车路协同下公交优先
车路协同技术下,公交优先业务流程主要包括路测感知模块、信息传输模块、控制方案研判模块、控制方案执行模块等,主要原理是通过 RSU(路侧检测终端)检测信号,OBU(车载检测终端)时发出信号,两者建立通信,当RSU接收到车辆到达信号后,将信号传入控制中枢。即当公交车辆到达OBU的检测范围内,则触发OBU;通过信息传输模块将信息传给信号优先控制主机;在信号优先控制主机中,进行优先控制策略的研判;最后将信号控制方案下达给道路信号控制机执行。
2.2 感应式公交专用相位控制算法
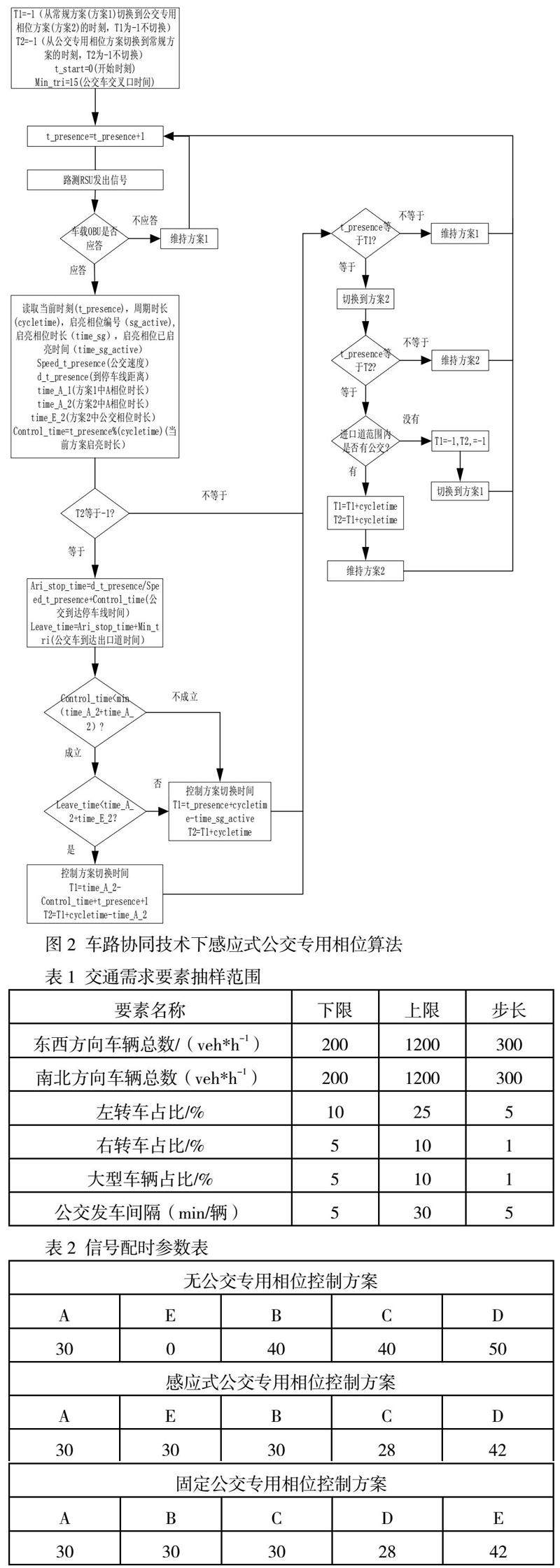
本文针对内侧式公交专用道左转与掉头冲突问题,提出一种感应式公交专用左转相位算法。相位控制流程如图2所示,具体流程如下:
步骤1:首先设置两套信号控制方案,一套无公交相位,一套存在公交相位;为了保证安全性,本文采用固定的相位相序方案,其中公交专用相位设置在A和B相位之间,同时为了尽量减少对于上下游交通流的影响,两套方案采用统一的信号周期。
步骤2:路侧RSU发出信号,车载OBU作出应答,当RSU接受到OBU的应答信号,进入步骤3,否则维持原信号控制方案1。
步骤3:确定信控方案切换时刻,如果当前为A相位启亮绿灯,则进入步骤4;否则在方案1运行到D相位结束时,切换到方案2,随后进入步骤5。
步骤4:判断是否能保证在A相位启亮,保持周期不变?如果能保持周期不变且公交相位启亮结束时,公交车能通过交叉口,则在A相位结束时切换到方案2,随后进入步骤5;如果不能,则在D相位结束切换到方案2,随后进入步骤5。
步骤5:判断何时调整到方案1,如果当前时刻有交叉车辆,则延长一个周期,随后进入步骤2;如果没与公交,则方案2的D相位调整为方案1,随后进入步骤2。
3 交通仿真实验
3.1 仿真场景
本文以上海临港中运量2号线工程实践中的海港大道-环湖西三路交叉口为例。通过对海港大道-环湖西三路实地调查,发现西进口左侧为临港第一中学和建平临港小学,且在康乃馨路有大量路内停车位,社会车辆有从西进口掉头的需求。由于T2线的修建,T2占用西进口最左侧的左转车道,导致如果T2线左转与西进口的掉头车辆同时放行,存在冲突,需要分隔T2与西进口掉头社会车辆的通行权。
3.2 交通需求与配时参数
为了分析各种交通负荷,对于本文所提出的感应式公交专用相位的影响,本文选择7个交通需求影响因素。所有影响因素独立随机构成一个交通需求场景。各种需求的具体范围如下表1所示。
为了保障安全性本文采用固定的相位相序方案,且保持信号周期时长不变。具体信号配时参数如下图所示,对于绿灯间隔时间本文采用经典设置,即黄灯3s,全红2s,相位相序设置见图5-6。
3.3 仿真方案设计
本文为了验证算法的有效性和适用条件,采用VISSIM结合 COM的形式。参考文献[7],选取全体车辆平均延误作为交通口性能的评价指标。渠化、信号控制和交通需求都会对交叉口的运行效率产生较大影响。本文主要有两个任务。
(1)不同交通需求场景的算法适用性研究。
(2)不同的公交发车间隔条件下,固定式公交专用相位、感应式公交专用相位的延误变化情况。
交通需求场景的影响众多,涉及到交叉口渠化、交通流量、信号控制技术、驾驶员特性等。为了让本文所设计的交通场景,具有一定的代表性。本文参考D-最优设计[8-9],生成1000个交通需求场景。
3.4 对比分析
(1)不同信号控制方案对比分析
由上图8可知,交叉口平均延误采用固定式>感应式>常规,这也是符合预期的认识,无论是固定式或者感应式,都压缩了其它方向的通行时间,对于交叉口的通行效率都会产生消极的影响。从降低对社会车辆影响的角度,应较量减少公交相位的使用频率,设置感应式公交相位更优;从公交优先的角度,固定式公交相位明显要好于感应式公交相位,应以设置固定式公交相位为最佳。但往往需要实现社会车辆与公交车辆的效率最大化,这时采用感应式的公交专用相位更佳。
(2)公交车发车间隔影响分析
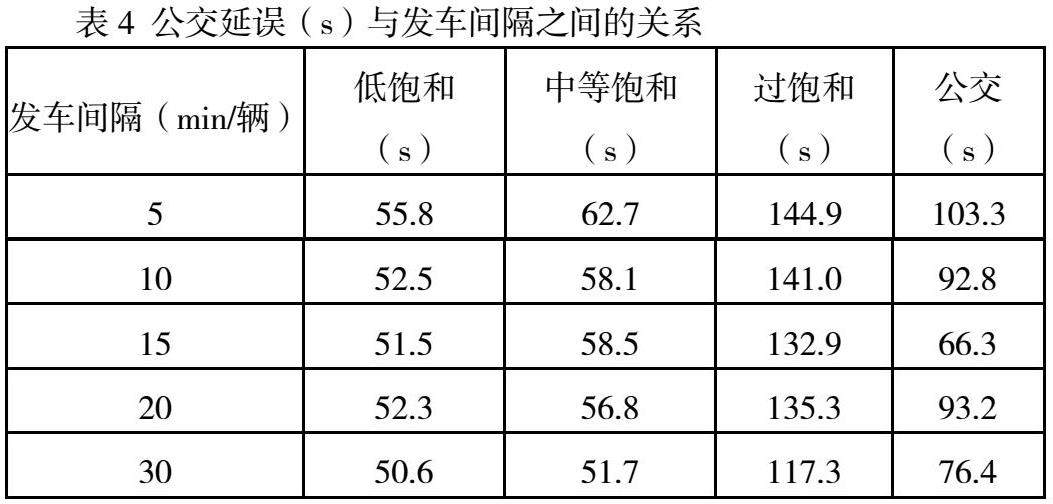
由下图9可知,随着发车间隔的不断减小,采用感应控制的方式,公交车辆的延误呈现先减小后增加的趋势,发车间隔达到15min/辆时,公交车辆延误达到最小;当交叉口饱和度较低或者中等情况下,采用感应控制的方式,可以较好的降低公交延误且对于社会车辆延误的影响较小;当交叉口过饱和情况下,不宜采用感应式公交相位。
4 结论
(1)本文通过对传统的固定式的公交专用相位的改进,提出一种在车辆协同条件下,感应式公交专用相位设置算法,在保证安全性的前提下和尽量减少对于上下游协调控制影响的前提下,详细的给出算法流程,并参考公交车辆到达OBU检测边界的速度,结合匀速运动模型,尽可能提高公交车辆的通行效率。
(2)通过仿真验证,感应式公交专用相位相对于传统的固定式公交专用相位,在特定的条件具有极大的优越性。当公交车辆的发车间隔较大且交叉口饱和度较低时,采用感应式的公交专用相位,可以在保证社会车辆通行效率的前提下,提高公交车辆通行效率。
(3)本文在信号控制方案的切换过程中,采用匀速运动模型,具有一定的局限性,且选择的交通场景单一,交通需求的种类有限,主要是考虑了公交发车间隔这个主要因素,对于其他次要因素考虑不周全。
参考文献:
[1]马万经,杨晓光.公交信号优先控制策略研究综述[J].城市交通,2010,8(06):70-78.
[2]左淑霞.基于悉尼自适应交通控制系统的城市公交信号优先控制方法[J].交通与运输,2021,37(03):56-60.
[3]沈超群,陆键,朱胜雪,魏代梅.一级公路非信号控制路口远引掉头选位研究[J].公路交通科技,2013,30(09):122-127.
[4]张小龙,赵界,李冰,杨鸿宇.车辆提前掉头几何参数设置及阈值流量研究[J].公路交通技术,2022,38(01):135-141+148.
[5]吴娇蓉,林清凯,邓泳淇.基于公交线路运行稳定性的潜在公交专用道需求识别方法[J/OL].吉林大学学报(工学版):1-8[2023-02-08].
[6]陈伟.基于车路协同的公交专用道交通管理设施设置[J].重庆交通大学学报(社会科学版),2022,22(01):60-65.
[7]徐洪峰,陈虹瑾,张栋,陆千惠.逆向左转交叉口的全感应公交优先信号控制技术[J].中国公路学报,2023,36(01):214-225.
[8]VANNIYANSINGAM T,DALAY C,JIN X,et al. Investigating the impact of design characteristics on statistical efficiency within discrete choice experiments:A systematic survey[J]. Contemporary Clinical Trials Communications, 2018, 10:17-28.
[9]GAO L, ZHOU J.Minimax D-optimal designs for multivariate regression models with multi-factors[J]. Journal of Statictical Planning and Inference, 2020, 209:160-173.
作者简介:马文(1984-),男,硕士,公交优先。

 京公网安备 11011302003690号
京公网安备 11011302003690号


